Изобретение относится к области систем автоматического управления (САУ) и может быть использовано для управления объектами в химической, нефтехимической и других отраслях промышленности.
Подсистемы автоматического управления современных промышленных автоматизированных систем управления технологическими процессами (АСУ ТП) представляют собой некоторые совокупности контуров регулирования, основу которых составляют простейшие одноконтурные управляющие структуры.
В условиях сложных технологических объектов, при наличии в них каналов с существенно нестационарными параметрами, простейшие одноконтурные САУ могут в процессе работы потерять исходное качество регулирования и перейти в неустойчивое состояние.
К подобным объектам управления (ОУ), в частности, относятся технологические процессы, имеющие, кроме основного канала управления, неконтролируемые нестационарные каналы воздействия на регулируемую переменную.
Довольно часто указанные ситуации возникают в контурах регулирования ОУ, имеющих общие технологические коллекторные связи по массовым или тепловым потокам, вызывающие в каналах объекта различные по характеру возмущения.
Наиболее значимое негативное воздействие на качество регулирования переменной оказывает нестационарность коэффициентов передачи каналов ОУ.
Указанная нестационарность вызывает снижение исходного качества работы контуров регулирования, так как настроечные параметры регуляторов, полученные в процессе начальной (пусковой) параметрической оптимизации, становятся, со временем, не адекватными свойствам ОУ и условиям его движения.
Последнее приводит к снижению точности регулирования и устойчивости вследствие расширения полосы динамических отклонений регулируемого параметра в процессе работы контура, снижения статической точности регулирования, снижения запаса устойчивости до возможного перехода контура регулирования в неустойчивое состояние.
Для сохранения исходного качества работы подобных САУ в процессе их эксплуатации актуальной задачей является стабилизация коэффициента передачи разомкнутой системы посредством цепей самонастройки.
Известна самонастраивающаяся система комбинированного регулирования, содержащая первый блок выделения модуля, последовательно соединенные блок памяти, блок умножения, сумматор, исполнительное устройство, объект, датчик выходной координаты объекта, измеритель рассогласования, регулятор и второй блок выделения модуля, последовательно соединенные датчик внешнего возмущения и блок деления, последовательно соединенные блок дифференцирования и третий блок выделения модуля, причем второй вход объекта соединен с входом датчика внешнего возмущения, выход которого соединен со вторым входом блока умножения, выход измерителя рассогласования соединен со входами первого блока выделения модуля и блока дифференцирования, выход регулятора соединен с вторым входом сумматора, в нее включены также датчик входной координаты объекта, управляемый ключ и последовательно соединенные первый, второй и третий логические блоки, вторые входы которых соединены с выходами, соответственно, второго, первого и третьего блоков выделения модуля, выход третьего логического блока соединен со вторым входом регулятора и через управляемый ключ - с входом блока памяти, выход исполнительного устройства соединен через датчик входной координаты объекта и блок деления со вторым входом управляемого ключа (SU 1254433, G05B 13/00, 1986).
Наиболее близкой к предложенной является самонастраивающаяся система автоматического управления, содержащая измеритель рассогласования, первый вход которого подключен к входу системы, регулятор, первый и второй сумматоры, объект управления, блок самонастройки, включающий первый, второй, третий и четвертый логические блоки, датчик внешнего возмущения, блок деления, управляемый ключ, блок памяти, первый, второй и третий блоки умножения, причем выход второго блока умножения подключен к первому входу первого сумматора, выход которого соединен с входом объекта управления и с первым входом второго сумматора, подключенного выходом к входу делимого блока деления, выход