переход привода из режима равноускоренного движения в режим равнозамед- ленного движения, при этом изменяется знак суммарного входрюго сигнала однополярньгх усилителей 7 и 8, и в
Изобретение относится к электротехнике и может быть использовано в позиционных электроприводах механизмов.
Целью изобретения является улуч- шение качества переходных процессов в позиционном электроприводе.
На фиг.1 приведена функциональная схема позиционного электропривода; на фиг.2 - графики, поясняю- щие его работу.
Позиционный электропривод содержит электродвигатель 1, подключенный к преобразователю 2, задатчик 3 положения, датчики положения 4 и ско рости 5, элемент 6 сравнения, входы которого соединены с выходами задат- чика 3 и датчика 4 положения, два од нополярных усилителя 7 и 8 с двумя входами,.два ключа 9 и 10, два ло- гических элемента ИЛИ 11 и 12, четыре компаратора 13-16 с двумя входами, датчик 17 ускорения, задатчи- ки максимальных значений ускорения 18 и скорости 19, квадратор 20.
Первые входа первого 7 и второго 8 однополярных усилителей соединены с выходом элемента 6 сравнения, вторые входы первого 7 и второго 8 однополярных усилителей соединены с выходом квадратора 20, вход которого подключен к выходу датчика 5 скорости и к первым входам первого 13 четвертого 16 компараторов, вторые входы которых соединены с выходами задатчика 19 максимального значения скорости, выход датчика 17 ускорени соединен с первьши входами второго 14 и третьего 15 компараторов, вторые входы которых подключены к выхо дам задатчика 18 максимальных значений ускорения, выходы первого 13 и второго 14 компараторов соединены с входами первого 11 логического элемента ИЛИ, выход которого подключен к управляющему входу первого ключа
этом случае обеспечивается перемещение привода в заданное положение за минимальное время , т. е, уменьшается инерционность управления 2 ил.
9, выходы третьего 15 и четвертого 16 компараторов соединены с входами второго логического элемента ИЛИ 12, выход которого подключен к управляющему входу второго ключа 10, выходы первого 7 и второго 8 однополярных усилителей соединены с информационными входами соответственно первого 9 и второго iO ключей, выходы которых подключены к входам преобразователя 2.
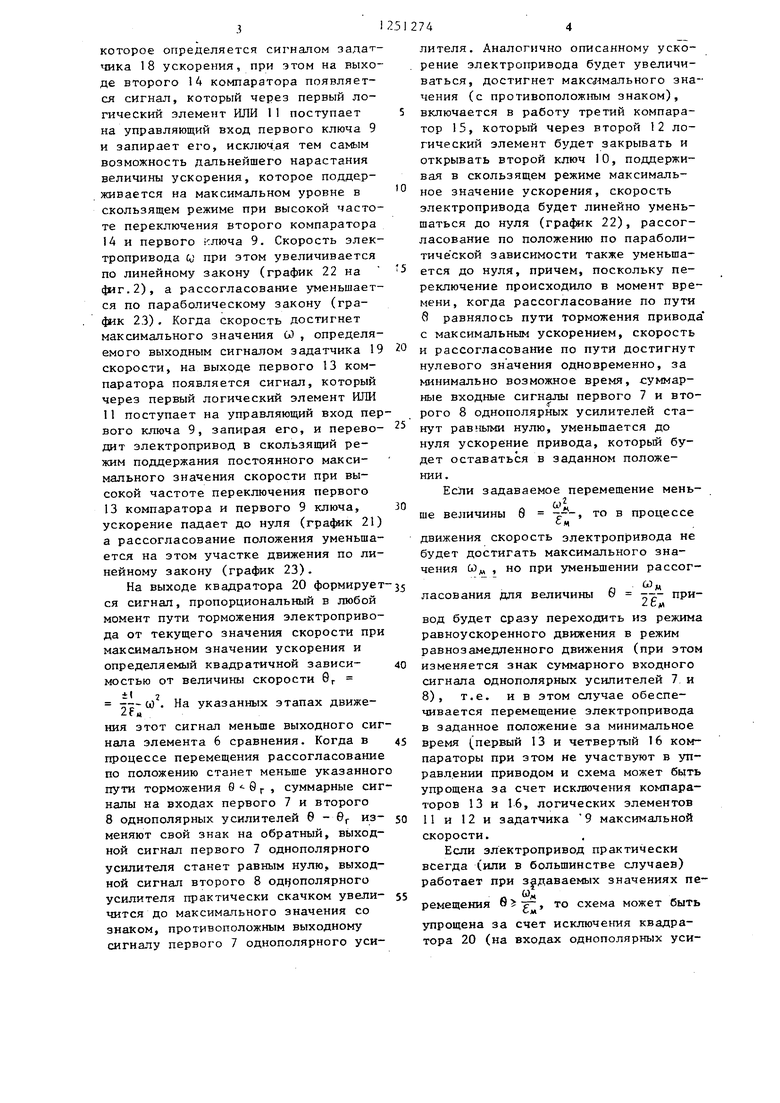
