(54) ПОЗИЦИОННАЯ СИСТЕМА IIPOrPAMMFiOlX) УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ТРАНСПОГПНОГО МЕХАНИЗМА
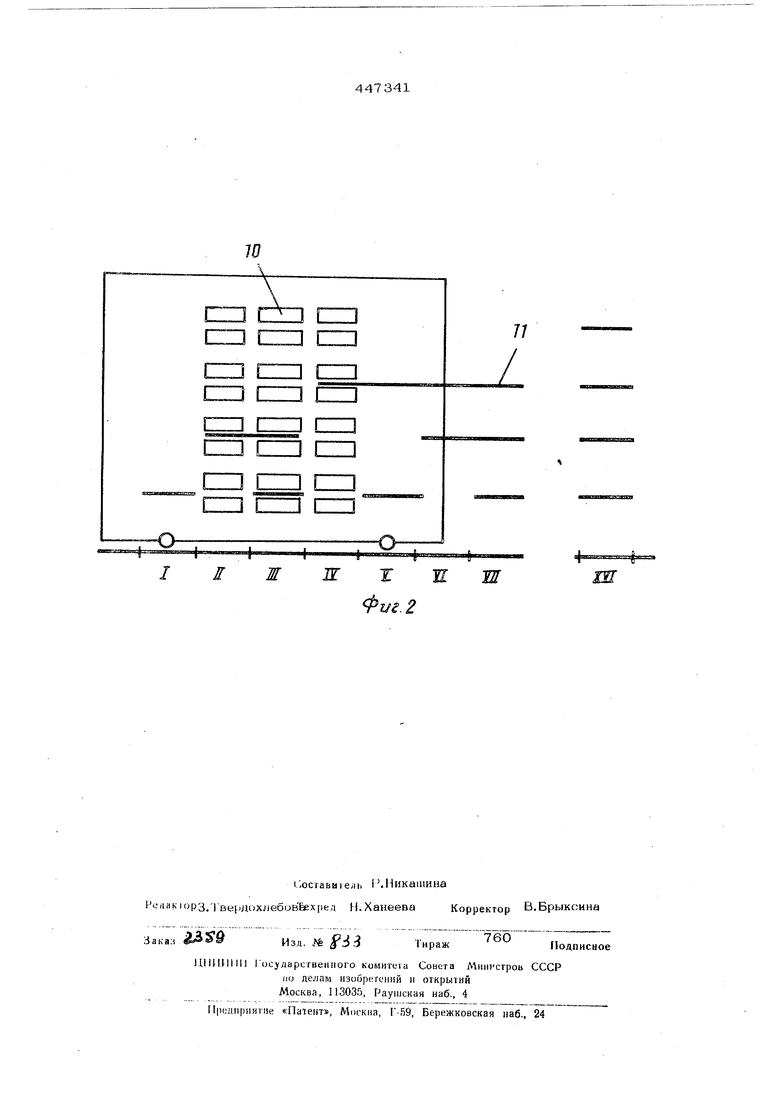
яых датчиков 1О, устанавливаемых на механизме 8 и в имодействующих с кодовы.. ми пластинами 11, расположенными вдоль трассы перемещения механизма в соответст ВИИ с обычным двоичным кодом, Количест во рядов кодовых пластин и количество дат чиков зависит от количества позихшй ад- ,ресования.
