Изобретение относится к автоматизации производственных процессов и может быть использовано для управления автоматическими кранами-шта- белерами.
На чертеже представлена структурная схема устройства.
В состав устройства входят блок 1 опроса с поразрядным опросом десятичных чисел, соответствующих номерам ячеек, считывающий блок 2, блок 3 совпадения адреса, соединенный поразрядно с выходами блока опроса и считывающего блока, блок 4 определения направления движения и блок 5 управления приводом конвейера. Блок 1 опросавыполнен в виде кнопки вызова цифр соответствующих десятичных разрядов с пульта управления (не показан) с запоминанием опрошенной цифры.
Считывающий блок 2 состоит из бескбнтактных датчиков, выполненных например, из ферритовых полуколец с входными и выходными обмотками для прямого и обратного движения, замыкаемых сердечниками при подходе люльки конвейера к ячейке.
Блок 4 определения направления движения.содержит блок 6 реверса, блок 7 запоминания адреса, две группы последовательно соединенных элементов И 8 и 9, причем число элементов в каясдой группе равно числу десятичных разрядов номеров ячее и. элемент ИЛИ 10.
Блок 5 управления приводом кон-., вейера включает в себя блок 11 памти сигнала совпадения, сдвиговые схемы 12 и, 13 соответственно малой скорости и большой скорости, блоки 14 и 15 совпадения малой скорости соответственно для прямого и обратного движения, блоки 16 и 17 совпадения большой скорости соответственно для прямого и обратного движения элементы И 18-23, элементы ИЛИ 24 и 25 и триггеры 26-29.
Синхронизация работы устройства осуществляется от тактового генератора 30.
Устройство работает следующим образом.
Сигнал опроса каждой цифры соответствующего десятичного разряда с блока 1 опроса поступает в блок 6 реверса, а также на считывающий блок 2 и блок 3 совпадения адреса, Если люлька конвейера стоит на местостанова, с выходной обмотки датчика считывающего блока 2 поступает сигнал на входы схем совпадения блока 5 и на блок 7 запоминания адреса. Выходной сигнал с этого блока Опрашивает схемы совпадения для прямого и обратного движения в блоке 2. Сигнал опроса любой цифры разряда с блока 1 в соответствии с программой реверса в блоке 2 поступает на другой вход одной из схем совпадения, которая выдает сигнал на шину прямо - го или обратного движения (п, о). Если опрашиваемая и считываемая цифры совпадают, с выхода соответствующего разряда блока 6 не вьщается сигнал направления движения, а блок 3 вьщает сигнал совпадения с.
При совпадении цифр старших разрядов сторону движения определяют цифры младшего разряда, а при несовпадении - цифры самого старшего разряда.
Сигнал направления движения цифр
младшего разряда блока 6 прямого п или обратного с проходит через элементы И 8 - 8 или 9 - 9 при напичии сигналов с
с блока
3.. Сигнал старшего разряда блока 6 Q непосредственно проходит через элементы И или 9 при наличии сигна-; лов в, в ,в или в. с блока 6, объединяемых элементом ИЛИ 10, на запуск триггера 26 или 27 малой скорости блока управления приводом. Триггер
27обеспечивает прямое, а триггер
28- обратное движение с малой скоростью.
Сигнал останова конвейера вызывает формирование С1 гналов на выходах элементов И 22 и 23, осуществляющих сброс триггеров 26 и 27.
0
Поскольку сигнал совпадения младшего разряда с блока 3 пропадает, как только люлька сходит с места, в блоке 11 запоминается сигнал совпадения по каждой цифре. Выходные сигналы с блока 11 по каждой цифре поступают на сдвиговую схему 13 большой скорости, которая сдвигает сигнал на +1 или -1 в зависимости от направления движения, чтобы выдать сигнал для запитки датчиков 1-го разряда в блоке 2. Сдвинутый сигнал поступает также на вход одного из блоков 16 и 17 совпадения большой скорости, обеспечивая включение триггеров 28 или 29 большой скорости.
10
15
20
25
При подходе люльки к месту останова за одну позицию до останова конвейер должен перейти на малую скорость. Для этого сигнал опр.оса по соответствующей останову цифре младшего разряда поступает на сдвиговую схему 12 малой скорости, которая сдвигает сигнал опроса этой цифры на - 1 и этим сигналом запитывает первичные обмотки датчиков предшествующей останову цифре. Этот же сиг- нал поступает на первый вход одного из блоков 14 и 15 совпадения малой скорости. Как только датчики цифры, предшествующей останову, выдадут сигнал, который поступит на второй вход блока 14 или 15, с выхода одного из этих блоков через элемент И 18 или 19 поступает сигнал сброса на триггер 28 или 29, а через элемент ИЛИ 24 или 25 поступает сигнал включения одного из триггеров 26 и 27 малой скорости.