На фиг.2 графики 21, 22 и 23 характеризуют изменение ускорения, скорости и перемещения электропривода от исходного к заданному положению .
Позиционный электропривод работает следующим образом.
При поступлении с выхода задатчика 3 положения сигнала, пропорционального требуемому заданному положению Cj j, на выходе элемента 6 сравнения появляется сигнал рассогласования 9 cj-q), где ( - текущее значение положения. Этот сигнал поступает на входы первого 7 и второго 8 однополярных усилителей, причем вследствие однополярности указанных усилителей на выходе одного из них будет нулевой сигнал (например, на выходе второго однополярного усилителя 8), а на выходе второго из них (например, первого усилителя 7) вследствие большого коэффициента усилителей практически скачком появится максимальное напряжение (например, отрицательное), которое через открытый ключ 9 поступает на вход тирис- торного преобразователя 2 и вызывает нарастание ускорения электропривода .(график 21 на фиг.2) с интенсивностью, определяемой малыми постоянными времени преобразователя и двигателя .
Ускорение Г. электрогфивода быстро достигнет максимального значения f , ,
которое определяется сигналом задат- чика 18 ускорения, при этом на выходе второго 14 компаратора появляется сигнал, который через первый логический элемент ИЛИ 11 поступает на управляющий вход первого ключа 9 и запирает его, исключая тем самым возможность дальнейшего нарастания величины ускорения, которое поддерживается на максимальном уровне в скользящем режиме при высокой частоте переключения второго компаратора 14 и первого ключа 9. Скорость электропривода W при этом увеличивается по линейному закону (график 22 на 4иг.2), а рассогласование уменьшается по параболическому закону (график 23). Когда скорость достигнет максимального значения Q , определяемого выходным сигналом задатчика 19 скорости, на выходе первого 13 компаратора появляется сигнал, который через первый логический элемент ИЛИ И поступает на управляющий вход первого ключа 9, запирая его, и перево- дит электропривод в скользящий режим поддержания постоянного максимального значения скорости при высокой частоте переключения первого 13 компаратора и первого 9 ключа, ускорение падает до нуля (график 21) а рассогласование положения уменьшается на этом участке движения по линейному закону (график 23).
