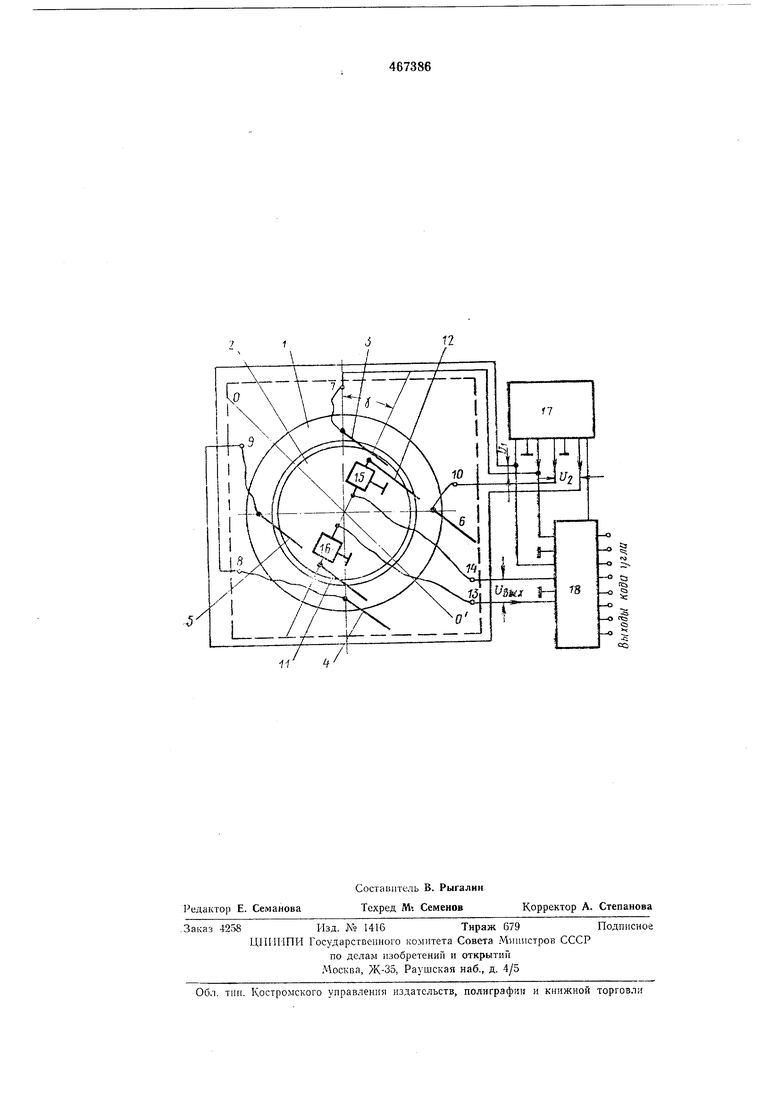
телей 15 и 16 можно получить с помощью применения полевых транзисторов. Предложенный датчик угла поворота вала содержит также генератор 17 и преобразователь 18 разового сдвига в код. Ротор 1 датчика имеет возможность поворачиваться вместе с контролируемым валом вокруг оси 00 на угол у. Генератор 17 генерирует два равных по величине напряжения синусоидальной формы, сдвинутые по фазе относительно друг друга на 90°. Преобразователь 8 преобразует величину фазового сдвига выходного спгнаjta t/пых относительно напряжения U в цифровой код. ;7i f/msin i f.(1) ;72 ()5f. процесс нреобразования угла у поворота вала в электрический выходной сигнал датчика блых происходит следующим образом. Результирующее электрическое поле между обкладками 3-6 получается вращающимся в пространстве с угловой скоростью & при подаче на эти обкладки напряжений 6; и Ui от генератора 17. Разность ютенциалов в таком тюле между симметрично расположенными точка.(к крепления обкладок 11 и 12 на статоре 2 можно выразить следующей формулой: C/mSin((0 -T-4) обкладок где: ti-расстояние точек креплепкя 11 и 12 от осп 00; Т2 - расстояиие точек крепления обкладок 3 и 4 от оси 00; г). - фазовый сдвиг; il5 Y+g, где: Y - угол поворота ротора 1 по отношению к статору 2; I - дополнительный фазовый сдвиг, вызываемый нелинейностью линий поля электрической напряженности конденсаторов. При этом весьма важно, что функциональная зависимость этого дополнительного фазового сдвига от угла поворота ротора {Y) строго определяется конкретным конструктивным исполнением датчика, что позволяет этот фазовый сдвиг I полностью скомпенсировать. В случае большого входного импеданса усилителей 15 и 16 разность напряжений на входах этих усилителей близка по величине приведенной выше разности потенциалов Дер между точками расположения обкладок II и 12. Принимая коэффициенты усиления понанряжению усилителей 15 и 16, например, равными единице, можно написать следующее выражение для выходной разности потенциалов LliLrx этих усилителей: /вых 6niSin (oj/-|- ji) . Сравнивая выражения (4) и (2) с выражением 1 для напряжения U, видим, что угол у поворота вала можно определить измерением фазового сдвига между напряжениями f/i и f/Bbix и вычитанием из результата измереиия фазового сдвига г|з определенной поправки S(Y), т. е. у г|;-Е(у). Измерение фазового сдвига ij5 и введение строго определенной поправки |(у) вы ПОЛИ яется с высокой точностью, например, с помощью преобразователя 18 фазового сдвига в цифру с элементами, вносящими понравку (у) в результат преобразования. Предмет изобретения Дискретный датчик угла поворота вала, содержащий конденсатор, выполненный в виде концентрично расноложенных цилиндрических ротора и статора с обкладками, причем обкладки ротора подключены к источникам переменных напряжений, сдвинутых по фазе на 90°, а обкладки статора подключены ко входам усилителей, выходы которых соединены с преобразовстелем фазового сдвига в код, отличающийся тем, что, с целью новышения точности датчика в работе, обкладки ротора и статора выполнены в виде прямых отрезков проводника, а усилители расположепы внут1)н цилиндрического статора.
/ ,/
3 Ч
Сз rcs сз
«г О
| название | год | авторы | номер документа |
|---|---|---|---|
| Емкостной абсолютный преобразователь угловых перемещений | 2021 |
|
RU2773267C1 |
| Емкостной абсолютный преобразователь угловых перемещений | 2019 |
|
RU2724150C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Преобразователь угла поворота вала в код | 1973 |
|
SU467389A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Способ преобразования угла поворота вала фазовращателя в код | 1986 |
|
SU1458973A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1249702A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Фазовая система преобразования угла поворота в код | 1974 |
|
SU567163A1 |