Изобретение относится к системам автоматического управления и может быть использовано для стабилизации выхода нестационарного, преимущественно линейного объекта, подверженного влиянию помех.
Цель изобретения - повьшение точности стабилизации выхода нестационарного линейного объекта.
Введение дополнительных блоков и связей позволяет исключить разделение во времени режимов обучения и управления, так как не имеется мо- дели собственно объекта, а коэффициенты, связывающие отклонения возмущений с требуемым для их компенсации управляющим воздействием корректируются непосредственно, так, что выходная величина статистичес си не зависит от отклонений возмущений и на нее не влияют изменения параметров объекта управления.
Н фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2 поясняется принцип его работы.
Адаптивная система стабилизации выхода нестационарного линейного объекта состоит из объекта 1 управления, на входе которого действуют контролируемые возмущения (входные величины) x. ,Хг Ъ неконтчения выходной величины, к первому входу сумматора 10 и входу компаратора 11. Выход блока 9 вычисления текущего среднего значения выходной
5 величины соединен с вторым входом сумматора 10 и первым входом блока 12 коррекции управления,второй вход которого подключен к задатчику 13 выходной величины. Выход сумматора
10 10 подключен к входу управляемого запоминающего устройства (УЗУ) 14, осуществляющего запоминание отклонения выходного параметра от его текущего среднего значения,Управляю15 щий вход УЗУ 14 подключен к выходу компаратора 11, а выход - к первь1м входам блока 15 управляемых делителей, вторые входы которого подключены к выходам первого блока 4 сум20 маторов, а управляемые входы - к выходам блока 7 элементов И. Выход компаратора 11 соединен через блок 16 задержки с вторыми входами блока 7 элементов И. Выходы блока 15 уп25 равляемых делителей соединены со
входами блока 17 масштабных усилите лей с коэффициентами v- , выходы которого подключены к первым входам второго блока 18 сумматоров. Выходы
30 второго блока 18 сумматоров подключены к вторым входам блока 6 вычисления управлякщих воздействий и через блок 19 памяти к вторым своим входам. Блок 19 памяти предназначен
ролируемые возмущения 1,CN , i,,.Nl
,, , а на выходе бло-35 №« запоминания результатов, постука 2 измерения входных величин, выходы которого соединены с входами блока 3 вычисления текущих средних значений входных величин, выходы которого соединены с первыми входами первого блока 4 сумматоров, вторые входы которого соединены с выходами блока 2 измерения входных величин. Выходы первого блока 4 сумматоров соединены с входами блока 5 компараторов и информационными входами блока 6 вычисления управляинцих воздействий. Блок 5 компараторов настраивается так, что сигнал присутствует на каком-либо его выходе в том случае, если сигнал на соответствующем входе превьшает по абсолютной величине заданное значение отклонения воз40
45
50
пающих с второго блока 18 сумматоров, до прихода очередного значения возмущений (до очередного шага N ). Выход блока 12 коррекции соединен с третьим входом блока 6 вычисления управляюпщх воздействий, выход которого подключен к входу исполнительного устройства 20, выход которого связан с управляющим входом объекта 1 управления.
Так как для данного класса объектов колебания возмущений носят случайный характер и имеют ограниченный диапазон, то в общем случае статистическую зависимость выходной величины отконтролируемых возмущений можно выразить в дискретные моменты времени уравнением множественной регрессии. Для простоты рассмотрим одномерный объект. В этом случае
Так как для данного класса тов колебания возмущений носят чайный характер и имеют ограни диапазон, то в общем случае ст тическую зависимость выходной чины отконтролируемых возмущен можно выразить в дискретные мо времени уравнением множественн регрессии. Для простоты рассмо одномерный объект. В этом случ
мущений S; . Выходы блока 5 компараторов подключены к первым входам бло- 55
.... о уравнение регрессии имеет вид ка 7 элементов И. Измеритель 8 выход-
ной величины подключен к входу блока 9 вычисления текущего среднего знаLj N a + .