Формула изобретения
Устройство для дискретного изменения скорости движения конвейера, содержащее блок опроса, считывающий блок, блок совпадения адреса, входы которого соединены с выходами блока опроса и считывающего, блока, блок определения направления движения и блок управления приводом, отличающееся тем, что, с,целью расширения функциональных возможностей путем дискретного изменения скорости в начале движения, выход блока опроса соединен поразрядно с первым входом считывающего блока, блок определения направления движения снабжен блоком запоминания адреса, подключенным к разрядным выходам считывающего блока, блоком реверса, первый вход которого соединен с выходом блока опроса, а второй вход - с выходом блока запоминания адреса, двумя группами последовательно соединенных элементов И, у которых первые входы соединены с первыми и вторыми выходами блока реверса, соответствующими десятичным разрядам адреса, вторые входы всех элементов И, кроме последних в каждой группе, соединены с выходами блока совпадения адреса, соответствующими десятичным разрядам адреса начиная с разряда десятков, вторые входы последних элементов И соединены через дополнительно введенный элемент ИЛИ
30
35
45
50
55
10
15
20
25
0
5
5
0
5
С третьими выходами блока реверса, а блок управления приводом снабжен блоком памяти сигнала совпадения, подключенным к выходу разряда единиц блока совпадения адреса, двумя сдвиговыми схемами малой и большой скорости, четьфьмя блоками совпадения скорости, шестью элементами И, .двумя элементами ИЛИ и ч ет.ьфьмя триггерами, при этом вход сдвиговой схемы малой скорости подключен к выходу разряда единиц блока опроса, два ее выхода - к второму и третьему считывающего блока, а два других выхода - к первым входам первого и второго блоков совпадения скорости, выход сдвиговой схемы большой скорости подключен к выходу блока памяти сигнала совпадения, два ее выхода - к четвертому и пятому входам считывающего блока, а ;- два других выхода - к первым входам третьего и четвертого блоков совпадения скорости, вторые входы блоков совпадения скорости соединены с со- ответствую1цими выходами считывающего блока, выход первого блока совпадения скорости через последовательно включенные первые элементы И и ИЛИ соединен:., с первым входом первого триггера, выход второго блока совпадения скорости через последова-(Г тельно включенные вторые элементы И и ИЛИ соединен с первым входом второго триггера, выходы третьего и четвертого блоков совпадения скорости соответственно через третий и четвертый элементы И соединены с первыми входами третьего и четвертого триггеров, входы пятого элемента И подключены к выходам блока совпадения адреса, соответствующим десятичным разрядам адреса начиная с разряда десятков, а его выход - к вторым входам первого и второго элементов Инк первым входам шестого элемента И, второй вход которого подключен к выходу разряда единиц блока совпадения адреса, а БЫХОД - к вторым входам первого и второго триггеров, вторые входы первого элемента Риш и третьего элемента И и тре тий вход первого элемента И подключены к выходу последнего элемента И из первой группы элементов И блока определения направления движения, вторые входы второго элемента ИЛИ, четвертого элемента И и третий вход второго элемента И подключены к вы51254510ft
ходу последнего элемента И из второй третьего и четвертого триггеров сое- группы элементов И блока определения динены соответственно с выходами пер- направления движения, а вторые входы вого и второго элементов И.
