И обротсиис относится к деревообработке и может быть исгтользовано в позицион1{ых приводах перемещений рабочих органон например, пильных суппортов .
Цель изобретения - повьш ение надежности и VTiponieHHe конструкции исполнительного механизма.
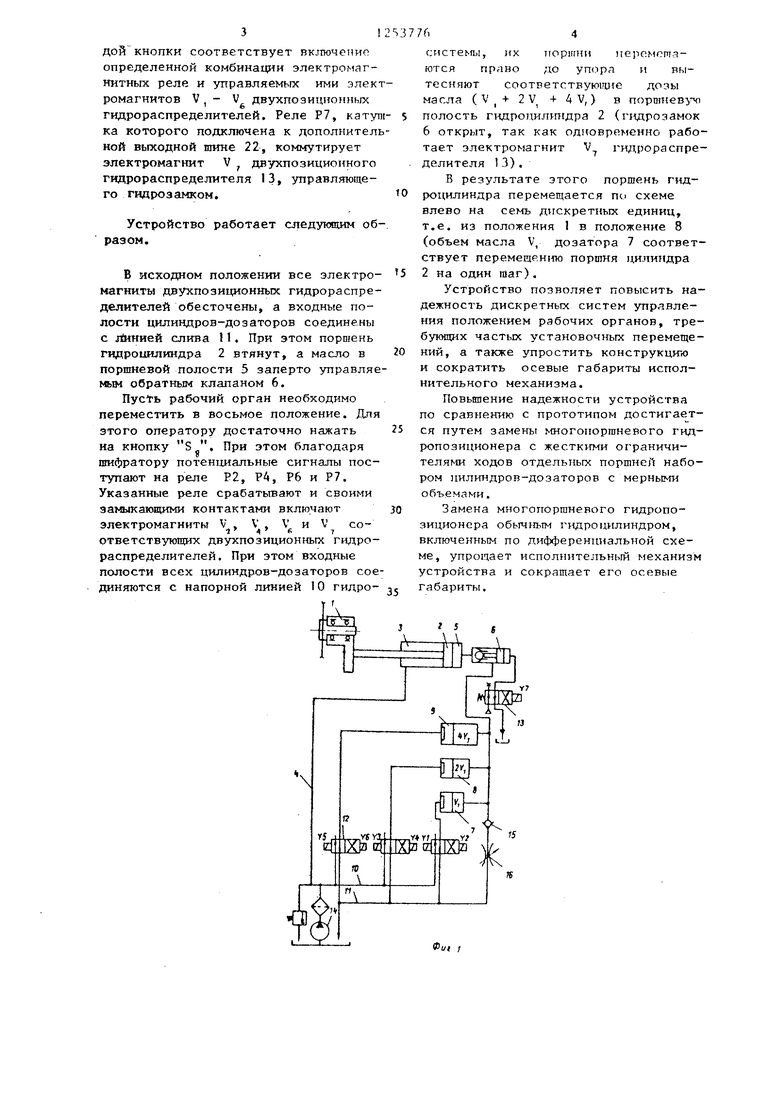
На Лиг, 1 показана принципиальна- гидравлическая схема; на фиг. 2 принципиальная электрическая схема устройства.
Дискретные установочные перемещения рабочего органа (суппорта) I осуществляются исполнительным механизмом (гидроцилиндром) 2, штоковая полость 3 которого с эффективной площадью поршня F постоянно соединена с напорной линией 4 гидросистемы. Поршневая полость 5 гидроцилиндра с эффективной плошадью поршня F соединена через управляемьш обратный клапан (гидрозамок) 6 с выходными полостями гидроцилиндров-дозаторов 7j8 и 9, Объемы цилиндров-дозаторов являются мерными и построены по закону двоичного взвешенного кода, т.е. объем первого из них V , второго 2 V, т. -ретъего 4 V и т.д.
Входные Полости каждого цилиндра- дозатора могут подключаться к напорной 10 или сливной 11 линиям гидросистемы посредством соответствующих двухпозициоиньгх электроуправляемых гидрораспределителей 12, Поршень каждого илиндра-дозатора может занимать одно из двух устойчивых положений в зависимости от того какой из двух магнитов гидрораспределителя (четный или нечетньй) включен. При включении электронаг нитов с нечетными номерами (V,, V., V,) входные полости дозаторов соединяются со сливной линией 11 гидросистемы и поршни втянуты, т.е. находятся в левом крайнем положении (фиг.1). При этом поршень гидроцилиндра 2 находится в правом крайнем положении (шток втянут). При включении электромагнитов с четными номерами (V , 1 V) входные полости дозаторов
4 Ь
соединяются с напорной линией 10 гидросистемы и их поршни смещаются вправо, выталкивая мерные дозы масла в порпгасвуто полость гидро1и1линд- ра 2.
