Изобретение относится к моменто- измерителыгой технике и может бы ть использовано при градуировке и поверке моментомеров.
(ел.ъю изобретемгя являетс т: сокращение времени иоверкНз обеспечение возможности автоматизации и повышения топкости поверочных работ.
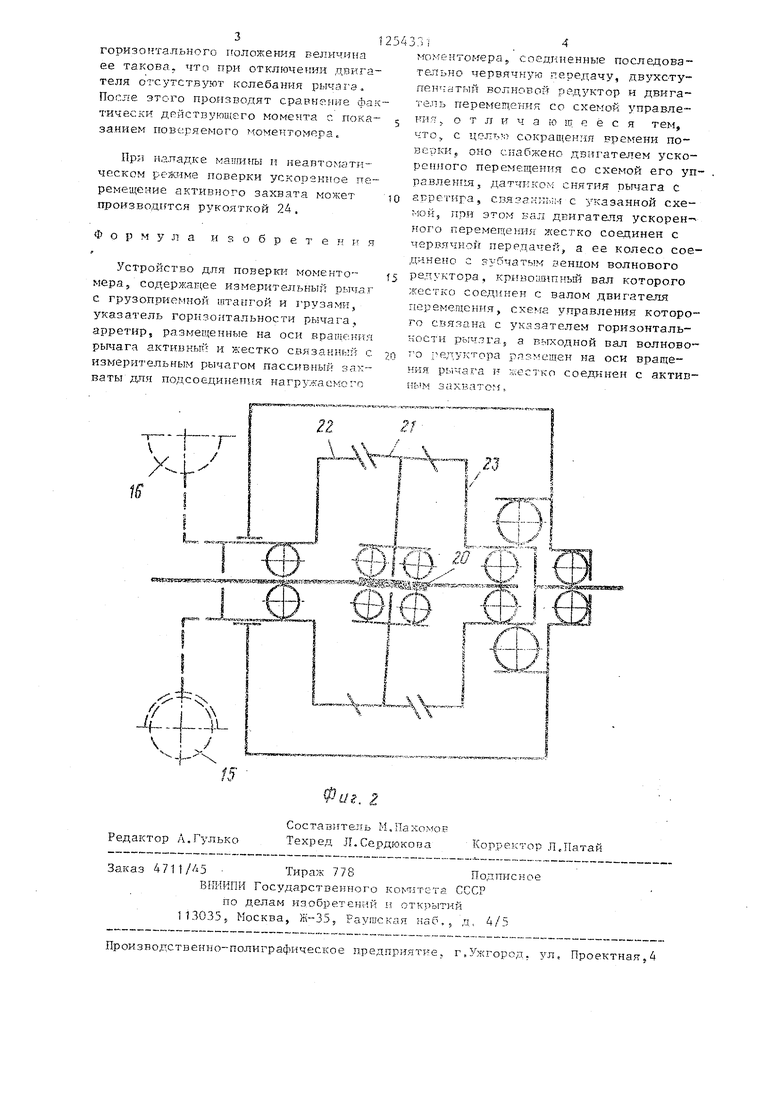
На фиг,1 изображена схема устройства , на фиг, 2 - схема двухступенчатого волнового редуктора.
Устройство содерясит измерительный рьргаг 1 с пассивным захватом 2, размещенным на оси вращенил рычага, указатель горизонтальности З грузоприем- и.ггаигу 4с чашкой 5 и грузаг-ш 6, основание 7, арретир 8, датчики по- ложения рычага 9,. датчик 10 снятия рычага с арретира, двигатель перемещения 11 со схемой управления 12, двигатель ускоренного перемещения 13 со управления 14, червяк 15, червячное колесо Ib, волгновой редуктор 17, выходной вал которого соединен с активным захватом 18, :iTOBep5i емый моментомер 19, который закрепляется мелзду naccHBSibiM 2 и активныг« 18 захватами,
Волновой редуктор содержит кри-- вошипный вал 20 с наклонной шейкой, установленным на этой шейке зyбчaты блоком 21 с . коническими зубьями,, зубчатым колесом 22 и зубчатым колесом 23 с выходным валом. Д.ПЯ ручного привода слу;кит рукоятка 24.
Устройство работает следую цим образом.
При наложении грузов б на чашку 5 и грузоприемкую штангу i рычаг 1 отклоняется от горизо1 тального положения и ложится на арретир 8 к .датчик снятия рычага с арретира 10, Воздействия 1 на арретир 8 и датчик 10 зависит от величины воспроизводимого ма11п-1ной крутяи(е;го момента, при этом датчик 10 вьфабаты- вает сигнал,, поступаюгций на схему управления 14, которая регулирует работой двигателя ycKopeinioro переме- 13, а дат пши положения га 9 вырабатывают сигнал., поступающий на схем у управления 12, управляющую работой двигателя перемещения 1 1.
