Предлагаемое устройсгв-о горедиазяачено для дистанционного диакретдаого перемещения рабочих органов.
Известно устройство для ди-оиретного леремещения рабочих органов, например, лильных сутпортов в круглопильных станках для продольной 1раапилов1ки лесоматериалов, содержащее ступенчатый гидроцилиддрнпозиционер с 1ПОД1ВИЖ|НЫ.МИ 1пор:ш,нями, ги.д ропанель с элект ро,магнит,ными золотниками, управляющими положением отдельных порщней позиционера, и клавишный пульт управления.
Цель изобретения - павышение надежности действия И упрощения ои стемы.
Достигается это тем, что устройство выполнено с диодной матрицей и несколькими реле, число которых равно числу подвиждых порщ«ей гидроцили.ндра-позиционера, осуществляющими перевод наб|ра:нного размера из десятичной си1стемы счисления в двойную и запоминающими заданное положение рабочего органа.
С целью автоматического Сброса ранее набранной илформации одновремеЕно с вводом «ОБОЙ, устройство выполнено с домолнительными реле обратного кода, размыкающие конTaiKTbi (Которых В ключены последовательно с конта1ктамч основных реле, управляющими включением элект1ромалнитов и запоминающими заданное положение рабочего органа.
Кроме того, выходной щток от р цилиндрапозиционера может быть связан с перемещаемым рабочим органом посредством масщтабного, например, рычажного, механизма увеличения хода.
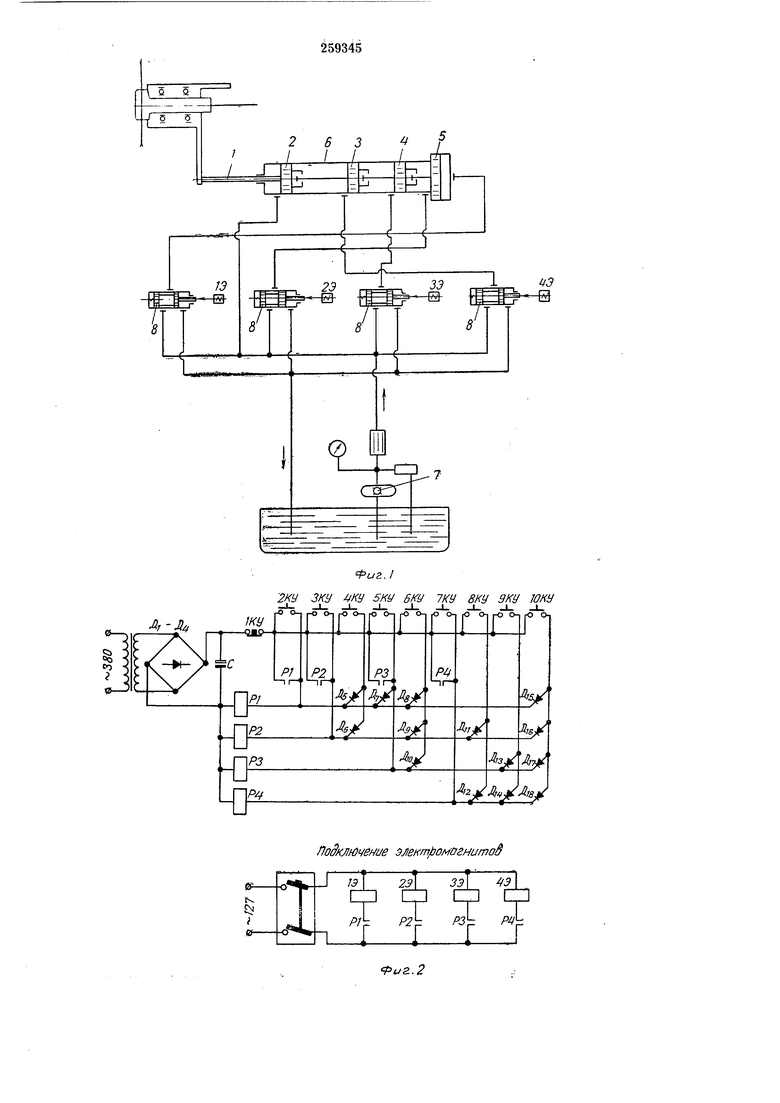
На фИГ. 1 показала гидравлическая схема описываемого устройства; па фиг. 2 - его электрическая схема; на фиг. 3 - его гидрокияематичеакая схема.
Ступенчатый гидродилиндр (-позицио-нер), выходной шток 1 которого жестко связан с перемещаемым рабочим органом, выполнен в виде нескольких последовательно установленных поршней 2-5, расположенных в общем
корпусе 6. Крайний поршень 2 жестко связан с выходным штоком позиционера. Ход каждого порщня кратен минимальному шагу перемещения, ход первого порЩНя равен единичному шагу, а ход каждого последующего
поршня вдвое больше хода предыдущего и ограничивается его штоком.