т
,
2544342
чения выходной величины, к первому входу сумматора 10 и входу компаратора 11. Выход блока 9 вычисления текущего среднего значения выходной
5 величины соединен с вторым входом сумматора 10 и первым входом блока 12 коррекции управления,второй вход которого подключен к задатчику 13 выходной величины. Выход сумматора
10 10 подключен к входу управляемого запоминающего устройства (УЗУ) 14, осуществляющего запоминание отклонения выходного параметра от его текущего среднего значения,Управляю15 щий вход УЗУ 14 подключен к выходу компаратора 11, а выход - к первь1м входам блока 15 управляемых делителей, вторые входы которого подключены к выходам первого блока 4 сум20 маторов, а управляемые входы - к выходам блока 7 элементов И. Выход компаратора 11 соединен через блок 16 задержки с вторыми входами блока 7 элементов И. Выходы блока 15 уп25 равляемых делителей соединены со
входами блока 17 масштабных усилителей с коэффициентами v- , выходы которого подключены к первым входам второго блока 18 сумматоров. Выходы
30 второго блока 18 сумматоров подключены к вторым входам блока 6 вычисления управлякщих воздействий и через блок 19 памяти к вторым своим входам. Блок 19 памяти предназначен
№« запоминания результатов, посту
пающих с второго блока 18 сумматоров, до прихода очередного значения возмущений (до очередного шага N ). Выход блока 12 коррекции соединен с третьим входом блока 6 вычисления управляюпщх воздействий, выход которого подключен к входу исполнительного устройства 20, выход которого связан с управляющим входом объекта 1 управления.
Так как для данного класса объектов колебания возмущений носят случайный характер и имеют ограниченный диапазон, то в общем случае статистическую зависимость выходной величины отконтролируемых возмущений можно выразить в дискретные моменты времени уравнением множественной регрессии. Для простоты рассмотрим одномерный объект. В этом случае
+ .
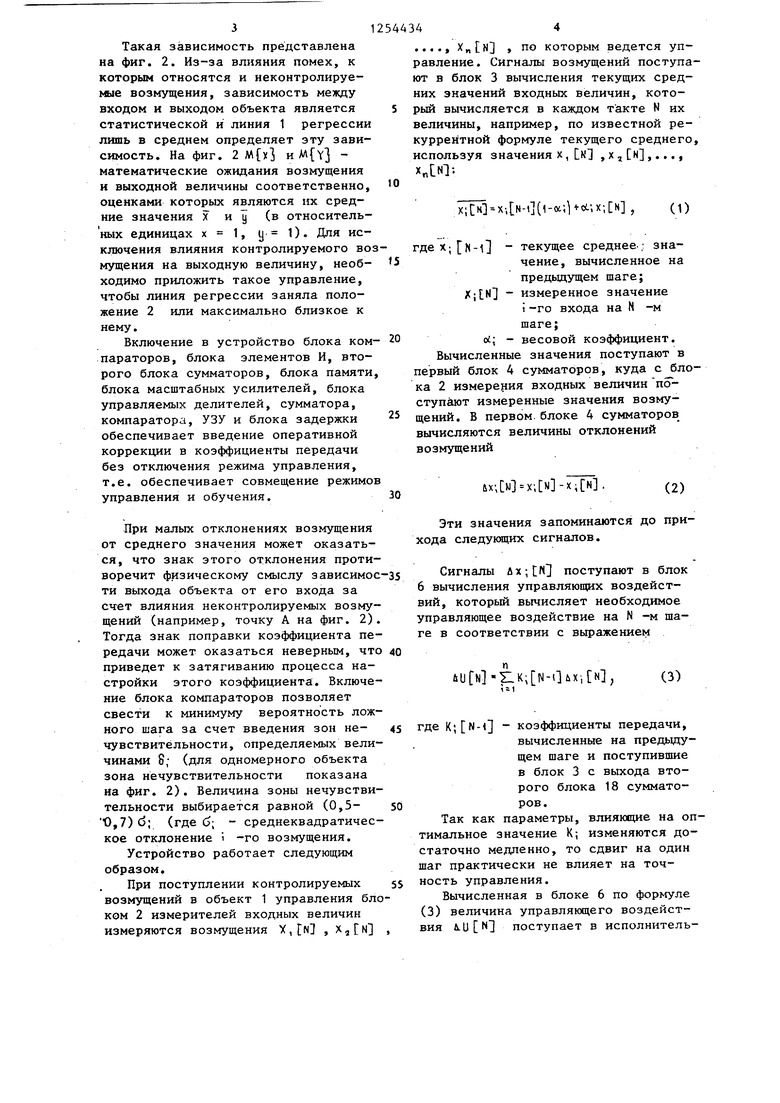
Такая зависимость представлена на фиг. 2. Из-за влияния помех, к которым относятся и неконтролируемые возмущения, зависимость между входом и выходом объекта является статистической и линия 1 регрессии лишь в среднем определяет эту зависимость. На фиг. 2 и M{Y - математические ожидания возмущения и выходной величины соответственно, оценками которых являются их средние значения х и (в относитель- ных единицах х 1, у 1). Для исключения влияния контролируемого возмущения на выходную величину, необ- ходимо приложить такое управление, чтобы линия регрессии заняла положение 2 или максимально близкое к нему.
