Изобретение относится к прессовому оборудованию, в частности к приводам гидравлических прессов, обеспечивающих перемещение рабочих органов пресса в соответствии с заданной программой.
Цель изобретения - расширение технологических возможностей пресса путем увеличения диапазона скоростей перемещения рабочих органов пресса и упрощения смены программ при изменении режимов работы.
На фиг. 1 изображена электрогидравлЕческая схема привода; на фиг. 2 - вариант привода стремя цилиндрами-дозаторами разной емкости.
Привод включает в себя исполнительный гидроцилиндр 1, шток 2 которого связан с рабочим органом пресса. Гидроцилиндр 1 поршневой и штоковой полостями подключен к напорной магистрали 3 посред-, ством магистралей 4 и 5 через гидрораспределитель 6.
Привод имеет цилиндр-дозатор 7, представляющий собой гидравлическую емкость, разделенную свободно плавающим разделительным поршнем 8 на две полости - правую и левую (по чертежу). Маневровый объем дозатора (объем жидкости, вытесняемой ходом поршня от упора до упора) может регулироваться подвижным упором 9.
Поршневая полость гидроцилиндра I также соединена через переключающее устройство 10 с левой (при положении переключающего устройства, изображенном на фиг. 1) полостью дозатора 7. Правая полость дозатора 7 при этом положении переключающего устройства 10 через второй гидрораспределитель 11 (золотник распределителя находится в правом положении) соединена с напорной магистралью 3. При переключении устройства 10 в левое положение соединение полостей дозатора меняется: поршневая полость гидроцилиндра 1 оказывается соединенной с правой полостью дозатора 7, а левая полость последнего в это время соединена с напорной магистралью 3.
В качестве переключающего устройства 10 может быть применен любой двухпозиционный переключатель с электроуправлением.
Программное устройство привода состоит из вычислительного блока 12, генератора 13 электрических импульсов и блока 14 формирования рабочих команд, являющихся типовыми элементами устройств программного управления. Все блоки электрически связаны между собой и, кроме того, вычислительный блок 12 связан с электромагнитами распределителей 6 и 11 (эти связи условно не показаны), а также с датчиком 15 обратной связи, реагирующим на перемещения щтока 2.
Блок 14 формирования рабочих команд электрически связан с управляющей частью переключающего устройства 10.
Привод, изображенный на фиг. 2,
является вариантом и отличается от описанного только тем, что в нем использованы три цилиндра-дозатора 7, предназначенные для различных режимов работы привода. Дозаторы 7 различаются между собой объемом полости. Средний (по схеме
дозатор 7 имеет наибольшую полость и предназначен для питания гидроцилиндра 1 сравнительно большими дозами жидкости, когда необходимо ускоренное перемещение штока 2.
Левый дозатор 7 имеет меньший объем полости и используется при замедленных точных перемещениях штока 2.
Правый дозатор 7 с весьма малым объемом полости служит для программируемого набора давления, компенсации утечек при длительной выдержке под давлением и регулируемого сброса давления из цилиндра.
Соответственно количеству дозаторов увеличено и число переключающих устройств 10 (их также три), выполненных в данном
случае в виде гидрораспределителей. Каждому дозатору соответствует также свой блок 14 формирования рабочих команд. Кроме того, привод снабжен датчиком 16 давления, соединенным с вычислительным блоком 12 и осуществляющим обратную связь по давлению с программным устройством.
Привод работает следующим образом. В соответствии с циклом работы гидравлического пресса привод должен обеспечить быстрый подвод рабочего органа к заготовке, замедленное движение рабочего органа для деформации заготовки, высотой рабочего органа в конце деформации, медленный отвод рабочего органа после выстоя и ускоренный отвод рабочего органа в исходное положение. Весь цикл работы привода осуществляется в автоматическом режиме по программе, введенной в вычислительный блок 12 программного устройства.
Реализуя программу, вычислительный
блок 12 выдает сигнал на переключение золотника распределителя 6 из нейтрального положения в правое положение. В результате этого порщневая полость исполнительного гидроцилиндра 1 маQ гистралью 4 соединяется с напорной магистралью 3, а его штоковая полость магистралью 5 соединяется со сливом. Происходит ускоренное перемещение щтока 2.
Ускоренное перемещение штока 2 за5 канчивается по сигналу датчика 15 в вычислительный блок 12. В соответствии с программой блок 12 переводит привод на режим замедленного перемещения щтока 2.