Гидросистема питается от лопастного насоса 7. Штоковая полость позиционера соединена с напорной магистралью, благодаря чему каждый из поршней позиционера имеет всего два устойчивых состояния в зависимости от того, соединена полость позиционера с давлением или со сливом. Ход штока позиционера складывается из суммы ходов отдельаицианером аводится :к подаче суммы ооответствующих -команд Б а электромагниты 1Э-4Э Д(вух1пози1цион«ых трехходовых золотников 8, числе которых равно числу подвижных поршней. При обесточенном состоя НИ1И iBicex электромагнитов (рабочая л ид«ость одновременно IBO все яоршневые оолости позиционера и вытесняет из его штоковой полости, что соответствует наибольшему ходу штока, равному сумме ходов .всех отдельных поршней. Все последуюш:ие положения штока .могут быть получены путем включения определенной комбинации электромагнитов двухпозиционных золотников 8. Управление положением рабочего органа с суш;аствляется с клавишмого пульта (фиг. 2), содержащего клавиши или кнопки //(У- 10К.У с замыкающими контактами. Нажапию каждой клавиши соответствует определенная комбинация включенных реле и управляемых ими электромагнитов золотников, что обеспечивается схемой числового управления, состоящей из выпрямителя (на диодах ), диодиой матрицы (сетки) из полуцроводниковых ДИ.ОДОВ Да-Д18 и четырех реле Р1-Р4 постоянного тока. Замыкающие контакты реле PI-Р4 находятся в силовой цепи переменного тока и управляют электромапнитами 1Э-4Э аолотников. С помощью диодиой матрицы и реле постоянного тока вводимая информация преобразуется из десятичной системы ючисления в двоичную (в двоичный -код) и запоминается благодаря дополнительным замыкающим контактам реле. На фиг. 3 показана гидрокинематическая схема устройства диок|ретного перемещения пилы в круглопильных обрезных станках, в котором исполнительным .органом является позиционер с пятью подвижными 1поршнями 2. Связь (ВЫХОДНОГО штока 1 с пильным суппортом 9 осушйствляется через рычажный механизм 10. Предмет изобретения 1.Устройство для дискретного яер1емещения рабочих органов, например пильных суппортов в круглапильных станках для адродольной распиловки лесоматериалов, содержащее ступенчатый гидроцилиндр-позиционер с подвижными-поршнями, гидропанель с электромагнитными золотниками, управляющими положение.м отдельных поршней -позиционера, и клавишный пульт управления, отличающееся тем, что, с целью повышения надежно.сти действия и упрощения системы, устройство вылолнено с диодной матрицей и несколькими -реле, число которых равно числу подвижных поршней гидроцилиндра-позиционера, осуществляющими перевод набранного размера из десятичной системы счисления в двоичную и запоминающими за.данное (положение рабочего органа. 2.Устройство по 1п. 1, отличающееся тем, что, с целью автоматического сб-роса ранее набранной информации одновременно с вводом новой, оно выпол нено с дополнительными реле обратного кода, размыкающие контакты которых включены последовательно с контактами основных реле, управляющими включением эл-ектромагнитов и запоминающими задамное шоложение рабочего органа. 3.Устройство по п. 1, отличающееся тем, что выходной щток гидроцилиндра-позиционера связан 1C перемещаемым рабочим органом посредством масщтабного, например рычажного, механизма увеличения хода. 2НУ ЗКУ КУ 5КУ 7КУ 8НУ 9КУ ЮКУ
Л-Л
Риг. 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ И УСТАНОВКИ ПИЛ | 1971 |
|
SU315594A1 |
| Устройство для дискретного позиционирования рабочих органов | 1981 |
|
SU954215A1 |
| УСТРОЙСТВО для СВАРКИ ЭЛЕКТРОЗАКЛЕПКАМИ | 1966 |
|
SU182267A1 |
| ГИДРОПРИВОД НАЖИМНОГО ОРГАНА СТАНКА ДЛЯ НАКАТКИ ПОВЕРХНОСТИ ДЕТАЛЕЙ | 1969 |
|
SU234083A1 |
| Моечная машина для вагонов | 1961 |
|
SU140454A1 |
| МЕХАНИЗМ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО ПРЕСЕЛЕКТИВНОГО | 1965 |
|
SU176175A1 |
| ПАТ-НТШ-ТГХШНЕОШБИБЛИОТЕКА | 1972 |
|
SU334051A1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1972 |
|
SU414083A1 |
| Гидравлический пресс | 1977 |
|
SU737242A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU368418A1 |

ЛодклЮ еме элект ЬомогиитоЗ