Включение в устройство блока ком- параторов, блока элементов И, второго блока сумматоров, блока памяти, блока масштабных усилителей, блока управляемых делителей, сумматора, компаратора, УЗУ и блока задержки обеспечивает введение оперативной коррекции в коэффициенты передачи без отключения режима управления, т.е. обеспечивает совмещение режимов управления и обучения.
При малых отклонениях возмущения от среднего значения может оказаться, что знак этого отклонения противоречит физическому смыслу зависимос ти выхода объекта от его входа за счет влияния неконтролируемых возмущений (например, точку А на фиг. 2). Тогда знак поправки коэффициента передачи может оказаться неверным, что приведет к затягиванию процесса настройки этого коэффициента. Включение блока компараторов позволяет свести к минимуму вероятность ложного шага за счет введения зон не- чувствительности, определяемых величинами 8; (для одномерного объекта зона нечувствительности показана на фиг. 2). Величина зоны нечувствительности выбирается равной (0,5- t),7)d; (где б; - среднеквадратичес- кое отклонение i -го возмущения.
Устройство работает следующим образом.
При поступлении контролируемых возмущений в объект 1 управления блоком 2 измерителей входных величин измеряются возмущения V,N , x,N
..,., , по которым ведется управление. Сигналы возмущений поступают в блок 3 вычисления текущих средних значений входных величин, который вычисляется в каждом такте N их величины, например, по известной рекуррентной формуле текущего среднего, используя значения х, к ,х N,...,
xiCHi ((l-«0 oC;x-,N , (1)
где X; N- - текущее среднее-; значение, вычисленное на предыдущем шаге; X;tNl - измеренное значение I-го входа на N -м шаге;
oij - весовой коэффициент. Вычисленные значения поступают в первый блок 4 сумматоров, куда ка 2 измерения входных величин поступают измеренные значения возмущений. В первом.блоке 4 сумматоров вычисляются величины отклонений возмущений
Ьх;М .
(2)
Эти значения запоминаются до прихода следующих сигналов.
Сигналы поступают в блок 6 вычисления управляющих воздействий, который вычисляет необходимое управляющее воздействие на N -м шаге в соответствии с выражением
п uU N -IlK; N-ilbX-,N, (3)
где - коэффициенты передачи, вычисленные на предыдущем шаге и поступившие в блок 3 с выхода второго блока 18 сумматоров.
Так как параметры, влияющие на оптимальное значение К; изменяются достаточно медленно, то сдвиг на один шаг практически не влияет на точность управления.
Вычисленная в блоке 6 по формуле (3) величина управляющего воздействия поступает в исполнительS12
ное устройство 20, настраивающее объект управления.
Коррекция коэффициентов передачи ч К; N осуществляется дискретно сле- дуюощм образом.
Одновременно с приходом сигналов в блок 6 вычисления управляющих (х воздействий, они поступают в блок 15 управляемых делителей. Измеритель 8 выходной величины измеряет выходной параметр у. N . Сигнал ij N поступает в блок 9 вычисления текущего среднего значения и на первый вход сумматора 10, на второй вход которого при
ходит сигнал с блока 9, вычисленный .15 ты у , J соответственно.
Сигналы b,N а,Гм1 у, , bjM tN Jfj ,...., поступают во второй блок 18 сумматоров, где суммируются с запомненными блоком 19 20 памяти значениями коэффициентов
К; N-i3 вычисленными на предыдущем шаге, т.е.