Для этого по команде блока 12 золотник распределителя 6 возвращается в нейтральное положение, отключая тем самым гидроцилиндр 1 от прямого питания из напорной магистрали 3. Одновременно в правое положение переключается золотник распределителя И, давление жидкости напорной магистрали 3 подводится к переключающемуся устройству 10, а щтоковая полость цилиндра 1 соединяется со сливом. В то же время (по приходу сигнала от датчика 15) вычислительный блок 12 выдает команду на включение генератора 13 импульсов и дает задание блоку 14 на формирование рабочих команд. Генератор 13 начинает вырабатывать электрические импульсы с некоторой постоянной частотой, из которой блок 14 формирует команды в виде электрических сигналов заданной продолжительности. Когда такая команда поступает на электромагнит переключающего устройства 10, оно переключается в левое положение (от изображенного на фиг. 1). Тем самым левая полость дозатора подключается к напорной магистрали 3, а его правая полость сообщается с порщневой полостью исполнительного цилиндра 1. Порщень 8 под действием давления жидкости из напорной магистрали 3 перемещается из крайнего левого положения до упора 9 (это перемещение определяет маневровый объем дозатора). При этом находящаяся в правой полости дозатора 7 доза жидкости поршнем 8 нагнетается в поршневую полость цилиндра 1. Вслед за этим рабочий сигнал из блока 14 прекращается (закончилась его продолжительность) и возвратная пружина переводит переключающее устройство в правое положение (как изображено на фиг. 1). Теперь с напорной магистралью 3 соединяется правая полость дозатора 7, а левая (наполненная перед этим жидкостью) сообщается с поршневой полостью цилиндра 1. Поршень 8 перемещается в крайнее левое положение, вытесняя из левой полости следующую порцию жидкости в цилиндр 1. Далее на электромагнит переключающего устройства 10 с блока 14 поступает следующая команда и все повторяется - напорная магистраль 3 поочередно соединяется то с правой, то с левой полостью.
При каждой подаче команды порщень 8 соверщает ход туда и обратно, вытесняя последовательно одну за другой дозы жидкости в гндроцилиндр 1. При равномерной подаче команд происходит питание цилиндра 1 последовательно чередующимися дозами жидкости, в результате чего шток 2 перемещается мелкими дискретными шагами, каждый из которых эквивалеитен маневровому объему дозатора 7. Последовательносгь таких щагов сливается в практически непрерывное медленное движение щтока 2.
Упором 9 можно регулировать величину щага перемещения.
Скорость перемещения штока регистрируется связанным с ним датчиком 15 обратной связи и контролируется вычислительным блоком 12. В случае отклонения скорости перемещения щтока 2 от заданной программы блок 12 корректирует частоту выдачи команд блоком 14. Изменяется частота срабатываний переключающего устройства 10, что приводит к изменению количества доз жидкости, поступающих в единицу времени в порщневую полость цил«ндра 1. Соответственно изменяется скорость перемещения щтока 2.
При медленном движении щтока 2 происходит деформация заготовки рабочим органом пресса. Технологическая нагрузка на шток 2 возрастает и в конце хода достигает такой величины, что давление в поршневой полости цилиндра 1 сравнивается с давлением в напорной магистрали 3. В этом случае давление по обе стороны поршня 8 одинаковое, поэтому поршень 8 не будет перемещаться в цилиндре-дозаторе 7 (при любом положении переключающего устройства 10), шток 2 остановится. Так происходит необходимый по программе выстой рабочего органа. Рабочий ход на этом завершается.
После завершения рабочего хода режим работы привода перестраивается на обеспечение медленного отвода рабочего органа пресса от заготовки. Для этого вычислительный блок 12 выдает сигнал на переключение золотника гидрораспределителя 11 в левое положение. При этом напорная магистраль 3 подключается к штоковой полости гидроцилиндра 1, а переключающее устройство 10 соединяется со сливом. Начинается обратный ход штока 2. При этом переключающее устройство 10 по командам блока 14 попеременно подключает то одну, то другую полость дозатора 7 к поршневой полости цилиндра 1 и к сливу. Когда поршневая полость цилиндра 1 соединена, например, с левой полостью дозатора 7, а его правая полость - со сливом, порщень 8 усилием подпора жидкости, вытесняемой из порщневой полости цилиндра 1, перемещается вправо, доза жидкости из правой. полости дозатора 7 уходит на слив.