Величина перемещения поршня исполнительного механизма 2 и жестко
святанного с ним рабочего органа определяется количеством жидкости,поступившей в его поршневую полость из дозаторов, при этом соответствукяцее количество масла вытесняется из што- ковой камеры гидроцилиндра иа слив, поскольку F F (обычно F, 2F ).
Общее коли чество N-дискретных положений поршня гидроцушиндра определяется соотношением
h
N 2 ,
где п - число цилиндров-дозаторов.
Так по схеме, показанной на фиг.1. поршень может зан{1мать одно из 8 (2 8) дискретных положений с шагом, определяемым объемом дозатора 7, т.е. младшего разряда.
Управляемый обратный клалан 6 играет роль гидравлического ,который запира.ет поршневую полость 5 гидроцилиндра и тем надежно фиксиРУет положение поршня при обесточенном электромагните V, дополнительного двухпозиционного электроуправляемого гидрораспределителя 13.
Гидросистема питается от насоса 14 постоянной производительности.Обратный клапан 15 и регулируемый дроссель 16, установленные в сливной линии 1, обеспечивают подпитку рабочих полостей цилиндров-дозаторов,когда их поршни занимают левое (фиг.1)
исходное положение. При этом компенсируются погрешности, вызываемые утечкам 1 жидкости.
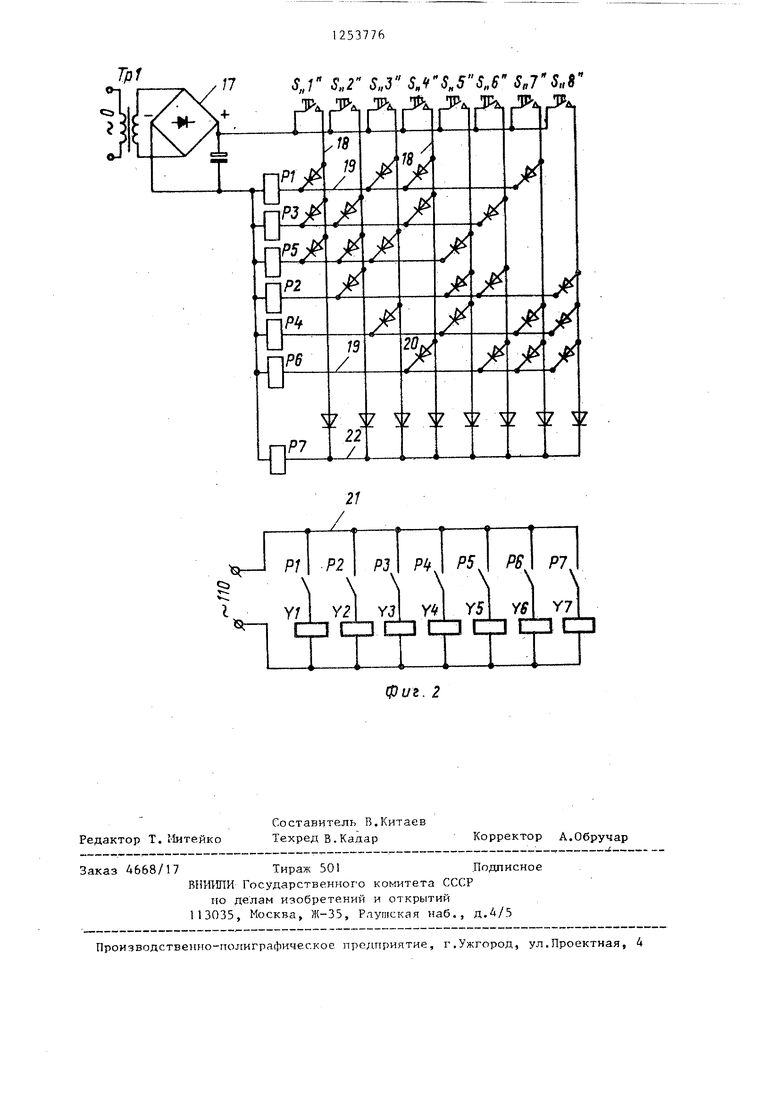
Управле ;-(е величиной дискретного перемещения рабочего органа осуществляется с помощью шифратора с диодной матрицей, подключенного к выпрямителю 17 (фиг.2). Шифратор состоит из входных вертикальных 18 и выходных горизонтальных 19 шин, связанных
между собой через полупроводниковые диоды 20. Шифратор (фиг.2) имеет восемь шин (определяется числом требуе- мъгх дискретных положений рабочего органа) и семь горизонтальных вьгходfftrx шин, к которым подключены катушки электромагнитных реле Р1 - Р7. Контакты реле находятся в силовой цепи 21 и коммутируют электромагниты V , - V, соответствующих двухпозиционных г идрораспределителей.