Движение от вала двигателя ускоренного перемещения 13, жестко связанного с червяком 15, передается на червячное колесо 16, совмещенное с
1254331 И
зз бчатым колесом 22 волнового двухступенчатого конического с внутренним зацеплением редуктора. Зубчатое колесо 22, взаимодействуя с зубча- 5 тым блоком 21, передает усилие на зубчатое колесо 23 и активный .захват 18.
Движение от вала двигателя перемещения 11, жестко связанного с
10
шипньц-. валом 20, редуктора 17, передается зубчатому блоку 21, который совершает сферическое движение на наклонной шейке вала 20, передавая за счет разности чисел зуб.ев усилх е на колеса 22 и 23, при этом медленное .движение от двигателя перемещения 11 передается только на зубчатое колесо 23 и активный захват 18. Скорость этого движения равна уч ловой скорости деформирования и не превышает (2-50)-10 рад/с.
Так.им образом, если рычаг 1 воздействует на арретир 8 и датчик 10, активный захват 18 перемещается со
20
30
35
,cJ(t)
скоростью, определяемой по формуле .0 Ч+ k,,-eJ(e),
где Ц- iiJ - передаточное отношение червячной пары 1-5 угловая скорость вращения двигателя ускоренного перемещения 13; .передаточ1-5ое отношение волнового редуктора и угловая скорость вращения двигате.яя перег ге- прения 11,
и выборка зазоров в активном 18 и 40 пассивном 2 захватах и редукторе производится с повышенной, ускоренной скоростью. После выборки зазоров усилие от активного захвата 18 передается дефорьдаруя поверяеь-ш1й момен- 35 томер 19, на рьтаг 1,
Воздействие рычага 1 на арретир 8 и датчик 10 уменьп ается, при равенстве нулю усилия на датчик 10 он вырабатывает сигнал, который через схе- 50 му травления 14 отключает двигатель 13 ускоренного перемещения, дальнейшее деформирование поверяемого мо- ментомзра производит двигатель пере- гчещения 11, По мере прибл5гжения ры-- 55 чага 1 к горизонталтьном-у положению сигнал управления с датчиков 9 уменьшается, скорость деформирования уменьшается и при достижении рычагом
Движение от вала двигателя перемещения 11, жестко связанного с
10
шипньц-. валом 20, редуктора 17, передается зубчатому блоку 21, который совершает сферическое движение на наклонной шейке вала 20, передавая за счет разности чисел зуб.ев усилх е на колеса 22 и 23, при этом медленное .движение от двигателя перемещения 11 передается только на зубчатое колесо 23 и активный захват 18. Скорость этого движения равна уч ловой скорости деформирования и не превышает (2-50)-10 рад/с.
Так.им образом, если рычаг 1 воздействует на арретир 8 и датчик 10, активный захват 18 перемещается со
0
5
,cJ(t)
скоростью, определяемой по формуле .0 Ч+ k,,-eJ(e),
где Ц- iiJ - передаточное отношение червячной пары 1-5 угловая скорость вращения двигателя ускоренного перемещения 13; .передаточ1-5ое отношение волнового редуктора и угловая скорость вращения двигате.яя перег ге- прения 11,
и выборка зазоров в активном 18 и 0 пассивном 2 захватах и редукторе производится с повышенной, ускоренной скоростью. После выборки зазоров усилие от активного захвата 18 передается дефорьдаруя поверяеь-ш1й момен- 5 томер 19, на рьтаг 1,
Воздействие рычага 1 на арретир 8 и датчик 10 уменьп ается, при равенстве нулю усилия на датчик 10 он вырабатывает сигнал, который через схе- 0 му травления 14 отключает двигатель 13 ускоренного перемещения, дальнейшее деформирование поверяемого мо- ментомзра производит двигатель пере- гчещения 11, По мере прибл5гжения ры-- 5 чага 1 к горизонталтьном-у положению сигнал управления с датчиков 9 уменьшается, скорость деформирования уменьшается и при достижении рычагом
горизонтального гюложе шя Е еличина ее такова, что при отключении двигателя отсутствуют солебания рычах э. После этого пролзводят сравнение фак тически действуюидего момента с показанием поверяемого момеитомера
Ирн наладке машины и неавтоматк- ческом реж.име поверки ускорэкиое перемещение активного захвата может- производится рукояткой 24.
Формул а
о б р е т е
Устройство для поверки г-томенто- мера, содер5 ;а)дее измерительный рычаг с грузоприемной штангой и грузами, указатель горизонтальности рычага, арретир, размещенные на оси врашения рычага активкьпг и жестко связанный с измерительным рычагом пассивный зак- ваты для подсоединения нагружаемого
5433;.