При переводе переключающего устройства 10 в другое положение жидкость из поршневой полости цилиндра 1, перемещая порщень 8 влево, заполняет правую полость дозатора 7, а из левой полости доза жидкости идет на слив. Таким образом, путем слива жидкости из порщневой полости цилиндра 1 небольшими дозами достигается замедленный обратный ход штока 2.
По окончании замедленного отвода штока 2 вычислительный блок 12 выдает
команду на перевод золотника распределителя 11 в нейтральное положение и перевод золотника распределителя 6 в левое положение. Напорная магистраль 3 соединяется со штоковой полостью цилиндра 1, а поршневая полость последнего соединяется со сливом. Осуществляется ускоренный возвратный ход штока 2 (без участия дозатора 7).
С окончанием возвратного хода цикл повторяется.
При необходимости внести изменения в описанный цикл достаточно набрать в вычислительном блоке 12 новую программу (кнопочнй набор). Каких-либо изменений в конструкции привода не требуется.
Расширение технологических возможностей привода рассмотрим на примере работы привода, изображенного на фиг. 2.
Порядок работы привода аналогичен описанному с той лишь разницей, что распределитель 6 включается в работу для перемещения штока 2 в наладочном режиме, а цикл ускоренного перемещения штока 2 осуществляется переключением золотника распределителя 11 вправо и включением в работу среднего (по схеме) блока 14 формирования рабочих команд, выполняющего функцию ускоренного перемещения. Шток 2 ускоренно перемещается с шагом, пропорциональным маневровому объему среднего цилиндра-дозатора 7, и со скоростью, определяемой частотой срабатывания среднего переключающего устройства 10.
После совершения ускоренного перемещения щтока 2 вычислительным блоком 12 выдается команда на отключение среднего блока 14 и включение в работу левого блока 14, выполняющего функции точных перемещений. В этом случае включается в работу и левое перемещающее устройство 10 (среднее переключающее устройство 10 не работает, находится в нейтральном положении). Гидравлическая емкость левого дозатора 7 меньше емкости среднего дозатора 7, поэтому перемещение штока 2 будет замедленным (при той же частоте команд), а точность перемещения (и останова) значительно выше, поскольку, чем меньше м.аневровый объем цилиндра-дозатора, тем меньше величина шагового перемещения штока 2 и, следовательно, меньше ошибка в перемещении.
В момент появления на штоке 2 технологической нагрузки (момент соприкосновения рабочего органа пресса с заготовкой) в работу включается правый блок 14, выполняющий функцию регулятора давления рабочей жидкости в поршневой полости исполнительного цилиндра 1. Начинает работать правое переключающее устройство 10, и маневровый объем правого дозатора 7 в виде мелких доз поступает в полость цилиндра 1. Маневровый объем правого дозатора 7 выбирается весьма малым, но достаточным для нормальной работы исполнительного цилиндра 1 в пределах от минимального до номинального давления напорной магистрали 3. Следует иметь в виду, что привод не является абсолютно жесткой системой, поскольку жидкость, заполняющая его, хотя и в незначительной степени, но сжимается, имеют место упругие деформации элементов пресса, трубопроводов. Следовательно, чтобы поддерживать давление в поршневой полости исполнительного цилиндра на номинальном уровне, например при выстое рабочего органа, необходимо закачивать в нее дополнительный объем жидкости, что и выполняет правый дозатор 7. За давлением в поршневой полости цилиндра 1 следит датчик 16, который сигнализирует в блок 12 об отклонениях давления от программы, а блок 12 в случае отклонения давления дает команду на включение правого дозатора 7.
Увеличением числа дозаторов, имеющих разную емкость доз, полезный эффект соответственно увеличивается.
Экономический эффект от внедрения изобретения обеспечивается за счет расширения номенклатуры прессуемых изделий и уменьшения эксплуатационных затрат, связанных с переналадкой пресса на другие режимы работы. иалп Hzm чапо /шн.