4.. 4 , i Л2-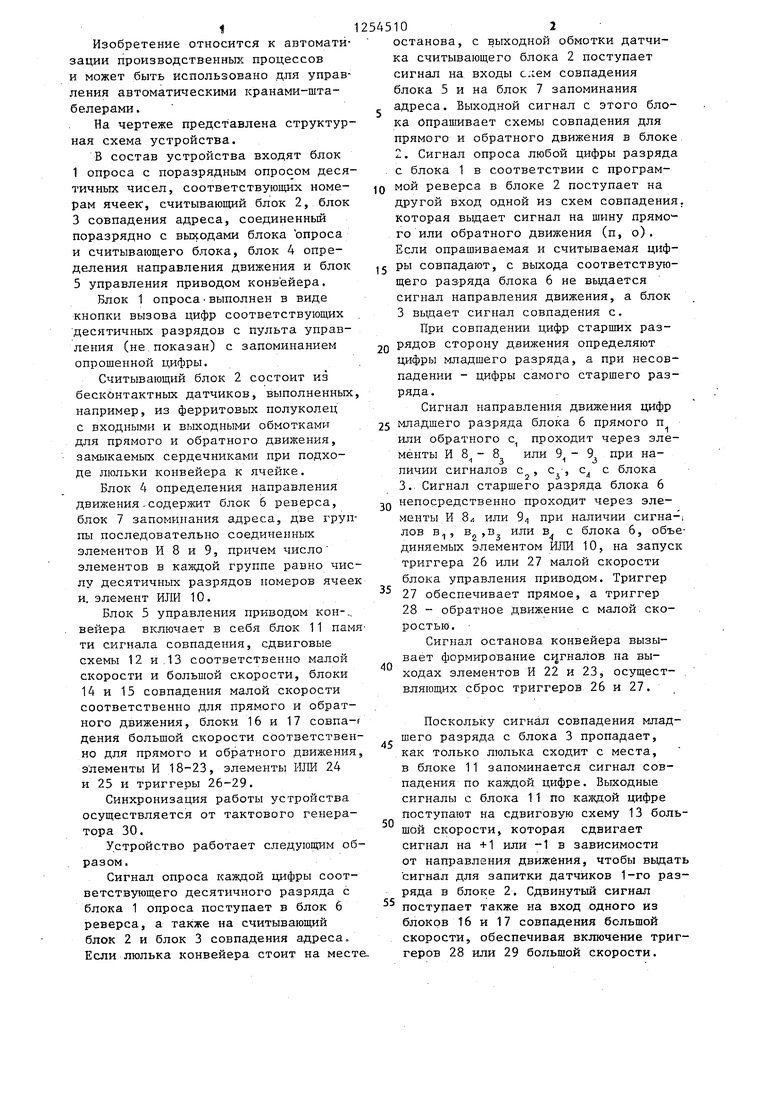

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного реверса движения люлечного конвейера | 1978 |
|
SU766986A2 |
| Устройство для программного реверса движения люлечного конвейера | 1981 |
|
SU1008112A1 |
| Обучающее устройство | 1978 |
|
SU809314A2 |
| Обучающее устройство | 1975 |
|
SU723646A1 |
| ПОСЛЕДОВАТЕЛЬНЫЙ ДЕСЯТИЧНЫЙ НАКАПЛИВАЮЩИЙ СУММАТОР С ПАРАЛЛЕЛЬНЫМ СДВИГОМ | 1969 |
|
SU250544A1 |
| Обучающее устройство | 1978 |
|
SU809315A2 |
| Устройство для регистрации цифровой информации | 1986 |
|
SU1386915A2 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
| Цифровой генератор гармонических сигналов | 1984 |
|
SU1211846A1 |
| Устройство автоматического контроля веса материала в бункерах | 1985 |
|
SU1255870A1 |

Изобретение относится к автоматизации производственных процессов и может быть использовано для управ.ления автоматическими кранами-штабе- лерами. Цель изобретения - расширение функциональных возможностей уст-i ройства, которое содержит блок опроса с поразрядным опросом десятичных чисел, соответствующих номерам ячеек, считывающий блок, блок совпадения адреса, соединенный поразрядно с выходами блока опроса и считывающего блока, блок управления приводом кон- вейера и блок направления движения,ко- торый содержит блок реверса, блок запоминания адреса, элементы И и элемент ИЛИ. Блок управления приводом конвейера включает блок памяти сигнала совпадения; сдвиговые схемы малой скорости и больщой скорости, блоки малой скорости для прямого и обратного движений, блоки совпадения большой скорости, элементы И, элементы ИЛИ и триггеры. Введение новых элементов и образование новых связей между элементами устройства позволяет производить дискретные изменения скорости в начале движения. 1 ил. а S ю О1 1 &1
Составитель В. Киселев Редактор А. Огар Техред И.Попович Корректор Е. Сирохман
Заказ 4723/54Тираж 671-Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий Г13035, Москва, , Раушская наб., д. 4/5
Производс твенно-полиграфическое .предприятие, г. Ужгород, ул. Проектная,4
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ МЕХАНИЗМОМ | 0 |
|
SU360666A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Позиционная система программного управления перемещением транспортного механизма | 1972 |
|
SU447341A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