мо гентомера,, соединенные последовательно червячную передачу, двухступенчатый волновой редуктор и двигатель перемеп1:ения со схемой управле- - Fi-T: j, отличающееся тем, что., с целъ о сокрап(ення вреьтени поверки j оно снабжено двиг ателем ускоренного перемещения со схемой его управления, датчхгком снятия рычага с
)0 арретира, связаипь;:- с указанной схе- ;-юЙ5 при этом вал двигатеяя ускорен- кого перемещения жестко соединен с червячной передачей, а ее колесо соединено с зубчатым зепяом волнового
5 редуктора, кривошлпньй вал которо.го жестко соединен с валом двигатегш перемещения, схема управления которого связана с указателем горизонтальности рьгчзга, а вьп одной вал волново0 го редуктора р,тгл1ещен на оси вращения рычага и жестко соединен с актив- зaxвa ro i,,
. г
Редактор Л.Гулько
Составитв-ль MJlaxoxKJE Техред Л.Се рдю к о в а
Заказ 4711/45 - Тираж 778Подписное
ВМИИПИ Государственного кo 1iтe:тa СССР
по делам изобретений н открытий ПЗОЗЗ, Москва, Ж-ЗЗ Раушская наб,, д, 4/5
Производственно-полиграфическое предприятие, г,Улсгород. ул. Проектная,4
Корректор Л,Натай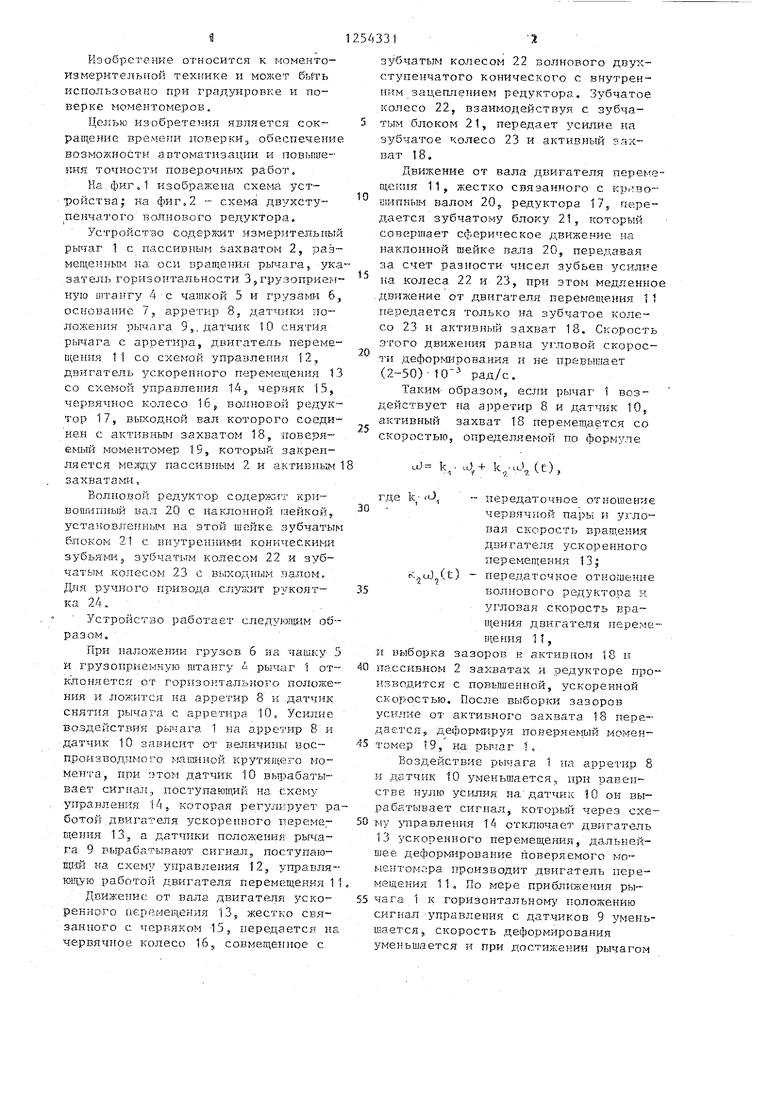
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ нагружения моментомеров и устройство для его осуществления | 1989 |
|
SU1631332A1 |
| Устройство для контроля работы счетных механизмов | 1988 |
|
SU1569855A1 |
| Стенд для испытаний подвижных элементов конструкций | 1978 |
|
SU688843A1 |
| Машина для динамических испытаний изделий на кручение Зуева и Вандышева | 1980 |
|
SU918817A1 |
| Моментомер | 1977 |
|
SU648858A1 |
| Стенд для испытаний подвижных элементов конструкций | 1983 |
|
SU1161835A1 |
| Устройство для измерения момента на валу | 1974 |
|
SU491844A1 |
| Арретирующее устройство | 1987 |
|