. 2 жЕк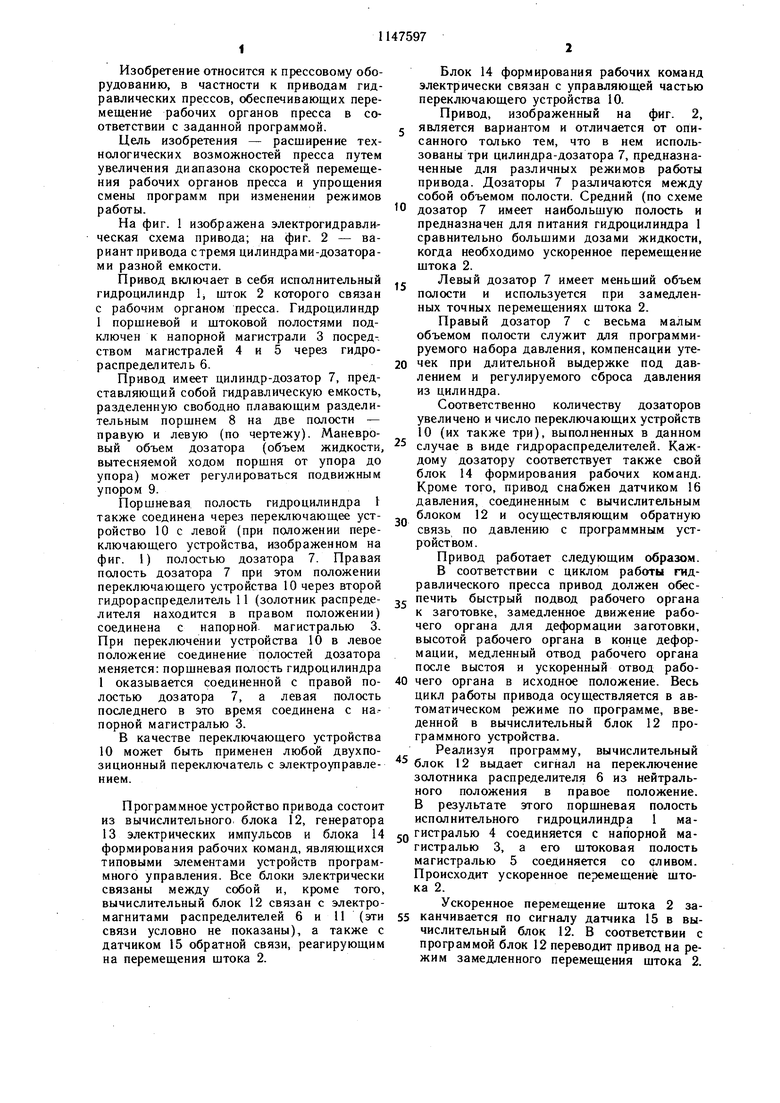

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПРЕССОВАНИЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ | 1994 |
|
RU2100191C1 |
| Литьевая машина | 1986 |
|
SU1361006A1 |
| Устройство для прессования изделий из порошковых материалов | 1983 |
|
SU1081002A1 |
| Гидравлическая тормозная система транспортного средства | 1979 |
|
SU919916A1 |
| Гидропривод | 1990 |
|
SU1809180A1 |
| Устройство для подачи ленточного материала в рабочую зону пресса | 1977 |
|
SU759183A1 |
| Система синхронизации штоков двух гидроцилиндров | 1976 |
|
SU754128A1 |
| Пневмогидравлический привод | 1979 |
|
SU821759A1 |
| Система управления гидравлическим прессом | 1982 |
|
SU1141019A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
ПРИВОД ГИДРАВЛИЧЕСКОГО ПРЕССА, содержащий исполнительный гидроцилиндр с поршневой и штоковой полостями, соединенными через распределитель с напорной магистралью и сливным баком, программное устройство для управления распределителем и цилиндр-дозатор с разделенными поршнем полостями, соединенными с двухпозиционным переключаюшим устройством, отличающийся тем, что, с целью расширения технологических возможностей пресса за счет увеличения диапазона скоростей рабочих органов, он снабжен датчиком перемещения плунжера исполнительного гидроцилиндра, а также дополнительным распределителем, подключенным своим входом к напорной магистрали, а выходами - к штоковой полости исполнительного гидроцилиндра и к входу двухпозиционного переключающего устройства, последнее другим своим входом соединено с рабочей полостью исполнительного гидроцилиндра, при этом упомянутое программное устройство своим входом связано с датчиком перемещения плунжера исполнительного гидроцилиндра, а своим выходом - с двухпозиционным переключающим устройством. О1 о 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система управления гидравлическим прессом | 1979 |
|
SU937232A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
