гой стороны к упругому телу 9 жестко крепится внутренний фланец 13 с торцовым шпоночным пазом. Внутренний фланец 13 жестко крепится болтами 14 через кольцо 15 к выходному фланцу 16, имеющему торцовую шпонку. Передача момента между фланцами производится с помощью плавающего сухаря 17, расположенного между ними и входящего в зацепление с торцовыми шпонкой и пазом фланцев. Перемещение упругого тела 9 относительно фланца 16 выполняется с помощью четырех крепежных винтов 18.
Оси вращения поворотного рычага 3, захватов 5 и 6 и механизма 4 поворота лежат по оси 19 устройства 00. Устройство работает следующим образом.
Устанавливают поверяемый моменто- мер 8 в захваты 5 и 6 устройства и контролируют соосность захватов и поверяемого моментомера 8 при нагрузке, равной нулю. Нагружают моментомер, например, до верхнего предела измерений с помощью механизма задания силы и возврата поверяемого рычага 3 в горизонтальное положение механизмом поворота 4. Фиксируют показания моментомера 8 и показания индикаторов 12 узла контроля 7. По материалам аттестации узла 7 оценивают величины силовых возмущающих воздействий, существующих в тракте передачи крутящего момента. В соответствии с показаниями индикаторов 12 определяют величину и направление относительных перемещений .фланца 16 и упругого тела 9, необходимых для минимизации силовых возмущающих воздействий. Разгружают моментомер 8 с помощью механизма поворота 4. Освобождают внутренний фланец 13 с помощью болтов 14. Винтами 18 изменяют исходное положение оси захвата 5 в сторону уменьшения выявленных силовых возмущающих воздействий. Болтами 14 жестко крепят внутренний фланец 13 к фланцу 16. Нагружают моментомер 8, фиксируют его показания и показания индикаторов 12 узла контроля 7.Сравнивают показания моментомера и величины силовых возмущающих воздействий с полученными при предыдущем нагруже- нии. Повторяют перечисленные операции до достижения минимально возможных величин силовых возмущающих воздействий или отсутствия видимых изме
нений показаний поверяемого средства при выполняемых изменениях соосности. Использование изобретения позволяет контролировать и минимизировать возникающие в процессе воспроизведения крутящего момента на валу нагружаемого моментомера дополнительные силовые возмущающие воздействия боковые силы и изгибающие моменты.
Минимизация этих возмущений в процессе поверки обеспечивает уменьшение погрешности нагружения, т.е. повышение точности оценки метрологических
5 характеристик поверяемого или градуируемого моментомера, что обеспечивает повышение достоверности измерений крутящего момента поверяемых момен- томеров в процессе эксплуатации.
0
Формула изобретения
1. Способ нагружения моментомеров, заключающийся в том, что устанавлива- 5 ют моментомер в захваты машины для задания момента, контролируют соосность при нагрузке, равной нулю,нагружают и разгружают моментомер по заданной программе с фиксацией его покаQ заний на заданных ступенях нагружения, отличающийся тем, что, с целью уменьшения погрешности перед нагружением и разгружением моментомера по заданной программе,допол, нительно нагружают моментомер нагрузкой, равной его верхнему пределу измерений, фиксируют его показания и величины силовых возмущающих воздействий, разгружают моментомер, измеQ няют исходное положение оси одного
из захватов машины для задания момента в сторону уменьшения силовых возмущающих воздействий, затем повторно нагружают, фиксируют показания,срав5 нивают показания моментомера и величины силовых возмущающих воздействий с полученными при предыдущем нагруже- нии, разгружают моментомер и повторяют операции до достижения заранее заданных величин силовых возмущающих
50
55
воздействий.
2. Устройство для нагружения моментомеров, содержащее станину, расположенные на ней механизм поворота, поворотный рычаг, соединенный с ним механизм задания силы, два захвата для крепления нагружаемого момедтоме ра, первый из которых жестко связан с поворотным рычагом, при этом оси
вращения механитма поворота,поворотного рычага, механизма задания силы и захватов совпадают с осью устройства, отличающееся тем, что, с целью уменьшения погрешности, в него введены узел контроля и компенсации силовых возмущающих воздействий и узел для измерения перемещений, при этом узел контроля и компенсации силовых возмущающих воздействий состоит из упругого тела, на первом из концов которого жестко закреплен внутренний фланец,снабженный торцовым шпоночным пазом,расположенным перпендикулярно оси устройства, в который входит с возможностью перемещения и фиксации торцовая шпонка плавающего сухаря, на противоположной стороне которого перпендикулярно шпонке и оси устройства также выполнен торцовый и шпоночный паз, в который входит с возможностью перемещения и фиксации торцовая шпонка выходного фланца указанного узла, соединенная с механизмом поворота, а узел для измерения перемещений состоит из корпуса, снабженного зажимами для установки измерителей переме
оньюн, сщения одного конца упругого тела относительно другого, корпус жестко соединен с вторым концом упругого тела и вторым захватом, причем измерительные оси измерителей перемещения параллельны оси устройства.
