ватель 12 к другому входу ПЗУ 13. В вентильном электроприводе компенсируются пульсации вращающего момента в более широком диапазоне режимов работы. Это обусловлено возможностью выбора из ПЗУ 13 корректирующей функции, компенсирующей отклонения вра1
Изобретение относится к электротехнике, в частности к электроприводам с вентильным двигателем постоянного тока, и может быть использовано в системах управления в повьшенными требованиями к постоянству вращающего момента исполнительного двигателя
Целью изобретения является повьппе- ние качества регулирования путем уменьшения пульсаций вращающего момента за счет коррекции форм фазных токов специальными функциями.
На чертеже представлена схема вентильного электропривода.
Вентильный электропривод содержит синхронный электродвигатель 1, фазные обмотки 2 и 3 которого подключены к выходам регуляторов 4 и 5 тока, управляющие входы которых соединены с выходами основных умножающих цифро- аналоговых преобразователей (УАЦП) 6 и 7, адресные входы которых соеди- нейы с выходами постоянных запоминающих устройств (ПЗУ) 8 и 9 задания форм фазных токов, умножающий хщфро- аналоговый преобразователь (У1ТАП) 10 подключенньй аналоговым входом к выходу узла 11 сравнения и соединенный с входом аналого-цифрового преобразователя (АЦП) 12, выходы которого соединены с m адресными входами постоянного запоминающего устройства (ПЗУ) 1 задания корректирующих функций, п адресных входов которого соединены с выходами кодового датчика 14 углового положения ротора, а вькоды соединены с входами дополнительного умножающего .цифроаналогового преобразователя 10, при этом на один вход узла 11 сравнения поступает сигнал задания скорости, а на другой - сигнал с датчика 15 скорости.
щающего момента от заданного среднего значения на каждом элементарном угле поворота ротора при любом сигнале рассогласования Ug;. Коррекция производится регулированием токов в фазах синхронного электродвигателя. 1 ил.
Вентильный электропривод работает следующим образом.
Информация об угле поворота вала синхронного электродвигателя 1, представленная в двоичном коде cL , поступает с выхода кодового датчика 14 углового положения на адресные входы основных ПЗУ и задания форм токов в фазных обмотках, а также на п адресных входов ПЗУ 13.
ПЗУ 8 и 9 преобразуют информацию об. угле поворота вала в синусоидаль ную и косинусоидальную функции, представленные в двоичном коде. С выходов
ПЗУ 8 и 9 сигналы поступают на цифровые -входы соответственно первого 6 и второго 7 УЦАП схемы формирования фазных токов.
В узле 11 сравнения производится
сравнение входного сигнала U и сигнала обратной связи по скорости , поступающего с выхода датчика 15 скорости. Сигнал рассогласования и поступает с выхода узла 11 сравнения
на аналоговый вход УЦАП и на вход АЦП 12. С выхода АЦП 12 информация в двоичном коде ё поступает на m адресных входов ПЗУ 13. По сигналам ё , поступающим с -выхода АЦП 12 из
всего массива корректирующих функций F (d , е ), хранящихся в ПЗУ 13, выбирается та функция F (ot), которая соответствует данному значению , а соответственно и U.
В дальнейшем при неизменном U j- и при вращении выходного вала привода на выходе ПЗУ 13 формируется функция F (Z).
При изменении Uj. происходит выбор из ПЗУ 13 другой корректирующей функции F (ci).
Информация с выхода ПЗУ 13 поступает на адресные входы дополнительного УЦАП 10, который производит умножение сигнала рассогласования , поступающего со схемы 15 сравнения на корректирующую функцию F. (cZ).
С выхода дополнительного УТ1АП 10 аналоговый сигнал U F-(ot) поступает на аналоговые входы перво- го и второго 7 ЗТ1АГТ задания форм то- ков в фазных обмотках, которые осуществляют преобразование информации,
поступающей с первого 8 и второго 9 ПЗУ, в аналоговые сигналы с умножением их на корректирующие напряжения, На выходе первого УЦАП 6 вырабатывается напряжение U , а на выходе второго 5ЩАП 7 - напряжение и.