На выходе квадратора 20 формирует ся сигнал, пропорциональный в любой момент пути торможения электропривода от текущего значения скорости при максимальном значении ускорения и определяемый квадратичной завися- мостью от величины скорости 9
±12
-г-- со . На указанных этапах движе- f
ния этот сигнал меньше выходного сигнала элемента 6 сравнения. Когда в процессе перемещения рассогласование по положению станет меньше указанног пути торможения 9 0 , суммарные сигналы на входах первого 7 и второго 8 однополярных усилителей 6 - 6 из- меняют свой знак на обратный, выходной сигнал первого 7 однополярного усилителя станет равным нулю, выходной сигнал второго 8 од 5ополярного усилителя практически скачком увели- чится до максимального значения со знаком, противоположным выходному сигналу первого 7 однополярного уси
лителя. Аналогично описанному ускорение электропривода будет увеличиваться, достигнет максимального значения (с противоположным знаком), включается в работу третий компаратор 15, который через второй 12 логический элемент закрывать и открывать второй ключ 10, поддерживая в скользящем режиме максимальное значение ускорения, скорость электропривода будет линейно уменьшаться до нуля ( 22), рассогласование по положению по параболи- тиче ской зависимости также уменьшается до нуля, причем, поскольку переключение происходило в момент времени, когда рассогласование по пути Q равнялось пути торможения привода с максимальным ускорением, скорость и рассогласование по путн достигнут нулевого значения одновременно, за минимально возможное время, суммарные входные сигналы первого 7 и второго 8 однополярных усилителей станут равяыми нулю, уменьшается до нуля ускорение привода, который будет оставаться в заданном положении.
Если задаваемое перемещение меньы
величины
Q .
CM
то в процессе
движения скорость электропривода не будет достигать максимального значения Ы,
но при уменьшении рассогсо,
ласования для величины
а
У .-
вод будет сразу переходить из режима равноускоренного движения в режим равнозамедленного движения (при этом изменяется знак суммарного входного сигнала однополярных усилителей 7 и 8), т.е. и в этом случае обеспечивается перемещение электропривода в заданное положение за минимальное время (первый 13 и четвертый 16 компараторы при этом не участвуют в управлении приводом и схема может быть упрощена за счет исключения компараторов 13 и 16, логических элементов 11 и 12 и задатчика 9 максимальной скорости.
Если электропривод практически всегда (или в большинстве случаев) работает при задаваемых значениях пеWM
ремещекия с, то схема может быть
е
упрощена за счет исключе1гая квадратора 20 (на входах однополярных усилнтелсй 7 и 8 будут сравнивапзся текущее значение рассогласования по пути н максимальное при переходе к равнозамедленному движению значишь- сигнала).
11редлагаем лй электропривод позволяет уменьшить инерционность управления и улучшить качество переходных процессов.
Формула изобретения
Позиционный электропривод, содержащий электродвигатель, подключенный к тиристорному преобразователю, за- датчик положения, датчики положения и скорости, элемент сравнения, входы которого соединены с выходами задат- чика и датчика положения, отличающийся тем, что, с целью улучшения качества переходных процессов, в .него введены два однополярных усилителя с двумя входами, два клк.ча два логических элемента ИЛИ, четыре компаратора с двумя входами, датчик ускорения и задатчики максимальных значений ускорения и скорости, квадратор, причем первые входы первого
и второго однополнрргых усилителей соединены с выходом элемента сравнения, вторые входы первогг и второго одно- полярных усилителей соединены с выходом квадратора, вход которого подключен к выходу датчика скорости и к первым входам первого и четвертого компараторов, вторые входы которых
соединены с выходами задатчика максимального значения скорости, выход датчика ускорения соединен с первыми ,входами второго и третьего компараторов, вторые входы которых подключены к выходам задатчика максимальных значений ускорений, выходы первого и второго компараторов сое- динены с входами первого логического элемента ИЛИ, выход которого подключен к управляющему входу первого ютюча, выходы третьего и четвертого компараторов соединены с входами второго логического элемента ИЛИ, выход которого подключен к управляющему входу второго ключа, выходы первого и второго однополярных усилителей соединены с информационными входами соответственно первого и второго ключей, выходы которых подключены
к входам преобразователя.