3. Устройство по п.2, отличающееся тем, что, с целью
JQ удобства регулировки в выходном фланце узла контроля и компенсации силовых возмущающих воздействий, в него введены две пары крепежных винтов, крепежные болты и кольцо,при
15 этом плавающий сухарь выполнен с цилиндрической боковой поверхностью, а упругое тело снабжено цилиндрическими фланцами, крепежные винты установлены в выходном фланце так, что
20 их оси перпендикулярны оси устройства, торцовые поверхности первой пары крепежных винтов контактируют с цилиндрической поверхностью плавающего сухаря, а торцовые поверхности
25 второй пары контактируют с цилиндрической поверхностью первого фланца упругого тела, который соединен с выходным фланцем крепежными болтами через кольцо.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки моментомера и устройство для его реализации | 1981 |
|
SU1006946A1 |
| Машина для динамических испытаний изделий на кручение Зуева и Вандышева | 1980 |
|
SU918817A1 |
| МАШИНА СИЛОЗАДАЮЩАЯ (СИЛОИЗМЕРИТЕЛЬНАЯ) СЖАТИЯ ОБРАЗЦОВАЯ | 2011 |
|
RU2456565C1 |
| Устройство для поверки моментомера | 1985 |
|
SU1254331A1 |
| СПОСОБ СОЗДАНИЯ КОНТРОЛИРУЕМОЙ СИЛЫ ПРИ ПРОВЕРКЕ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530786C1 |
| СПОСОБ БЕЗГИРЕВОЙ ПОВЕРКИ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2246705C2 |
| Устройство для поверки моментных ключей | 1988 |
|
SU1545111A1 |
| Стенд для испытания торсионов | 2021 |
|
RU2755510C1 |
| СПОСОБ КАЛИБРОВКИ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777350C1 |
| Устройство для поверки динамометров и силоизмерительных датчиков | 1978 |
|
SU735943A1 |
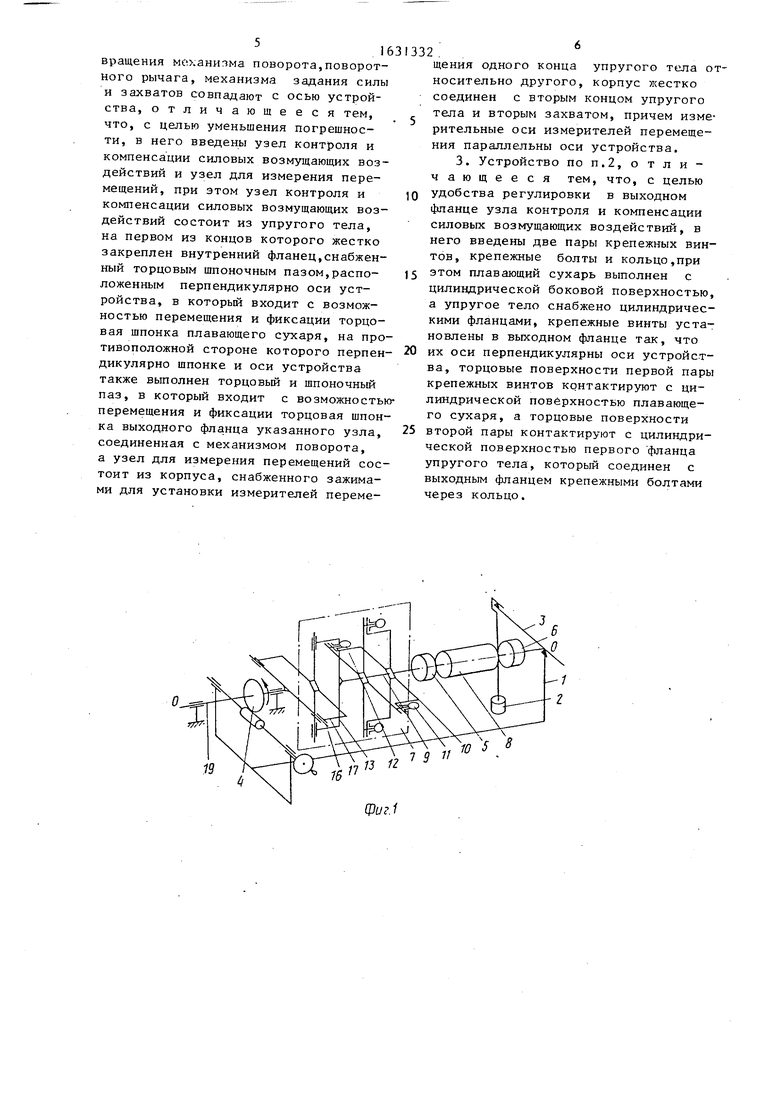
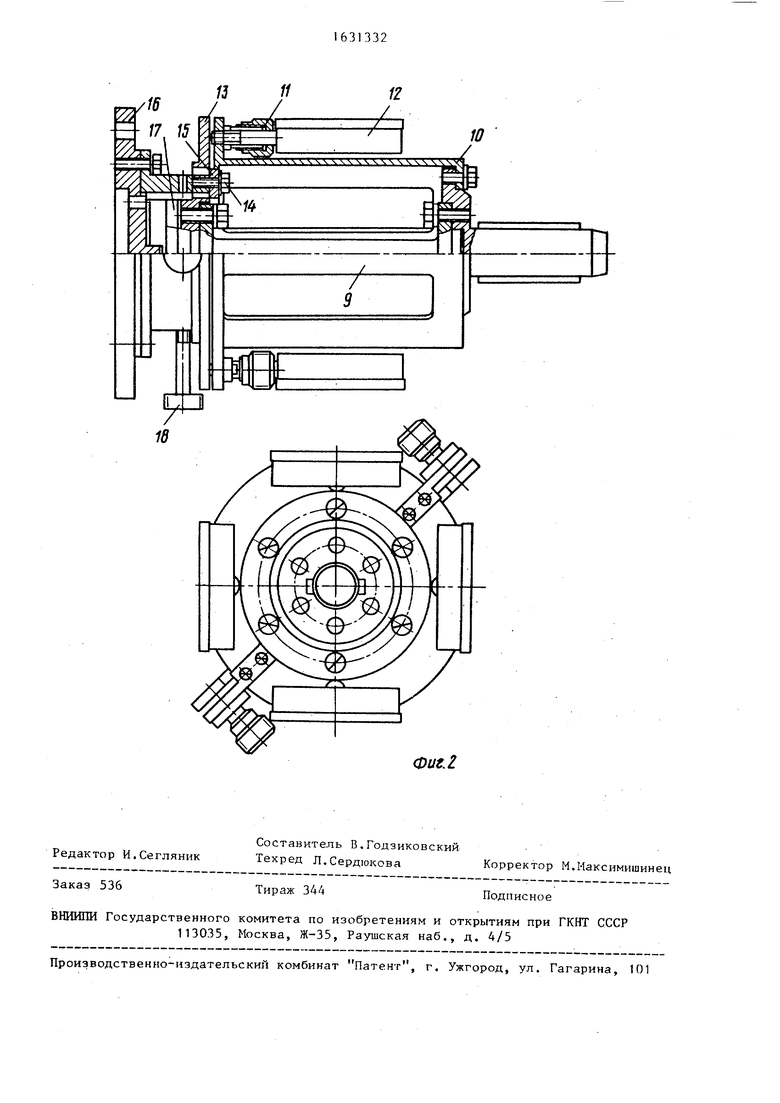
Изобретение относится к измерительной технике и предназначено для нагружения моментомеров при их поверке, градуировке и других испытательных операциях. Цель изобретения - уменьшение погрешности нагружения. Изобретение относится к измерительной технике и предназначено для нагружения моментомеров при их поверке, градуировке и других испытательных