С выходов первого 6 и второго 7 УЦАП аналоговые сигналы подаются на первые входы соответственно первого 5 и второго 6 регуляторов тока, которые обеспечивают изменение токов в фазных обмотках 2 и 3 синхронного электродвигателя.
Таким образом, в вентильном электроприводе компенсируются пульсации вращающего момента в более щироком диапазоне режимов его работы, так как в с необходимой разрешающей способностью, определяемой числом выходных разрядов АЦП 12 и числом, m, адресных входов ПЗУ 13,,при любом сигнале рассогласования U из дополнительного ПЗУ 13 может быть выбрана корректирующая функция F (Я), позволяющая с необходимой точност ью, определяемой числом выходных разрядов ПЗУ 13. и числом цифровых входов УЦАП 10, компенсировать отклонения вращающего момента от заданного среднего значения на каждом элементарном угле поворота вала электропривода, определяемом числом выходных разрядо кодового датчика 14 углового положения и числом п адресных входов ПЗУ 13 а коррекция производится путем регулирования токов в фазах электрическо машины,, что позволяет исключить влияние индуктивностей и разброса активных сопротивлений фазных обмоток
Редактор А.Шандор
Заказ 4338/58Тираж 631 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж- 35, Раущская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
на их величину и форму в динамических режимах работы электропривода.
Формула изобретения
Вентильный электропривод, содер- жапщй синхронный электродвигатель, фазные обмотки которого подключены к выходам соответствующих регуляторов тока, управляющие входы которых соединены с выходами соответствующих основных умножающих цифроаналоговых преобразователей, адресные входы ко- . TOpiK соединены с соответствующими выходами постоянных запоминающих устройств задания форм фазных токов, а аналоговые входы связаны с выходом узла сравнения, на первый вход которого поступает сигнал задания скорости, а второй соединен с выходом датчика скорости, связанного с валом синхронного электродвигателя и кодовым датчиком углового положения ротора, выходы которого соединены с ад.- ресными входами постоянных запоминающих устройств задания форм фазных токов, отли.чающийс.я тем, что, с целью повышения качества регу-- лирования путем уменьшения пульсаций вращающего момента за счет коррекции форм.фазных токов специальными функциями, в него введены аналого-цифровой преобразователь, постоянное запо-. минающее устройство задания корректирующих функций и дополнительный умножающий цифроаналоговый преобразователь, подключенньй аналоговым входом к выходу узла сравнения и соединенный с входом аналого-цифрового преобразователя, выходы которого соединены с m адресными входами постоянного запоминающего устройства задания кор- ректирзпощих функций, п адресных входов которого соединены с выходами кодового датчика углового положения ротора, а выходы соединены с соответствующими входами дополнительного умножающего цифроаналогового преобразователя.