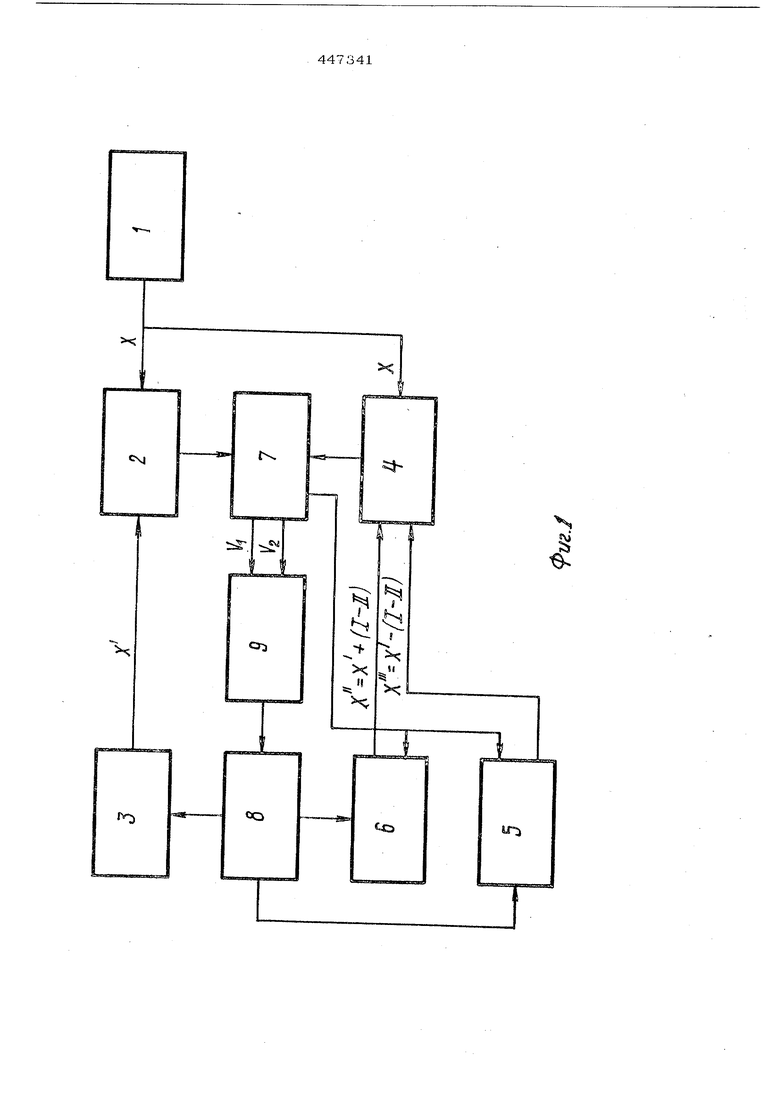
Программное устройство 1 служит для ввода и запоминания информации, в соответствии с которой механизм 8 должен перемещаться в запрограммированную пози- : ыию. Информация X на выходе программкого устройства соответствует одному из двоичных кодов. Основной 2 и вспомо гательный 4 блоки сравнения предназначены для сравнения двоичных кодов X и X; X и X или X и X.;
Основной цифратор 3 перемещения пред назначен для определения фактического положения механизма на лиш1И. Информация Xj поступающая с основного цифратора перемещетш, соответствует той позиции, на которой находится центр транспорт- иого MexamtaMa.
Вспомогательный нифратор перемеще1ШЯ 5 предназначен для вырабатывания вспомогательной информации X при перемещении мехг.1}1изма назад. Эта информация отличается от основной X сдвигом отставания на I - И позиции, т. е, Х X- (.Т-И).
Вспомогательный цифратор неремещения (j предназначен доя выраб/ тывания вспомогательной ин1 юрмацин X при перемещон.ии механизма вперед. Эта инс}хз{:ь- i отличается от основной X опережаю).ци.1 сдыпом Нс1 I-II позиции, т. е. Х X + ().
Схема 7 блокировок построена так, что при движении вперед работают основной
3и вспомогательный б цифраторы перемещений- При движении назад работают основной 3 и вспомогательный 5 цифраторы иеремещенйй.
Предлагаемая позтгшюнная с}1стема ра6отае1 следующим образом.
Центр механизма 8 или основ 1ой цифрато) 3 перемещения находится па 11 позиции. Требуется перемещение NJexaHii3ма к У1 позиции. Предварительное отключение новышеиной скорости должно прои3oiiTSi :ia одну позицию (т. е. на Y пози- нни) до позиции останова VI .
