(54) УСТРОЙСТВО ДЛЯ ДИСКРЕТНОГО ПОЗИЦИОНИРОВАНИЯ
РАБОЧИХ ОРГАНОВ
1
Изобретение относится к деревообрабатывающему машиностроению и может быть использовано для создания позиционных гидроприводов и систем управления ими в дерево- и лесо-обрабатывающем оборудовании.
Известно устройство для дискретного позиционирования рабочих органов, включающее выполненный в виде гидропозиционера привод перемещения рабочего органа, гидрораспределители с электромагнитным управлением и электрическую систему управления с имеющим выходные реле щифратором и кнопками управления 1.
Данное устройство обладает недостаточно высокой разрешающей способностью, обусловленной относительно малым число дискретных положений выходного щтока гидропозиционера и, как следствие, недостаточно высокой точностью позиционирования.
Цель изобретения - повышение разрешающей способности, точности позиционирования и удобства эксплуатации.
Указанная цель достигается тем, что система управления снабжена дополнительными шифраторами, величины ходов поршней гидропозиционера кратны числам двоично-десятичного взвешенного кода и образуют тетрады десятичных разрядов, каждому из которых соответствует отдельный шифратор десятичного кода в двоично-десятичный взвешенный код.
5На фиг. 1 показана принципиальная гидрокинематическая схема устройства; на фиг. 2 - принципиальная электрическая схема устройства применительно к гидропозиционеру, содержащему восемь поршней.
10Гидропозиционер представляет собой
стальную гильзу, в которой последовательно и соосно расположены подвижные поршни 1-8, взаимосвязанные ограничителями ходов: ход каждого последующего поршня ограничивается штоком предыдущего. Выходной шток 9 позиционера жестко связан с перемещаемым рабочим органом 10.
Ходы поршней выбраны кратными числами двоично-десятичного взвешенного кода с «весами ai l; 02 2; аз 2 и а4 4,
20 причем сумма этих чисел равна 9.
Первые четыре порщня (1, 2, 3 и 4) образуют тетраду младщего разряда, например единиц. При этбм ходы поршней будут соответственно равны: первого 1 мм.
второго - 2 мм, третьего - 2 мм и четверjoro - 4 мм, а их суммарный ход 1 + 2 + + 2 + 4 9 мм, что позволяет запрограммировать любое перемещение от 1 до 9 мм с дискретностью в 1 мм.
Следующие четыре порщия выполнены с ходами 10, 20, 20 и 40 мм (т.е. ход каждого из них в 10 раз больще хода соответствующего поршня предыдущего разряда) и образуют (в нащем примере) тетраду десятков. Суммарный ход этих четырех порщней равен 90 мм (10 + 20+20 + 40 90), что позволяет запрограммировать любые перемещения в диапазоне от 10 до 90 мм.
Штоковая полость позиционера постоянно соединяется с напорной линией 11 гидросистемы, питаемой насосом 12 постоянной производительности.
Полости отдельных поршней могут соединяться с напорной 11 или сливной 13 линиями гидросистемы посредством двухпозиционных гидрораспределителей 14 с управлением от электромагнитов Эм1 - Эм 8 (номер электромагнита соответствует номеру поршня гидропозиционера).
В зависимости от состояния электромагнита двухпозиционного гидрораспределителя соответствующий поршень занимает одно из двух устойчивых положений, отличающихся на величину хода. При включении электромагнита (кодовая команда «1) полость соединяется с давлением и соответствующий порщень выдвигается на величину своего хода. Если электромагнит обесточен (кодовая команда «О), то соответствующая полость соединяется со сливной линией гидросистемы и поршень втягивается.
Ход выходного щтока -позиционера, выполненного заодно целое с последним порщнем, складывается из суммы ходов отдельных поршней и может быть представлен выражением у Y d; (X, , lO) ,
где Yo - величина хода порщня младшего разряда или разрешающая способ ность позиционера; а-, (1, 2, 2, 4) - вектор, кодирующий веса ходов отдельных поршней
позиционера;
Х(,Х2 Векторы состояний двухпозиционных гидрораспределителей соответственно разрядов единиц и десятков (принимают значения О или 1).
При необходимости расширения диапазона перемещений гидропозиционер должен быть дополнен одним или несколькими (до четырех) поршнями с ходами, кратными 10 мм (т.е. разряда сотен).
Благодаря принятому построению ходов поршней величина перемещения выходного звена (щтока) позиционера может задаваться поразрядно в обычной десятичной системе счисления.