Входные шины шифратора присоединены к замыкающим контактам кнопок S I - S задания позиций. Нажатию каж
ДОЙ КНОПКИ соответствует включение определенной комбинации электромагнитных реле и управляемых ими электромагнитов V, - V двухпозиционных гидрораспределителей. Реле Р7, катуш ка которого подключена к дополнительной выходной шине 22, коммутирует электрюмагнит V , двухпозиционного гидрораспределителя 13, управл5поще- го гидрозамком.
Устройство работает следукжщм образом.
В исходном положении все электро- магниты двухпозиционных гидрораспределителей обесточены, а входные полости цилиндров-дозаторов соединены с слива 11, При этом поршень гидроцилиндра 2 втянут, а масло в поршневой полости 5 заперто управляемым обратным клапаном 6.
Пусть рабочий орган необходимо переместить в восьмое положение. Для этого оператору достаточно нажать на кнопку S . При этом благодаря шифратору потенциальные сигналы поступают на реле Р2, РА, Р6 и Р7. Указанные реле срабатывают и своими замыкающими контактами включают
V и V
fi 7
соэлектромагниты V, ответствующих двухпозиционных гидрораспределителей. При этом входные полости всех цилиндров-дозаторов соединяются с напорной линией 10 гидро-
to
- 5
53Q
го
25
системы, их иоркгни переметаются прлво до yniipa и вытесняют соответствуюнцте дозы масла ( V I 2 V + А V, } в поршневз-ч полость гидроцилшадра 2 (гидрозамок 6 открыт, так как одновременно работает электромагнит V гидрораспределители 13).
В результате этого поршень гнд- роцилиндра перемещается по схеме влево на семь дискретных единиц, т.е. из положения 1 в положение 8 (объем масла V, дозатора 7 соответствует перемещению поршня 1;илиндра 2 на один шаг).
Устройство позволяет повысить надежность дискретньгх систем управления положением рабочих органов, требующих частых установочных перемещений, а также упростить конструкцию и сократить осевые габариты исполнительного механизма.
Повьнпение надежности устройства по сравнению с прототипом достигае т- ся путем замены многопорганевого гидропозиционера с жесткими ограничителями ходов отдельных поршней набором цилиндров-дозаторов с мерными объемами.
Замена многопоршневого гидропозиционера обычга 1м гидро цилиндром, включенным по дифференциальной схеме, упрощает исполнительный механизм устройства и сокращает его осевые габариты.
Фи1
l Y/ I YJ Зг
J
i iL ш
1 CZD nn en Си
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дискретного позиционирования рабочих органов | 1981 |
|
SU954215A1 |
| Двухпильный обрезной станок | 1983 |
|
SU1219342A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1998 |
|
RU2148196C1 |
| Привод гидравлического пресса | 1983 |
|
SU1147597A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ГУСЕНИЧНОМ ХОДУ | 2013 |
|
RU2531425C2 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1761844A1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ НАЖИМНЫМ УСТРОЙСТВОМ КЛЕТИ ПРОКАТНОГО СТАНА | 2008 |
|
RU2381851C1 |
| Устройство для гидромеханического формообразования изделий | 1989 |
|
SU1639863A1 |
| Гидропривод шагового перемещения исполнительного органа горной машины | 1983 |
|
SU1106899A1 |
| ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2010 |
|
RU2436696C1 |
Редактор Т, Мнтейко
Составитель В.Китаев Техред В.Кадар
Заказ 4668/17Тираж 501.Подписное
ВНИИПИ Государственного комитета СССР
гю делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
фиг. 2
Корректор А.Обручар
| УСТРОЙСТВО для ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 0 |
|
SU259345A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Кузнецов В.И | |||
| Автоматизация установочных перемещений в деревообраба- тьшающих станках | |||
| М.: Лесная промышленность, 1981 , с.117-120, р.3.3, 3.4. | |||