которого соединен с информационным входом управляемого ключа, подключенного выходом через блок памяти к первому входу второго блока умножения, второй вход которого соединен с входом делителя блока деления и с выходом датчика внешнего возмущения, выход объекта управления соединен с выходом системы и со вторым инверсным входом измерителя рассогласования, подключенного выходом к первому входу блока самонастройки и к информационному входу регулятора, управляющий вход которого соединен с управляющим входом управляемого ключа и с выходом блока самонастройки, первый выход регулятора подключен ко второму входу первого блока умножения, первый вход которого соединен с первым входом третьего блока умножения, первым входом второго блока умножения и выходом блока памяти, выход первого блока умножения подключен ко второму входу блока самонастройки и второму входу первого сумматора, второй выход регулятора соединен со вторым входом третьего блока умножения, выход которого подключен ко второму инверсному входу второго сумматора (SU 1386957, G05B 13/00, 1987).
Данная известная система построена на основе принципа комбинированного регулирования. Она содержит в своей структуре разомкнутый и замкнутый контуры формирования сигналов управления, цепи самонастройки коэффициента передачи разомкнутого контура и цепи стабилизации коэффициента передачи разомкнутой системы.
Данная известная система обеспечивает повышение точности и надежности двухканальных нестационарных систем автоматического управления.
Благодаря указанной структуре эта система эффективно парирует внешнее контролируемое возмущение и стабилизирует условия работы регулятора в условиях нестационарного объекта.
Однако на практике в составе подсистем автоматического управления большинство управляющих структур являются одноконтурными.
Поэтому проблема повышения качества работы одноконтурных систем автоматического управления нестационарными объектами является актуальной.
Задача, решаемая данным изобретением, - повышение точности и надежности систем управления нестационарными, по коэффициенту передачи, одноканальными объектами управления.
Для решения поставленной задачи предложена самонастраивающаяся система автоматического управления, содержащая измеритель рассогласования, первый вход которого подключен к входу системы, регулятор, первый, второй и третий блоки умножения, первый и второй сумматоры, объект управления, блок самонастройки, включающий блок выделения модуля сигнала, первый логический блок определения момента самонастройки и второй, третий и четвертый логические блоки проверки наступления квазистатического состояния объекта управления, корректирующий фильтр, включающий блок деления, первый управляемый ключ, первый блок памяти, причем выход второго сумматора подключен к входу делимого блока деления, выход блока деления соединен с информационным входом первого управляемого ключа, первый управляемый ключ подключен выходом к входу первого блока памяти, выход основной регулируемой переменной объекта управления соединен с выходом системы и вторым инверсным входом измерителя рассогласования, измеритель рассогласования подключен выходом к информационному входу регулятора и к первому входу блока самонастройки, второй вход блока самонастройки подключен через блок выделения модуля к третьему входу первого логического блока, первый выход регулятора, которому соответствует полный сигнал регулятора, подключен к второму входу первого блока умножения, первый вход первого блока умножения соединен с первым входом третьего блока умножения и с выходом первого блока памяти, второй выход регулятора, которому соответствует сумма пропорциональной и дифференциальной составляющих полного выходного сигнала регулятора, соединен с вторым входом третьего блока умножения, выход третьего блока умножения подключен к второму инверсному входу второго сумматора, отличающаяся тем, что в нее дополнительно введены первый блок запаздывания включения самонастройки при наступлении квазистатики объекта управления, блок запрета самонастройки системы при отличии величины задания