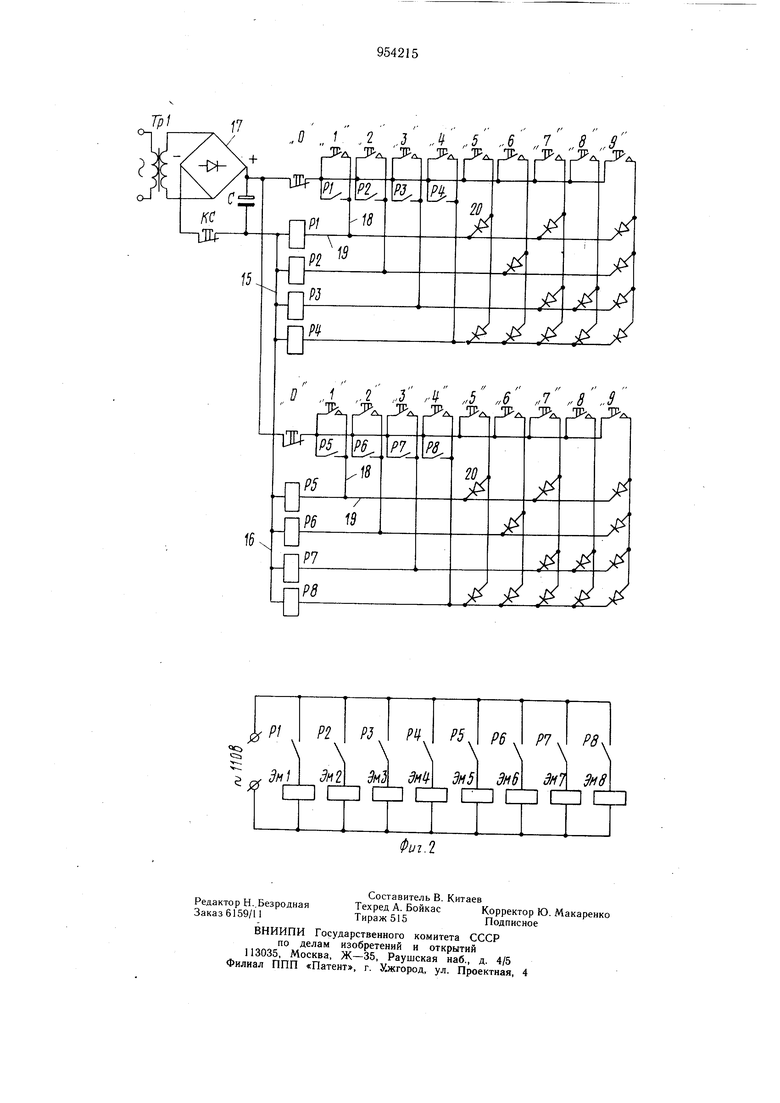
Устройство задания величины перемещения (фиг. 2) состоит из двух одинаковых шифраторов десятичного кода в двоичнодесятичный, выполненных, например, в виде 5 диодных матриц 15 и 16, подключаемых к общему источнику постоянного тока - выпрямителю 17. Каждая матрица состоит из девяти или десяти вертикальных шин 18, к которым подключаются замыкающие контакты кнопок «1 - «9 управления, соответствующих значащим цифрам от 1 до 9 (кнопка «О подключается без шины), и четырех горизонтальных (выходных) шин 19, к которым подключаются катущки электромагнитных реле Р1 - Р4 (разряда единиц) или Р5 - Р8 (разряда десятков). Для исключения ложных срабатываний
вертикальные щины, начиная с пятой, соединяются с горизонтальными посредством полупроводниковых диодов (вентилей) 20.
Шифратор единиц (матрица 15) служит 0 для ввода (задания) единиц величины перемещения щифратор десятков (матрица 16) для задания десятков.
Замыкающие контакты .реле Р1 - Р8 находятся в силовой цепи и коммутируют катущки электромагнитов соответствующих гидрораспределителей.
Устройство работает следующим образом.
Например, необходимо переместить рабочий орган в позицию, соответствующую Q координате xj 95 относительно выбранного начала отсчета (Х 0). Для этого оператор (предварительно сбросив ранее набранную информацию нажатием на кнопку КС) нажимает на кнопку «9 в разряде десятков (на матрице 16) и кнопку «5 на 5 матрице азряда единиц. При этом сработают и встанут на самоблокировку реле Р1 и Р4 младщего разряда (условно названного разрядом e) и реле Р5, Р6, Р7 и Р8 разряда десятков.
В результате сработают электромагниты Эм1, Эм4, Эм5, Эмб, Эм7 и Эм8 и рабочая жидкость поступит в полости соответствующих порщней 1, 4, 5, 6, 7, 8 гидропозиционера. При этом шток позиционера переместится в положение, определяемое суммой ходов 5 перечисленных выше порщней
3 1 + 4 + 10 + 20 + 20 + 40 95,0мм
Для сброса информации в каком-либо разряде оператору достаточно нажать кнопку, соответствующую цифре «О, При этом разрывается цепь питания матрицы и все реле данного разряда обесточиваются.
Для сброса информации во всех разрядах одновременно служит кнопка КС, при нажатии на которую разрывается цепь питания всех матриц.
Принцип работы устройства не изменится, если применить более совершенные двухпозиционные гидрораспределители с двумя электромагнитами по краям, а вместо обычных реле - двухобмоточные с магнитным самоудержанием контактов.
Разрешающая способность и точность позиционирования в предлагаемом устройстве повышаются благодаря тому, что ход поршня младшего разряда Уо может быть выполнен достаточно малым (например 0,1 или 0,5 мм) без увеличения габаритов позиционера в целом (так как ходы поршней тетрады младшего разряда не зависят от ходов поршней старших разрядов).