I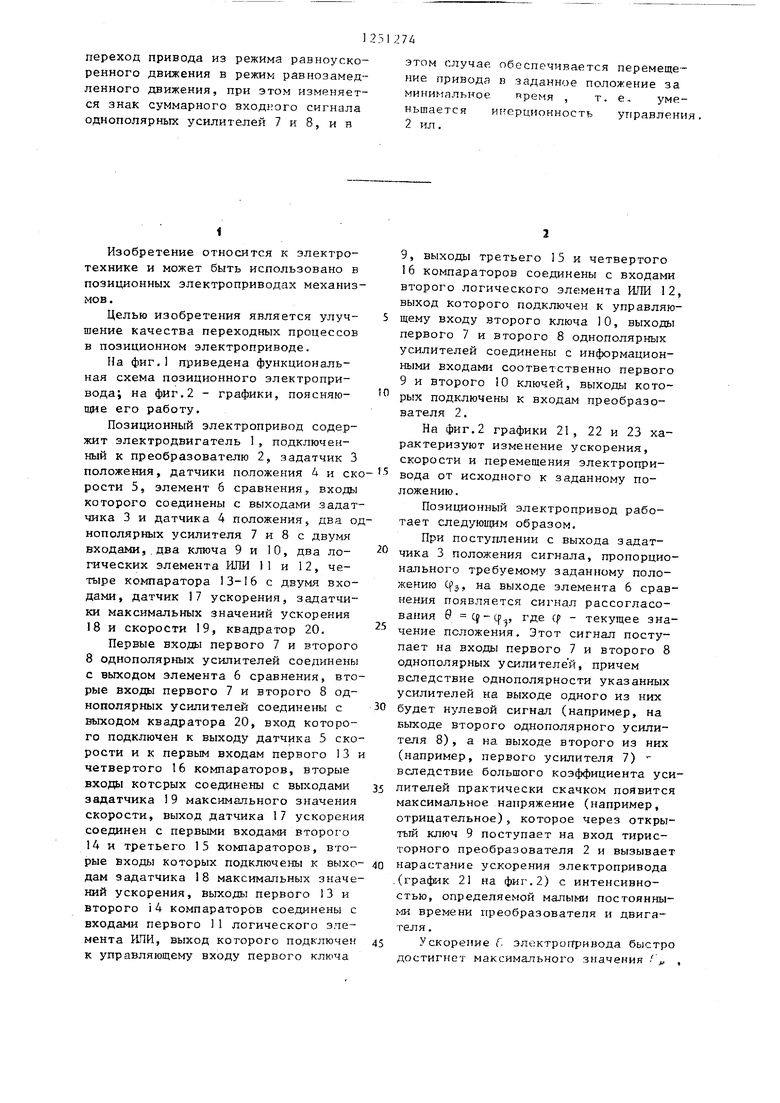
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Позиционный электропривод постоянного тока | 1984 |
|
SU1246313A1 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| Система регулирования положения | 1990 |
|
SU1795416A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Устройство для точного останова электропривода | 1985 |
|
SU1272447A1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| Электропривод бурового станка | 1987 |
|
SU1515310A1 |
, Изобретение относится к электротехнике и может быть использовано в позиционных электроприводах механизмов. Цель изобретения - улучшение качества переходных процессов. Устройство содержит электродвигатель 1 , преобразователь 2, задатчик 3 положения , датчик 4 положения, датчик 5 скорости, элемент 6 сравнения. Кроме того, в устройство введены однополяр- ные усилители 7 и 8, ключи 9 и 10, логические, элементы ИЛИ 11 и 12, компараторы 13-16, датчик 17 ускорения, задатчики макс, значений ускорения 18 и скорости 19, квадратор 20. Введение указанных блоков обеспечивает (Л
Редактор М.Бандура
Составитель В.Трофименко
ТехреД Г.Гербер Корректор М.Пожо
Заказ 4424/56Тираж 631 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная, 4
| Следящие привода /Под | |||
| ред | |||
| Б.К.Чемоданова | |||
| Кн | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.:Энергия, 1976, с.4, рис.9-1 | |||
| Справочник по автоматизированному электроприводу /Под ред | |||
| В.Л.Елисеева, А.В.Шинянского | |||
| М.:Энергоатом- издат, 1983, с.337, рис.10, 11. | |||