системы в текущий и предыдущий моменты квазистатики объекта, второй управляемый ключ, второй блок запаздывания и второй блок памяти для сохранения в моменты самонастройки интегральной составляющей сигнала управления, третий управляемый ключ, третий блок запаздывания, третий блок памяти для сохранения значений коэффициентов самонастройки, третий сумматор для формирования сигнала компенсации возмущения входа объекта управления при самонастройке, причем первый вход первого блока запаздывания соединен с выходом четвертого логического блока, а выход первого блока запаздывания подключен к первому входу блока запрета самонастройки, третий вход блока запрета самонастройки соединен с входом системы и с первым входом измерителя рассогласования, а выход блока запрета самонастройки соединен с управляющими входами первого, второго и третьего управляемых ключей, информационный вход первого управляемого ключа соединен с вторым входом блока самонастройки, информационный вход второго управляемого ключа соединен с выходом второго сумматора, а выход второго управляемого ключа соединен через второй блок запаздывания с входом второго блока памяти, выход второго блока памяти соединен с входом делителя блока деления, информационный вход третьего управляемого ключа соединен с выходом первого блока памяти, а выход третьего управляемого ключа подключен через третий блок запаздывания к входу третьего блока памяти, выход третьего блока памяти соединен с вторым инверсным входом третьего сумматора, первый вход третьего сумматора соединен с первым входом первого блока умножения, выход третьего сумматора подключен к первому входу второго блока умножения, второй вход второго блока умножения соединен с первым выходом регулятора, выход второго блока умножения соединен с первым инверсным входом первого сумматора, второй вход первого сумматора соединен с выходом первого блока умножения и с первым входом второго сумматора, а выход первого сумматора подключен к входу объекта управления.
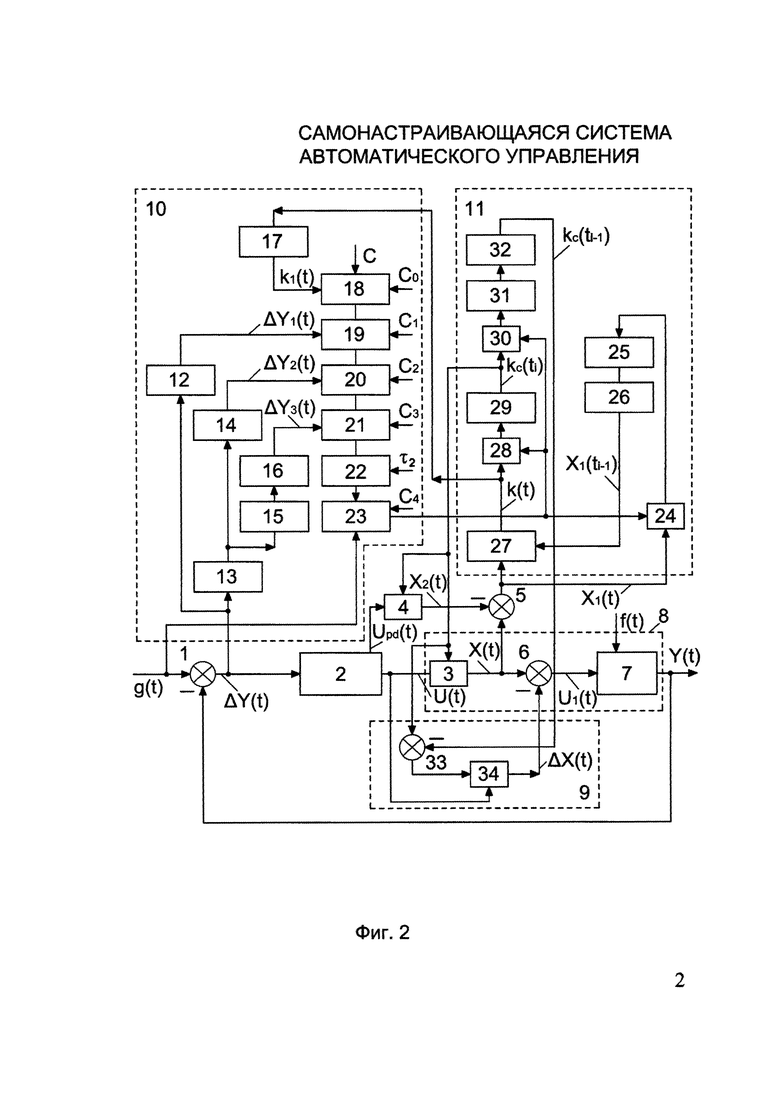
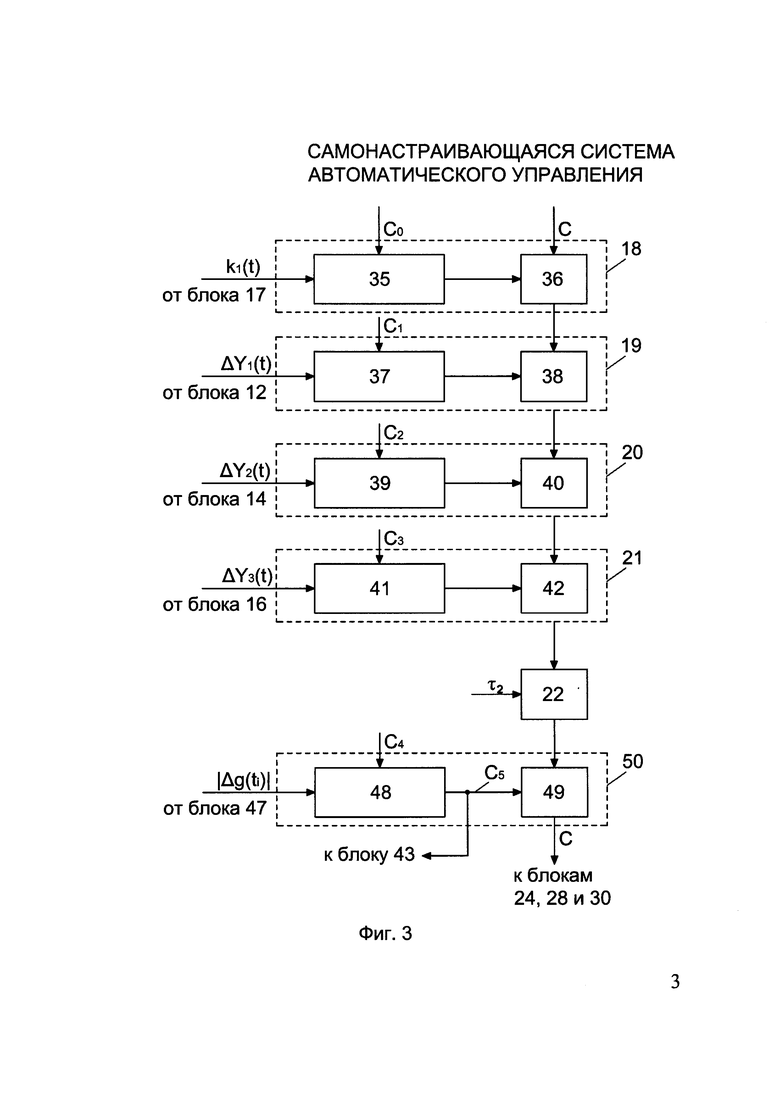
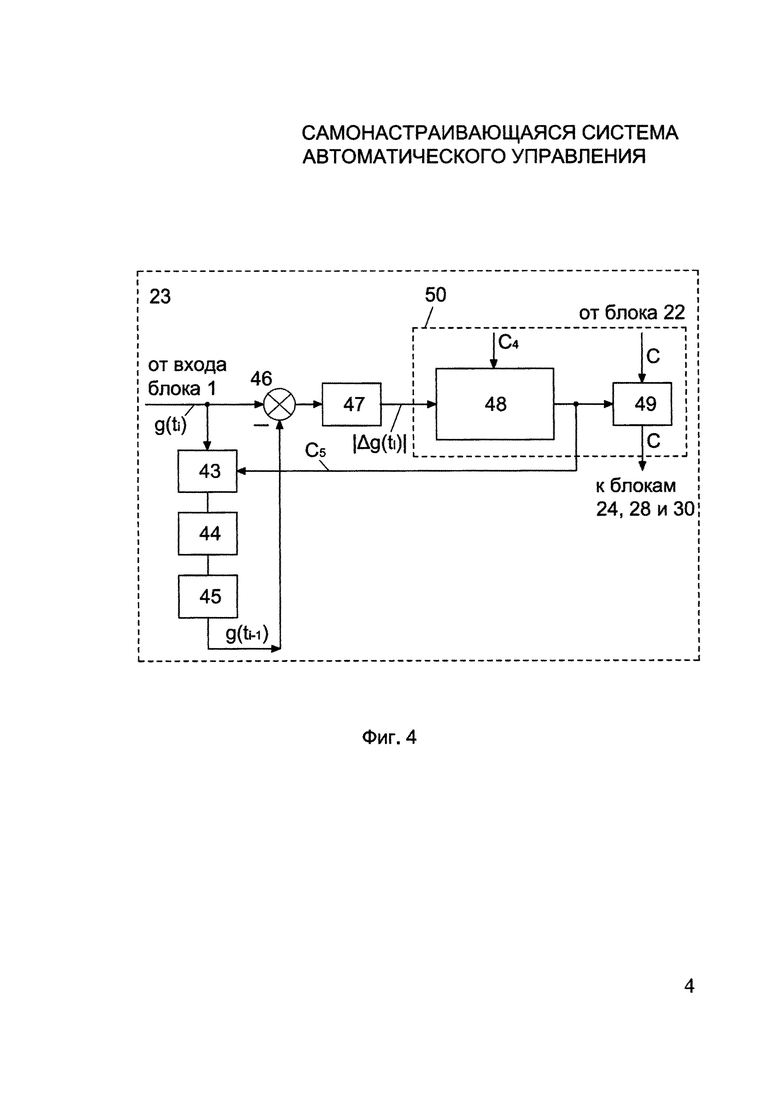
Сущность изобретения иллюстрируется прилагаемыми чертежами (фиг. 1-4). На фиг. 1 представлена функциональная структура, а на фиг. 2 - структурная схема предложенной системы. На фиг. 3 и 4 представлены блок-схемы реализации логических блоков, входящих соответственно в состав блоков самонастройки и запрета самонастройки системы автоматического управления.
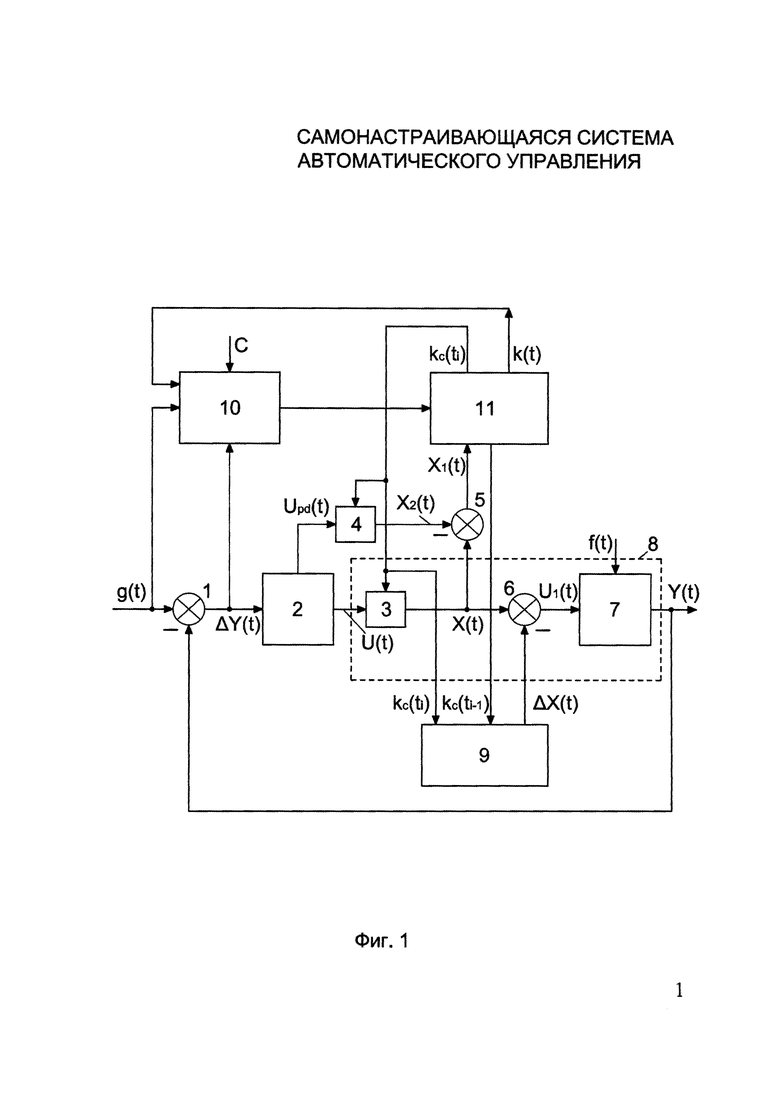
Функциональная структура системы (фиг. 1) содержит замкнутый контур регулирования, блок самонастройки, корректирующий фильтр, блок компенсации возмущения входа объекта, два блока умножения, два сумматора и соответствующие каналы связи между блоками.
В соответствии с фиг. 1 система управления включает: измеритель рассогласования 1, регулятор 2, первый блок умножения 3, третий блок умножения 4, второй сумматор (блок суммирования) 5, первый сумматор (блок суммирования) 6, объект управления 7, обобщенный объект управления 8, в состав которого помимо объекта управления 7 входят первый блок умножения 3 и первый сумматор 6, блок 9 компенсации возмущения входа объекта управления при самонастройке, блок самонастройки 10, корректирующий фильтр 11.
В соответствии с фиг. 2 в состав блока самонастройки 10 входят второй блок выделения модуля сигнала 12, первый блок дифференцирования 13, третий блок выделения модуля сигнала 14, второй блок дифференцирования 15, четвертый блок выделения модуля сигнала 16, первый блок выделения модуля сигнала 17, первый, второй, третий и четвертый логические блоки 18-21, первый блок запаздывания управляющего сигнала 22 (далее - первый блок запаздывания), блок 23 запрета самонастройки. Корректирующий фильтр 11 включает второй управляемый ключ 24, второй блок запаздывания 25, второй блок памяти 26, блок деления 27, первый управляемый ключ 28, первый блок памяти 29, третий управляемый ключ 30, третий блок запаздывания 31, третий блок памяти 32. Блок 9 компенсации возмущения входа объекта управления при самонастройке содержит третий сумматор (блок суммирования) 33 и второй блок умножения 34.