SU1472765A1 |
| СПОСОБ ПОВЕРКИ ПРИБОРОВ ИЗМЕРЕНИЯ СКОРОСТИ ВОЗДУШНОГО ПОТОКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2377613C1 |
| Способ градуировки моментомера и устройство для его реализации | 1981 |
|
SU1006946A1 |
Изобретение относится к моменто- измерительной технике и позволяет сократить время поверки. Рычаг 1 под действием грузов 6 отклоняется от горизонтального положения, воздействуя на арретир 8 и датчик 10 снятия рычага с арретира усилием, зависяпщм , от воспроизводимого устройством крутящего момента. Схема 14 управления по сигналу с датчика 10 регулирует работу двигателя 13 ускоренного перемещения, движение от вала которого через червяк 15, червячное колесо 16 и волновой двухступенчатый редуктор передается на активньй захват 18, так же как и медленное движение от двигателя 11 перемещения. В активном 18 и пассивном 2 захватах и редукторе производится выборка зазоров с. повышенной скоростью, после чего усилие от активного захвата 18 деформирует поверяемый моментомер 19.При нулевом усилии на датчик 10 со стороны рычага 1 двигатель 13 ускоренного перемещения отключается и деформирование поверяемого моментоме- ра производится двигателем 11 перемещения. После достижения рычагом 1 горизонтального положения сравнивают фактически действующий момент с показанием поверяемого моментомера 19. 2 ил. со оэ Ф1/г.1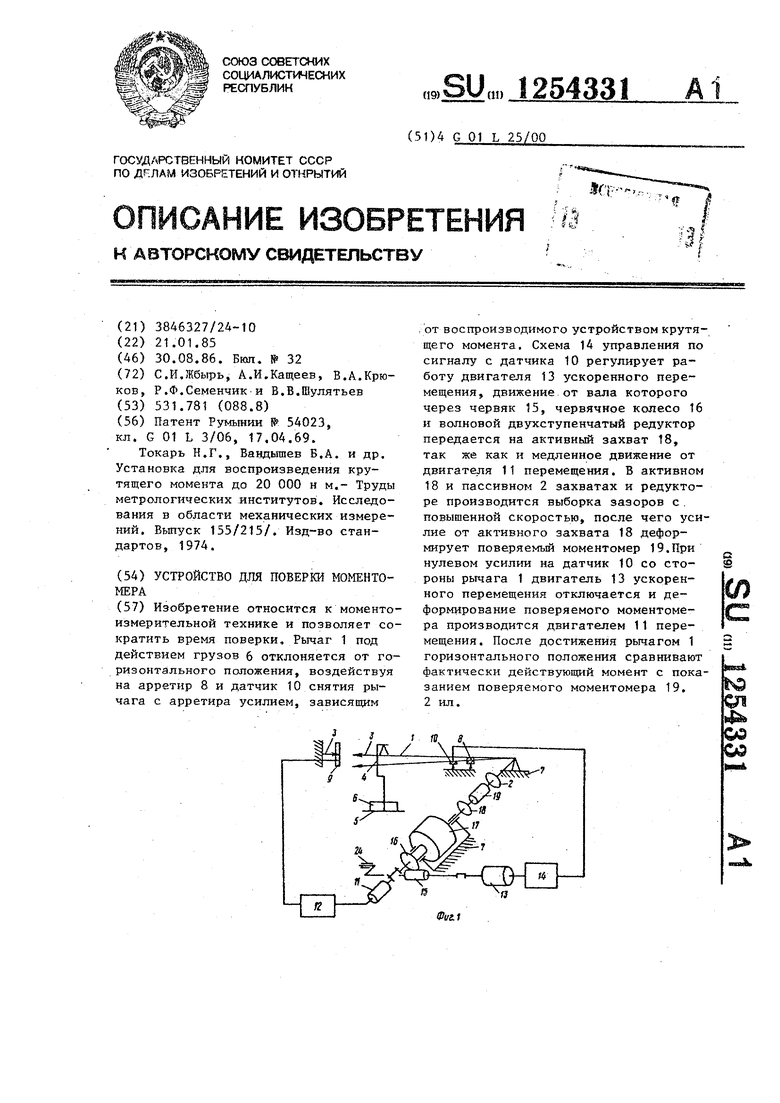
| Устройство для резки скрученного зеленого чайного листа | 1937 |
|
SU54023A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Токарь Н.Г., Вандышев Б.А | |||
| и др | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Исследования в области механических измерений | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| Изд-во стандартов, 1974. | |||