в нем по формуле аналогичной формуле (1) .
i.K-i(-ot +«iyij Nl. (4)
Сумматор 10 вычисляет значение отклонения выхода от текущего среднего значения
iy N «y N}-ytNl.
25
40
К; N является новым значением Сигнал fcij tNl поступает в УЗУ 14. 1-го коэффициента передачи. С выхода УЗУ 14 запомненное значение Второй член выражения (6) - по- отклонения выходной величины прихо- , правка к предыдущему значению коэффи- дит на вторые входы блока 15 управляемых делителей, на первых входах которого уже присутствуют сигналы
Ax.tNl , .
Эти же сигналы присуствуют на первых входах блока 5 компараторов. На управляющих воздействий, вторые входы блока 5 компараторов заданы сигналы S, , 8 ,...., 5, определяюоще зону нечувствительности.
Каждый из компараторов блока 5 компараторов работает следующим образом.
Если на i -м входе присутствует сигнал АХ; НЗ , больший по абсолютному значению величины S; , то на f -м выходе, на первом i -м входе блока 7 элементов И также появляется сигнал. На второй i -и вход сигнал поступает с блока 16 задержки через время, необходимое для измерения и запоминания iyLN УЗУ 14. При наличии сигналов на двух л -х входах блока 7 элементов И «а его i -м выходе появляется сигнал, который поступает на i -и вход блока 15 управ- 55 12 коррекции управления, на другой лязмых делителей и разрешает деление вход которого подан задающий сигнал Лу LN на йх; М . На выходе получают результат деления:
SO
циента передачи, учитывающая изменение характеристик процесса.
Сигналы с выхода блока 4 сумматоров поступают в блок 6 вычисления
Сброс запомненного УЗУ 14 значения отклонения выходной величины fttf СмЗ осуществляется следующим образом.После измерения выходной величины на выходе компаратора 11, а значит и на управляющем входе УЗУ 14 сигнал исчезает, осуществляется сброс запомненного значения отклонения выходной величины и подготовка к запоминанию очередного значения отклонения выхода atjtN . Измеренное значение выхода поступает также в блок 9 вычисления текущего среднего значения выходной величины, кото- ,рый вычисляет текущее среднее значение выходной величины по формуле (4). Значениеу М поступает на вход блока
9о . ями
в соответствии с выражени
«
Если Ax;tN i6 то разрешающего сигнала в i -и делитель блока 15 не последует и на его -м выходе сигнал будет равен нулю (т.е. 0).
В блоке 17 масштабных усилителей, на входаг которого поступают с блока 15 сигналы a,tN , ajw ,..., они умножаются на весовые коэффициен25
,N-04b-,Nl,
(6)
К; N является новым значением 1-го коэффициента передачи. Второй член выражения (6) - по- правка к предыдущему значению коэффи-
управляющих воздействий,
циента передачи, учитывающая изменение характеристик процесса.
Сигналы с выхода блока 4 сумматоров поступают в блок 6 вычисления
управляющих воздействий,
12 коррекции управления, на другой вход которого подан задающий сигнал
Сброс запомненного УЗУ 14 значения отклонения выходной величины fttf СмЗ осуществляется следующим образом.После измерения выходной величины на выходе компаратора 11, а значит и на управляющем входе УЗУ 14 сигнал исчезает, осуществляется сброс запомненного значения отклонения выходной величины и подготовка к запоминанию очередного значения отклонения выхода atjtN . Измеренное значение выхода поступает также в блок 9 вычисления текущего среднего значения выходной величины, кото- ,рый вычисляет текущее среднее значение выходной величины по формуле (4). Значениеу М поступает на вход блока
12 коррекции управления, на другой вход которого подан задающий сигнал
9о . ями
в соответствии с выражениS npHfy(N)., ; 0, при |(.)1 S,j i (7)
-Уф при -8,j ,
где Ojj - 30Hf нечувствительности, в блоке 12 коррекции вычисляется коррекция управления и подается в блок 6 вычисления управлякмцих воздействий, где запо1-1инается и с приходом очередных входных сигналов суммируется с управляющим воздействием, компенсирующим влияние возмущений, определяемых по формуле (7). Таким образом, суммарное управляющее воздействие
bU :NltuUjN-0.