В соответствии с фиг. 3 блок-схема реализации логической структуры блока самонастройки 10 включает: компаратор 35 и управляемый ключ 36; компаратор 37 и управляемый ключ 38; компаратор 39 и управляемый ключ 40, компаратор 41 и управляемый ключ 42.
В соответствии с фиг. 4 блок-схема реализации блока 23 запрета самонастройки включает управляемый ключ 43, блок запаздывания сигнала 44, блок памяти 45, сумматор сигналов 46, блок выделения модуля сигнала 47.
В состав обеих блок-схем входят также компаратор 48 и управляемый ключ 49, составляющие пятый логический блок 50. Управляемый ключ 49 связан с управляемым ключом 42 через первый блок запаздывания 22. Компаратор 48 связан с блоком выделения модуля сигнала 47.
На фиг. 1-4 приняты следующие обозначения:
g(t) - задание системы; g(ti), g(ti-1),- значения задания системы в текущий и предыдущий моменты самонастройки; |Δg(ti)| - модуль разности значений сигналов заданий системы в текущем и предыдущем состояниях самонастройки; ΔY(t) - отклонение выходного сигнала объекта управления от задания; С - управляющий сигнал; С0 - задание для первого логического блока 18; C1 - задание для второго логического блока 19; С2 - задание для третьего логического блока 20; С3 - задание для четвертого логического блока 21; С4 - задание для блока запрета самонастройки 23; С5 - выходной сигнал компаратора 48; τ2 - задание для первого блока запаздывания 22; U(t) - полный выходной сигнал регулятора; Upd(t) - сумма пропорциональной и дифференциальной составляющих полного выходного сигнала регулятора; X(t) - выходной сигнал регулятора с учетом самонастройки; X2(t) - пропорционально-дифференциальная составляющая полного выходного сигнала регулятора с учетом самонастройки; X1(t) - интегральная составляющая полного выходного сигнала регулятора с учетом самонастройки на выходе второго сумматора 5; X1(ti) и X1(ti-1) - значения интегральных составляющих сигналов управления в текущий и предыдущий моменты самонастройки; k(t) - текущее значение выходного сигнала блока деления 27; ΔX(t) - сигнал компенсации возмущения входа объекта, полученного при самонастройке; U1(t) - сигнал управления на входе объекта; kc(ti), kc(ti-1) - значения коэффициентов самонастройки в текущий и предыдущий моменты самонастройки; k1(t) - модуль выходного сигнала блока деления 27; ΔY1(t) - модуль входного сигнала регулятора; ΔY2(t) - модуль производной входного сигнала регулятора; ΔY3(t) - модуль второй производной входного сигнала регулятора.
В процессе работы системы блоки 1, 2 и обобщенный объект управления 8 составляют замкнутый контур регулирования. Блок 9 формирует сигнал компенсации возмущения входа объекта, возникающего при самонастройке. Блоки умножения 4 и суммирования 5 соединяют замкнутый контур регулирования и корректирующий фильтр 11. В составе корректирующего фильтра 11 блок деления 27 определяет коэффициент самонастройки, первый управляемый ключ 28 исполняет команду самонастройки от блока 10, первый блок памяти 29 сохраняет величину коэффициента самонастройки и выдает его на каждом такте работы алгоритма на входы блоков умножения 3, 4 для самонастройки коэффициента передачи разомкнутой системы. Управляемый ключ 24, второй блок запаздывания 25 и второй блок памяти 26 осуществляют запоминание текущего значения коэффициента самонастройки в конце текущего такта обработки информации и использование этого значения на следующем акте самонастройки в качестве предыдущего сравнительного значения. Блок самонастройки 10 осуществляет подготовку сигналов для использования их при анализе условий квазистатики: блоки 12, 14, 16, 17 выделяют модули сигналов, блоки 13 и 15 определяют первую и вторую производные сигнала ΔY(t), логические блоки 18-21 и блок 22 запаздывания сигнала осуществляют проверку условий наступления квазистатики; блок 23 осуществляет запрет самонастройки при изменении задания системы.
Предлагаемая система решает задачу управления нестационарным объектом, который в общем виде можно описать уравнением:

где ai, k0(t), d0(t) - параметры объекта управления;
Y(t) - регулируемая величина;
Y(i)(t) - производные i-х порядков регулируемой величины;
U1(t) - входной сигнал объекта управления;
f(t) - обобщенное неконтролируемое возмущение.
Рассматриваем нестационарные объекты следующего вида:
kmin≤k0(t)≤kmax;

Уравнения (1) и (2) описывают движение объектов с нестационарными коэффициентами передачи.
Задача управления заключается в сведении до заданной величины ошибки регулирования.

где δ - некоторая заданная положительная величина.
Типовая одноконтурная система автоматического управления состоит из охваченного отрицательной обратной связью канала управления (фиг. 1), включающего измеритель рассогласования 1, регулятор 2 (в данном случае типовой PI или PID-структуры), нестационарный (по коэффициенту передачи) объект управления 7, функционирующий в условиях параметрического (внешнего и/или внутреннего) возмущения f(t).
Типовая одноконтурная управляющая структура не решает с необходимым качеством и надежностью задачу стабилизации выходного параметра в условиях нестационарного по коэффициенту передачи объекта.
Решение сформулированной выше, в соотношениях (1)-(3), задачи означает сохранение (с допустимой погрешностью) исходного качества работы одноконтурной системы в процессе эксплуатации в условиях регулирования существенно нестационарных объектов.
Последнее означает необходимость стабилизации коэффициента передачи разомкнутой системы.