с; нрограмл)ного устройства 1 поступает UHijjopManuH X (в заданном случае Х-УТ) пи основной 2 и вспомогательный
4блоки сравнения. Основной ннфратор шерьмещенкя 3 выдает ин4«рмацию о действительном положеюга механизма на линии X 111. Так как X X, т. е. то основной блок сравнения определяет, что перемещение следует произвести от III позиции к VI , т. е. двигаться впе-i ред. При этом вспомогательному цифра-, тору 6, расположенному относительно ос- ровного 3 со сдвигом на I позиш1ю, посту 51ает разращение со схемы блокировки 7 на заботу.
: На второй вспомогательный цифратор 5 В этом случае поступает запрет со схемы блокировок 7. Таким образом, на вспомо гательный блок сравнения 4 поступает информация Х- VI и вспомогательная информация Х X + I in+I-IV
Как основной, так и вспомогательный блоки сравнения через схему блокировок блока управления приводом механизма выдает сигнал на привод 9 - перемещение вперед . Этот признак используется для включе шя повыщенной скорости перемеще1гая V, ( V V ). начинается перыещение механизма на повыще1шой скорости. Эта скорость будет включена до тех пор, пока вспомогательный цифратор перемещения 6 не достигнет позиции VI . При перемещении мез анизма вперед система бесконтактных щелевых И1щуктивных дат.чиков основного 3 и вспомогательного цифратора б взаимодействует с кодовыми пластинами 11, расположенными вдоль трассы перемещения меха1шзма. При подходе вспомогательного цифратора б к позиции останова VI информация, поступающая р вспомогательного цифраэюра, будет соответствовать Х X Vr , а с основного цифратора 3 будет соответствовать . Это равенство слу.жит признаком для ключеюш V на V . Механизм будет
продолжать перемещение вперед на пониженной скорости на позиции VI , т. е, позиция останова, где X X. I Система работает аналогично при программировании движения назад. При этом работают основной и вспомогательный цифраторы 3 и 5 перемещения.
Предмет изобретен и.я
Позиционная система програмносо управления перемещением транспортного механизма, содержащая блок ввода программы, сое 1иненный с входом блока сравнения, блок туправлення приводом механизма и установ.ленный на транспортном механизме датчик перемет ения, соединенный с другим входом блока сравнения, отличающаяся тем.
что, с целью ооесиечеиня JOMHOCTH останова транспортного механизма в соответствующей с1Дре(;ион позиции, но обе стороны от датчики переме1иения, выпрл11енного в виде цифратора линейного перемещения, у(,:тс1иовлены вспомогательные цифраторы перемещения, подключенные к входам вспомо1-ательногч1 блока сравнения, один из
.входов которого соединен с выходом блока ввода нрограм.уТ, причем выход вспомогательно1-о блока сравнения подключен к блоку управле1Шя приводом, выходы которого соединены со вспомогательным цифратороми, а вход соединен с выходом блока сравнения, выполненного в виде цифрового нуль-органа.
«N4
г:Ь
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционная система программного управления перемещением транспортного механизма | 1983 |
|
SU1137476A2 |
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| Устройство для управления транспортными средствами | 1987 |
|
SU1437879A1 |
| Способ управления электроприводамипРи пОдАчЕ, ТОчНОМ OCTAHOBE ХлыСТОВи иХ РАСКРяжЕВКЕ | 1979 |
|
SU818863A1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для цифрового управления транспортным механизмом | 1977 |
|
SU737958A1 |
CTi
X
со
f
.
s
Со
tn,
А.
СИ
.l 41 1шДЪиш L ,1 J II ijfli I,1 LLII
CZZ3 СИ CZl
СИ
d czz си
СИ I1 ii
СИ cd СИ
7/
4ж ж т ж m
II г. 2