Удобство эксплуатации достигнуто благодаря тому, что ввод размера осуществляется поразрядно, в привычной для оператора десятичной системе счисления, путем нажатия одной из десяти кнопок в каждом разряде вводимого числа. Формула изобретения .. „ Устройство для дискретного позиционирования рабочих органов, включающее вы- 20
полненный в виде гидропозиционера привод перемещения рабочего органа, гидрораспределители с электромагнитным управлением и электрическую систему управления с имеющим выходные реле шифратором и
кнопками управления, отличающееся тем, что, с целью повышения разрешающей способности, точности позиционирования и удобства эксплуатации, система управления снабжена дополнительными шифраторами, величины ходов поршней гидропозиционера кратны числам двоично-десятичного взвешенного кода и образуют тетрады десятичных разрядов, каждому из которых соответствует отдельный шифратор десятичного кода в двоично-десятичный взвешенный
°ЛИсточники информации, принятые во внимание при экспертизе 1- Авторское свидетельство СССР № 414083, кл. В 27 В 5/00 1972 (поо тотип).
с,
3м П dnj М дм1 дн5 дн6 дн7 3м8
с (7) I--I I-I I I 1-1 I-. I ч I1-J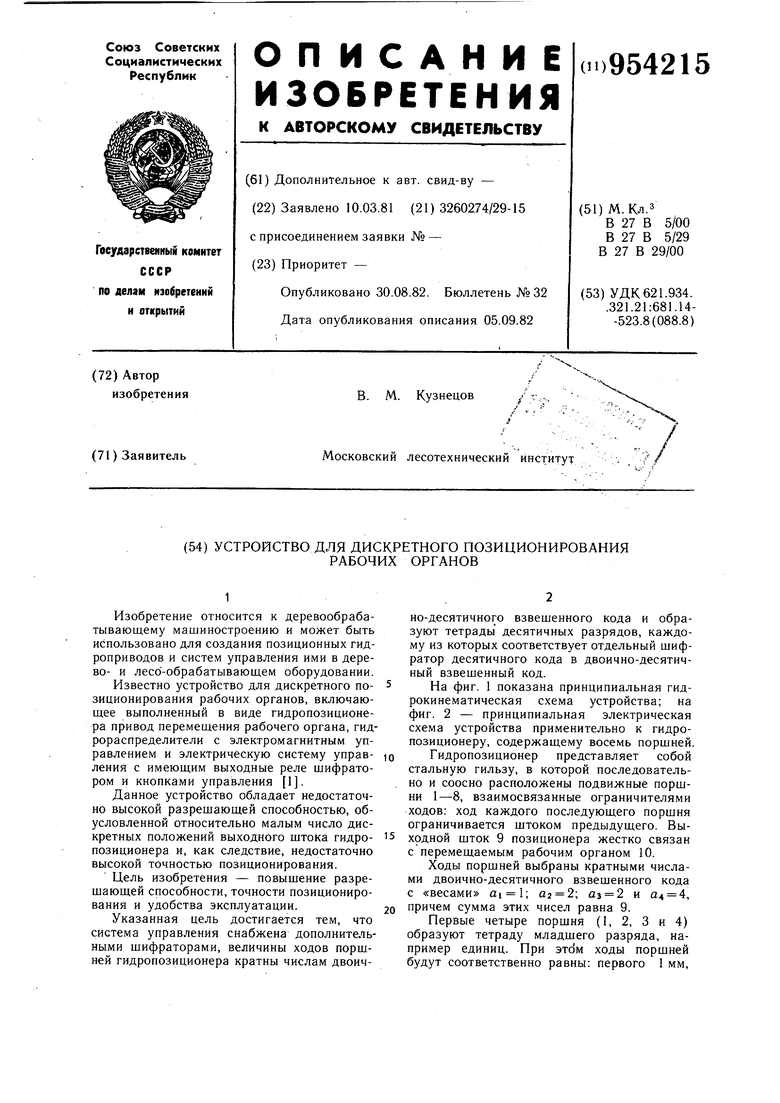

| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный привод рабочего органа деревообрабатывающего станка | 1985 |
|
SU1253776A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ И УСТАНОВКИ ПИЛ | 1971 |
|
SU315594A1 |
| УСТРОЙСТВО для ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1970 |
|
SU259345A1 |
| Устройство к однопериодному перфоратору для запоминания набираемых чисел | 1958 |
|
SU119733A1 |
| Преобразователь двоичного кода в двоично-десятичный | 1987 |
|
SU1448412A1 |
| Преобразователь двоичного кода в двоично-десятичный | 1985 |
|
SU1330762A1 |
| Цифровой пневмогидравлический привод | 1980 |
|
SU920275A1 |
| Устройство для преобразования кодов | 1977 |
|
SU744544A1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОГО ПЕРЕМЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1972 |
|
SU414083A1 |
| СПОСОБ И УСТРОЙСТВО УМНОЖЕНИЯ ДВОИЧНО-ДЕСЯТИЧНЫХ КОДОВ | 2008 |
|
RU2386998C1 |