операциях. Цель изобретения - уменьшение погрешности. На фиг.1 представлена схема устройства, реализующего предлагаемый способ нагружения моментомеров; на фиг.2 - конструкция узла контроля и компенсации силовых и возмущающих воздействий. Цель достигается тем, что устанавливают нагружаемый моментомер 8 в захваты 5,6, контролируют их соосность, нагружают моментомер 3 до верхнего предела измерения с помощью механизма 2 задания силы и возвращают рычаг 3 в исходное положение с помощью механизма 4 поворота. Фиксируют показания моментомера 8 и показания индикаторов 12 узла 7 контроля. Далее определяют величину перемещений фланца 1 6 и упругого тела 9, необходимых для минимизации паразитных силовых воздействий в тракте момента. Разгружают моментомер 8 и регулируют положение оси захвата 5 так, чтобы уменьшить паразитные силовые воздействия. Затем повторяют перечисленные операции до минимизации паразитных силовых возмущающих воздействий,после чего приступают собственно к нагруже- нию моментомера 8. 2 с.п. и 1 з.п. ф-лы, 2 ил. Устройство (фиг.1) содержит станину 1 , механизм задания силы 2,поворотный рычаг 3, механизм поворота 4, захваты 5 и 6, узел 7 контроля и компенсации силовых возмущающих воздействий и поверяемый моментомер 8. Узел 7 контроля и компенсации силовых воздействий (фиг.1,2) содержит упругое тело 9. С одной стороны упругого тела 9 жестко закреплен корпус 10 с цанговыми зажимами 11 узла измерения перемещений для установки измерителей перемещения 12. С друSS (Л оэ со со со N3
19
10
/
Фиг. 2.
| Токарь Н.Г | |||
| и др | |||
| Станок для укладывания в порядке спичечных коробок | 1929 |
|
SU20000A1 |
| Исследования в области механических измерений | |||
| М.: Труды метрологических институтов СССР | |||
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| Моментомеры переносные образцовые | |||
| Методика поверки | |||
| Прибор для определения моментов инерции плоских фигур при повороте координатных осей | 1924 |
|
SU1470A1 |
| ГСИ | |||
| Свердловск, 1936, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