(8)
Введением коррекции дУкСи устраняется влияние медленных дестабилизирующих факторов, не связанных с действием контролируемых возмущений.
Фиксированное управляющее воздей- стБие uUm (7) выбирается исходя из чувствительности исполнительного устройства. Зона нечувствительности выбирается исходя из допуска на выходной параметр объекта.
На этом N -и цикл настройки за- . канчивается и устройство готово к новому циклу (такту). С началом (N+1)- го такта iUntf l рассчитанное по формуле (7) суммируется с + J и так далее.
Таким образом, в предлагаемой системе совмещены режимы обучения и управления, она обладает высокой помехоустойчивостью вследствие включения в схему блока 5 компараторов. Это позволяет также существенно увеличит скорость настройки коэффициентов передачи К; N , так как весовые коэффициенты У; могут иметь достаточно большое значение, порядка 0,3-0,5, тогда как в известной системе для отстройки от помех они должны приниматься равными 0,10-0,12. Все это позволяет с высокой точностью осуществлять стабилизацию выхода неста ционарного линейного объекта в условиях действия помех.
Формула изобретения
Адаптивная система стабилизации нестационарного дискретного объекта, содержащая блок измерения входных
5
, Ю 15
20
35
25JQ
ь40
50
55
величин, выходы которого непосредственно соединены с первыми входами первого блока сумматоров и через блок вычисления текущих средних значений входных величин - с вторыми входами первого блока сумматоров, выходы которого соединены с информационными входами блока вычисления управляющих воздействий, выход которого соединен с входом исполнитель- ного устройства, измеритель выходной величины, выход которого через блок вычисления текущего значения выходной величины соединен с первым входом блока коррекции управления, второй вход которого связан с выходом блока задания выходной величины, а выход соединен с входом блока вычисления управляющих воздействий, отличающаяся, тем, что, с целью повьшения точности системы, в нее введены блок компараторов, блок элементов И, второй блок сумматоров, блок памяти, блок масштабных усилителей, блок управляемых делителей, -сумматор, компаратор, блок задержки, управляемое запоминающее устройство, причем входы блока компараторов подключены к выходам первого блока сум - маторов, а выходы соединены с первыми входами блока элементов И, выходы которого соединены с управляющими входами блока управляемых делителей, первые информационные входы которого подключены к выходам первого блока сумматоров, первьш вход сумматора подключен к измерителю выходной величины, второй вход - к выходу блока вычисления текущего среднего значения выходной величины, а выход соединен с информационным входом управляемого заломинающего устройства, управляемый вход которого соединен с выходом компаратора, вход которого подключен к выходу измерителя выходной величины, а выход управляемого запоминающего устройства соединен с вторыми информационными входами блока управляемых делителей, выходы которого через блок масштабных усилителей соединены с первыми входами второго блока сумматоров, выходы которого подключены к вторым входам блока вычисления управ- лякщих воздействий и через блок памяти к вторым входам второго блока сумматоров, вход блока задержки подключен к выходу компаратора, а выход - к вторым входам блока элементов И.