где koу(t) - коэффициент передачи объекта управления 7;
kрег(t) - коэффициент передачи регулятора.
Предлагаемая САУ, по сравнению со структурой типовой системы, содержит дополнительно функциональные блоки самонастройки 10, корректирующего фильтра 11, компенсации возмущения входа объекта управления 9 и дополнительные блоки умножения 3, 4 и суммирования 5, 6.
Дополнительные функциональные блоки обеспечивают решение поставленной задачи - стабилизацию коэффициента передачи разомкнутой системы. При этом блок самонастройки 10 обеспечивает текущее определение необходимости самонастройки, наступления квазистатических состояний объекта управления и блокировку самонастройки коэффициента передачи разомкнутой системы при изменении задания регулятора. Блок самонастройки 10, при выполнении всех заложенных в него условий, выдает в корректирующий фильтр 11 сигнал С разрешения на самонастройку.
Корректирующий фильтр 11 рассчитывает и запоминает коэффициент самонастройки для текущей корректировки выходного сигнала регулятора и для последующего использования этого коэффициента. Блоки умножения 3, 4, 34 и суммирования 5, 6, 33 обеспечивают требуемые преобразования сигналов и необходимую информационную связь между функциональными блоками.
Указанная задача может быть решена с требуемым качеством, если дополнительные структурные блоки системы обеспечат компенсацию нестационарности коэффициента передачи объекта. С этой целью в структуру типового контура предлагаемой системы, между выходом регулятора 2 и входом объекта управления 7 введены первый блок умножения 3 и блок суммирования 6. На первый вход блока умножения 3 поступает сигнал самонастройки kc(ti) для выполнения параметрической коррекции коэффициента передачи нестационарного объекта управления. На первый (инверсный) вход сумматора 6 поступает сигнал компенсации возмущения входа объекта, вызванного актом самонастройки. Сигнальная компенсация выполняет функцию гармонизации параметрического и сигнального взаимовлияния в канале управления.
Рассматриваем совокупность первого блока умножения 3, блока суммирования 6 и объекта управления 7 как некий обобщенный объект 8, коэффициент передачи которого по каналу управления определяется выражением:

где: kо(t) - коэффициент передачи обобщенного объекта 8;
kc(t) - коэффициент самонастройки;

Требуется обеспечить: 
Поскольку по условию задачи для любого t
kрег(t)=const,
то в итоге требуется обеспечить:

Следовательно, если дополнительные блоки предложенной системы обеспечат приближенное, с требуемой точностью, выполнение соотношения (8) за счет управления величиной kc(t) при любых допустимых рабочих изменениях kоу(t), то поставленная задача будет решена.
Предложенная система работает следующим образом.
Блок самонастройки 10 предназначен для определения моментов самонастройки kpc(t) в состояниях квазистатики объекта управления с учетом запрета проведения самонастройки при изменениях задания системы в любой текущий момент самонастройки, по сравнению с предьщущим моментом самонастройки. Результатом работы блока самонастройки 10 является определение моментов необходимости и возможности проведения самонастройки с выдачей в корректирующий фильтр 11 разрешающего сигнала.
Блок самонастройки 10 работает следующим образом.
Логический блок 18 служит определению моментов проведения самонастройки. В нем проверяется выполнение условия (9):

В логических блоках 19, 20, 21 проверяется наступление состояний квазистатики в объекте управления:

Посредством блока запаздывания 22 выполняется проверка сохранности относительного равновесия данного канала объекта управления в течение заданного времени.
Это условие позволяет более качественно настроить требования к состояниям квазистатики объекта управления. Для этого в блоке 22 организовано запаздывание выходного сигнала блока по отношению к входному сигналу на заданное время τ2:

где: C(t) - рабочий сигнал С на выходе блока запаздывания 22;
Cвх(t-τ2) - рабочий сигнал на входе блока 22.
Целесообразно положить: τ2=n⋅h,
где: n - количество тактов работы алгоритма управления,
n∈{0, 1, 2, …},
h - длительность такта дискретности работы алгоритма.
Если условия (10) объекта сохраняются в течение заданного времени τ2, связанного с инерционностью и условиями движения объекта управления, то состояние относительного равновесия считается квазистатическим.
В компараторе 48 блока 23 запрета самонастройки (фиг. 4) выполняется проверка соблюдения требования неизменности задания системы в текущем акте самонастройки по сравнению с предыдущим. На первый вход и второй инверсный вход сумматора сигналов 46 блока 23 запрета самонастройки системы поступают, соответственно, текущее g(ti) значение задания системы и последнее задание системы g(ti-1), записанное в предшествующий i-1 акт самонастройки.

При соблюдении требования (12) открываются управляемые ключи 49 и 43. Текущее значение задания системы g(ti) поступает в блок памяти 45 через управляемый ключ 43 и блок запаздывания сигнала 44. Эта процедура позволяет учесть требование неизменности (с допустимой погрешностью) задания системы для выдачи сигнала разрешения самонастройки и обеспечивает обновление значения задания системы в блоке памяти 45 для использования его в последующем состоянии квазистатики, как предыдущее.
При одновременном выполнении условий (9), (10), сохранении указанного состояния в течение заданного времени τ2, проверяемого в блоке запаздывания 22, и отсутствии блокировки по изменению задания системы, проверяемому в блоке 23 запрета самонастройки, блок самонастройки 10 выдает разрешение на проведение самонастройки в данный ti - момент времени.
При этом управляющий сигнал С проходит (фиг. 3) через управляемые ключи 36, 38, 40, 42 логических блоков 18, 19, 20, 21 и блок запаздывания 22 условий квазистатики, управляемый ключ 49 блока 23 запрета самонастройки (фиг. 4) и поступает на управляющие входы управляемых ключей 24, 28 и 30 корректирующего фильтра 11 (фиг. 2). Ключи открываются и их входные сигналы k(ti), X1(ti), kc(ti) поступают, соответственно, на входы первого блока памяти 29 и блоков 25 и 31 запаздывания сигнала. На данном i-такте работы алгоритма самонастройки выходной сигнал kc(ti) первого блока памяти 29 поступает и на первый вход блока умножении 3, выполняя коррекцию ko(t) в ti - момент времени, и на первый вход блока 4 умножения для корректировки сигнала Upd(t). Запаздывание записи сигналов в блоках памяти 26, 32 и 45 посредством блоков 25, 31 запаздывания сигнала (фиг. 2) и блока запаздывания сигнала 44 (фиг. 4) обеспечивает предварительное использование сигналов, содержащихся в соответствующих блоках памяти, перед записью в них новых значений этих сигналов в пределах текущего акта обработки информации в системе управления. Параметр τ1 запаздывания сигналов в блоках 25, 31 и 44 имеет один и тот же смысл:

То есть блок запаздывания с параметром τ1 означает использование содержимого блоков памяти 26, 32 и 45 в пределах данного такта дискретности работы алгоритма до обновления сигналов, содержащихся в них.
Полный выходной сигнал регулятора 2 в общем функциональном виде можно представить для любого t:

Выходной сигнал первого блока умножения 3:

Выходной сигнал третьего блока умножения 4:

Выходной сигнал второго сумматора 5:

В уравнении (17) правая часть представляет собой интегральную составляющую сигнала управления X(t), поступающего в объект.
В состояниях квазистатики объекта управления, вследствие наложенных на вход регулятора ограничений, интегральная составляющая практически полностью, с точностью до погрешности определения статики объекта управления, равна значениям полных сигналов управления, поступающих на объект в эти моменты.
Для упрощения используемых выражений обозначим правые части уравнения (17) для моментов самонастройки ti и ti-1, соответственно, через I(ti) и I(ti-1).
Выходные сигналы блока деления 27, первого управляемого ключа 28 и первого блока памяти 29 в моменты самонастройки являются равными, т.к. при самонастройке весь канал от выхода сумматора 5 до входов в первый 3 и третий 4 блоки умножения открыт.
Тогда сигнал kc(ti) можно представить:

Сигнал I(ti-1) записан во втором блоке памяти 26 в предшествующий ti-1 момент самонастройки. Аналогично и в текущий ti момент самонастройки, после использования в вычислениях, сигнал I(ti) также будет сохранен для дальнейшего использования его в качестве предшествующего сигнала в следующий момент самонастройки ti+1.
Указанное в формуле (18) справедливо, поскольку все параметрические изменения, имеющие относительно устойчивый характер, проявляются в последовательных квазистатических состояниях объекта. Эти состояния, в свою очередь, практически полностью определяются значениями квазистатических сигналов управления, определяющую основу которых составляют их интегральные составляющие. А отношение последовательных квазистатических значений интегралов сигналов управления по формуле (18) является величиной, обратной отношению в указанные моменты времени коэффициентов передачи нестационарного объекта управления.
Поэтому отношение указанных в формуле (18) сигналов, использованное в качестве коэффициента самонастройки kc(ti), обеспечивает стабилизацию коэффициента передачи разомкнутой системы.
Однако стабилизация коэффициента передачи разомкнутой системы приведенным выше способом в каждом акте параметрической самонастройки вызывает сигнальное возмущение входа объекта управления. Для компенсации указанного возмущения в системе (фиг. 2) предусмотрен блок 9 компенсации возмущения входа объекта управления при самонастройке. Величина сигнала компенсации рассчитывается по очевидной формуле:

Коэффициент самонастройки в форме, удовлетворяющей условию (18), позволяет скомпенсировать нестационарность коэффициента передачи объекта управления в квазистатических состояниях с необходимой точностью, зависящей от заданной предельной погрешности определения статики объекта. Допустимая погрешность стабилизации коэффициента передачи разомкнутой системы между актами самонастройки определяется требованием (9).
Таким образом, предложенный метод самонастройки и система, реализующая его, решают сформулированную задачу повышения качественных показателей работы одноконтурной САУ в условиях нестационарных по коэффициенту передачи объектов управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
Самонастраивающаяся система автоматического управления содержит измеритель рассогласования, регулятор, первый и третий блоки умножения, первый и второй сумматоры, объект управления, блок самонастройки, корректирующий фильтр, блок компенсации, соединенные определенным образом. Обеспечивается повышение точности и надежности систем управления нестационарными одноканальными объектами управления. 4 ил.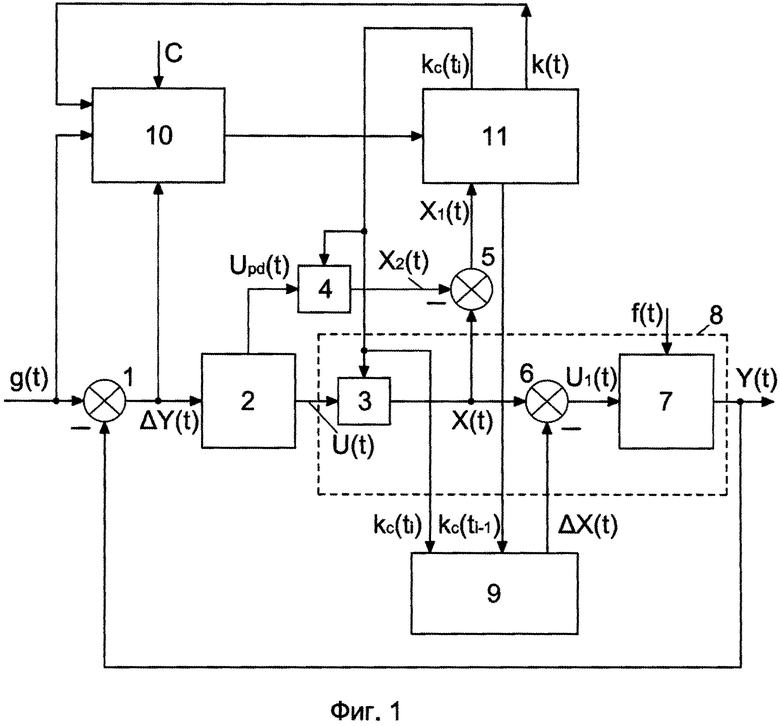
Самонастраивающаяся система автоматического управления, содержащая измеритель рассогласования, регулятор, первый и третий блоки умножения, первый и второй сумматоры, объект управления, блок самонастройки, корректирующий фильтр, блок компенсации, при этом вход системы подключен к первому входу измерителя рассогласования и к третьему входу блока самонастройки, второй вход и выход блока самонастройки подключены соответственно к первому выходу и к первому входу корректирующего фильтра, выход измерителя рассогласования подключен к входу регулятора и к первому входу блока самонастройки, первый выход регулятора подключен к первому входу первого блока умножения и к третьему входу блока компенсации, второй выход регулятора подключен к второму входу третьего блока умножения, выход третьего блока умножения подключен к инверсному второму входу второго сумматора, выход второго сумматора подключен ко второму входу корректирующего фильтра, третий выход корректирующего фильтра подключен к первому входу третьего блока умножения и к вторым входам первого блока умножения и блока компенсации, выход первого блока умножения подключен к первым входам первого и второго сумматоров, первый вход блока компенсации подключен к второму выходу корректирующего фильтра, а выход подключен к инверсному второму входу первого сумматора, вход объекта управления подключен к выходу первого сумматора, а выход объекта управления подключен к инверсному входу измерителя рассогласования и к выходу системы.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система автоматического управления для нестационарных объектов с запаздыванием | 1986 |
|
SU1451644A1 |
| Дискретная самонастраивающаяся система | 1979 |
|
SU824139A1 |
| US 4814968 A, 21.03.1989 | |||
| US 7418432 B2, 26.08.2008. | |||