Составитель М.Сон Техред л,Олейник
Корректор Л,Пилипенко
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1985 |
|
SU1324088A1 |
| Вентильный электропривод | 1985 |
|
SU1334344A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1471276A1 |
| Устройство для калибровки вентильного электродвигателя | 1985 |
|
SU1358060A1 |
| Устройство для калибровки вентильного электродвигателя | 1987 |
|
SU1417155A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Устройство для поверки и калибровки вихретоковых приборов | 1988 |
|
SU1538110A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1751836A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С НЕУПРАВЛЯЕМЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА | 1993 |
|
RU2067352C1 |
Изобретение относится к электротехнике и может быть -использовано в системах управления с повьппенными требованиями к постоянству вращающего момента исполнительного двигателя; Целью изобретения является повышение качества регулирования. Вентильный электропривод содержит синхронный электродвигатель, обмотки 2 и 3 которого подключены к регуляторам 4 и 5 тока соответственно-. На валу электродвигателя установлены тахогенератор и кодовый датчик 14 углового положения ротора. Выход датчика 14 подключен к одному входу постоянного запоминающего устройства (ПЗУ) 13 и через ПЗУ 8 и 9, умножающие цифроана- логовые преобразователи 6 и 7, к уп- р авляющим входам регуляторов 4 и 5 тока. Выход тахогенератора соединен с первым входом узла 11 сравнения. На второй вход этого узла подается сигнал задания скорости. Выход узла 11 подключен к входу умножающего цифроаналогового преобразователя 10 и через аналого-цифровой преобразо- i (Л 1C 4 СО Од 00 4;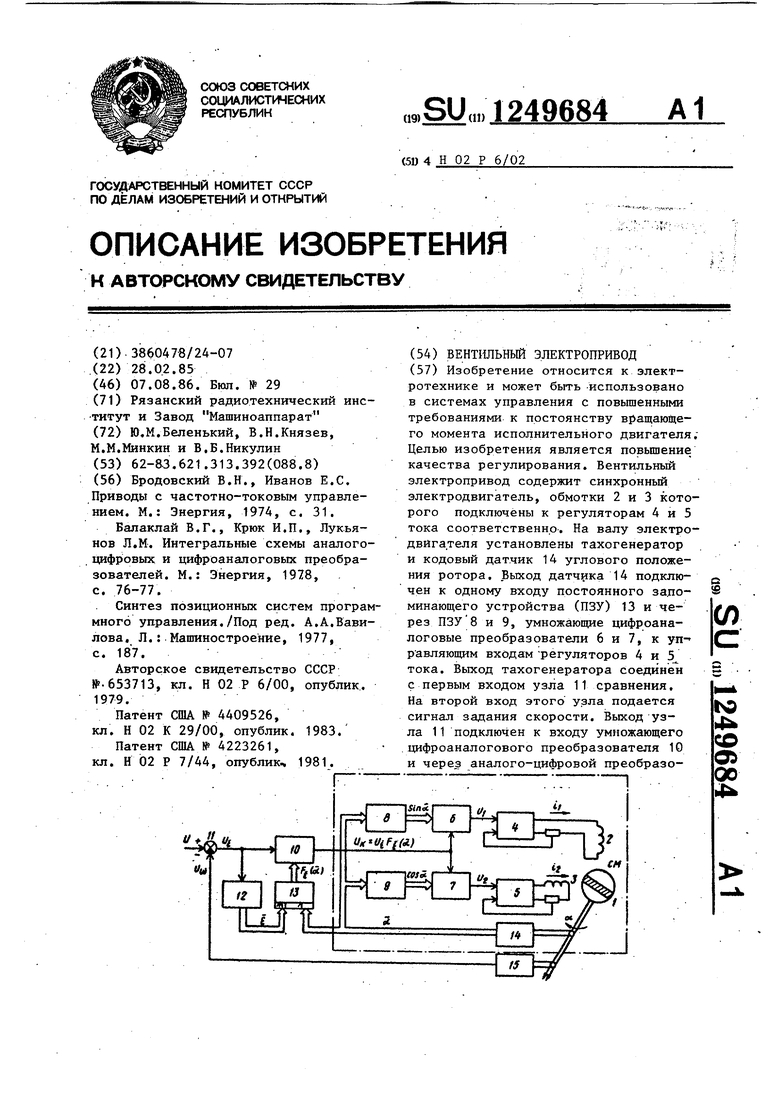
| Бродовский В.И., Иванов E.G | |||
| Приводы с частотно-токовым управлением | |||
| М.: Энергия, 1974, с | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| Балаклай В.Г., Крюк И.П., Лукьянов Л.М | |||
| Интегральные схемы аналого- цифровых и цифроаналоговых преобразователей | |||
| М.: Энергия, 1978, с | |||
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| Синтез позиционных систем программного управления./Под ред | |||
| А.А.Вавилова | |||
| Л.: Машиностроение, 1977, с | |||
| Индукционная катушка | 1920 |
|
SU187A1 |
| Способ калибровки шагового электродвигателя | 1977 |
|
SU653713A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
| Патент США № 4409526, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Патент США № 4223261, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