ь
ro: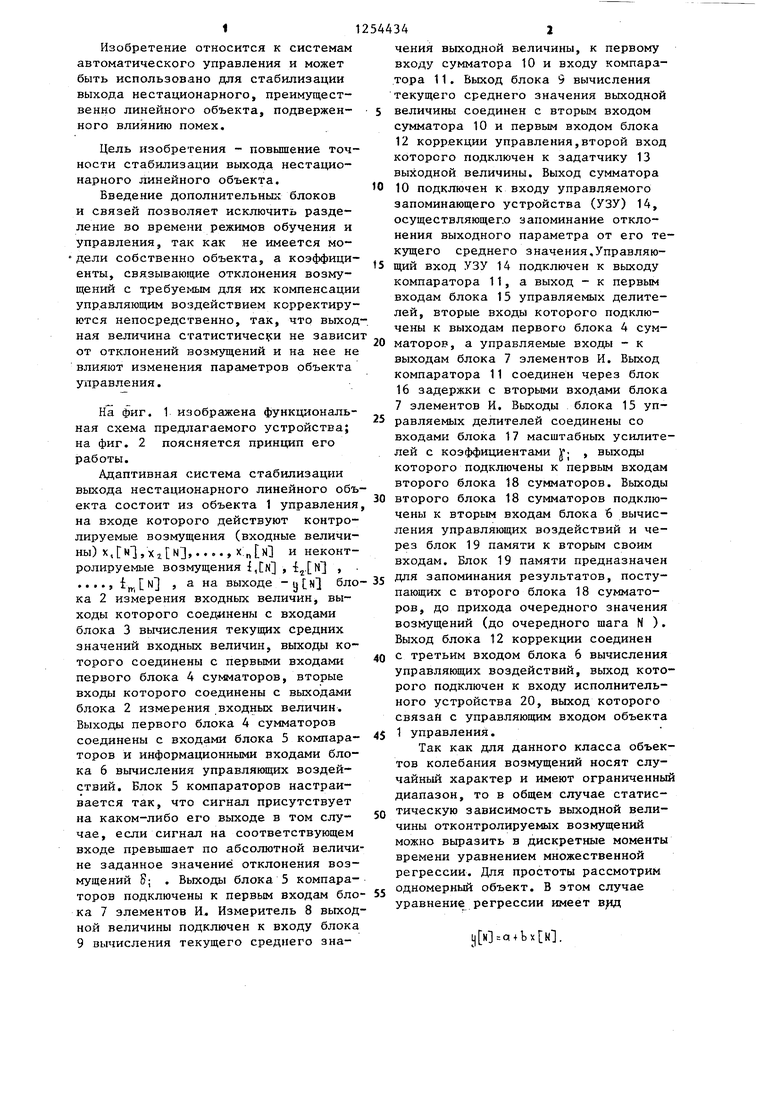

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для аварийного управления активной мощностью электростанции | 1990 |
|
SU1718329A2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Устройство для диагностики неисправностей технических объектов | 1988 |
|
SU1536357A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ БУДУЩЕГО СОСТОЯНИЯ КОРАБЛЯ | 2001 |
|
RU2189624C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Устройство для компенсации реактивной мощности | 1986 |
|
SU1347118A1 |
Изобретение относится к системам автоматического управления и может быть использовано для стабилизации выхода нестационарного, преимущественно линейного объекта, подвер- женного влиянию помех. Изобретение позволяет повысить точность выходной координаты объекта управления, что достигается совмещением режимов обу- . чения и управления и уменьшением влияния помех. Система содержит измерители входных и выходных величин, блоки вычисления их текущих средних значений, сумматоры, блок коррекции, блок задания, блок вычисления управляющих воздействий, исполнительное устройство. Дпя достижения поставленной цели в систему введены блок компараторов, входы которого подключены к выходам первого блока сумматоров, а выходы соединены с первыми входами блока элементов И, выходы кот орого соединены с управляющими входами блока управляемых делителей, первые информационные входы которого подключены к выходам первого блока сумматоров, сумматор, первьй вход которого подключен к измерителю вы- ходной величины, второй вход - к вы- S ходу блока вычисления текущего сред- f f него значения выходной величины, а : выход соединен с информационным вхо- дом управляемого запоминающего устройства, управляемый вход которого 3 через компаратор подключен к выходу измерителя выходной величины, а вы- . ход соединен с вторыми информацион- Ю ными входами блока управляемых дели- СД телей. Выходы последнего через блок масштабных усилителей соединены с ti первыми входами второго блока сумма- торов, выходы которого подключены к js вторым входам блока вычисления управляющих воздействий и через блок памяти к вторым входам второго блока сумматоров, выход порогового устройства через блок задержки подключен к J вторым входам блока элементов И. 2 ил.
Редактор Л.Пчелинская
Составитель В.Пешков Техред М.Ходанич
Заказ 4718/50 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Фиг. 2
Корректор С.Черни
| Ройтман Н.С., Чадеев В.М | |||
| Построение моделей процессов производства | |||
| - М.: Энергия, 1975,с.161-163 | |||
| Ройтман Н.С., Чадеев В.М | |||
| Стабилизация выхода нестационарного объекта и оценка степени идентичности.- В кн | |||
| Методы автоматизации систем | |||
| - М.: Энергия, 1972, с.311-327. |
