Изобретение относится к устройствам дистанционного управления объектами и быть использовано в автоматизированных системах управления технологическими процессами с большим числом исполнительных органов управления в химической промыш--. ленности и других отсраслях народного хозяйства.
Целью изобретения является упрощение и сокращение энергозатрат при эксплуатации системы.
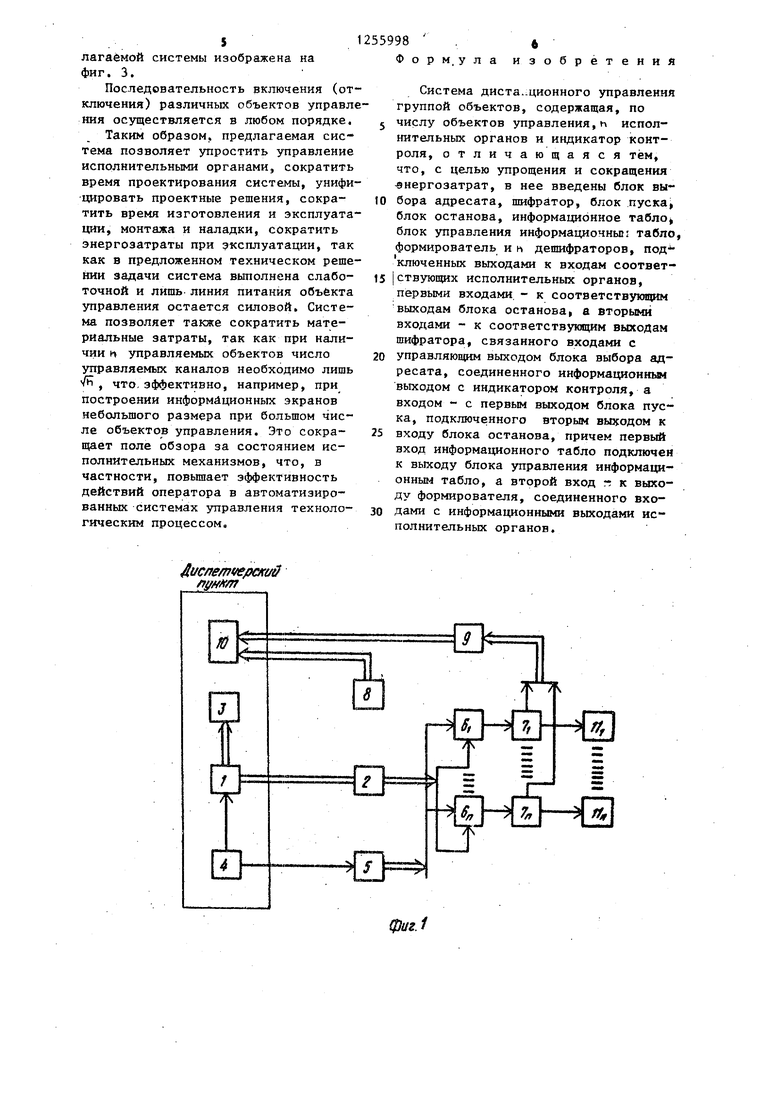
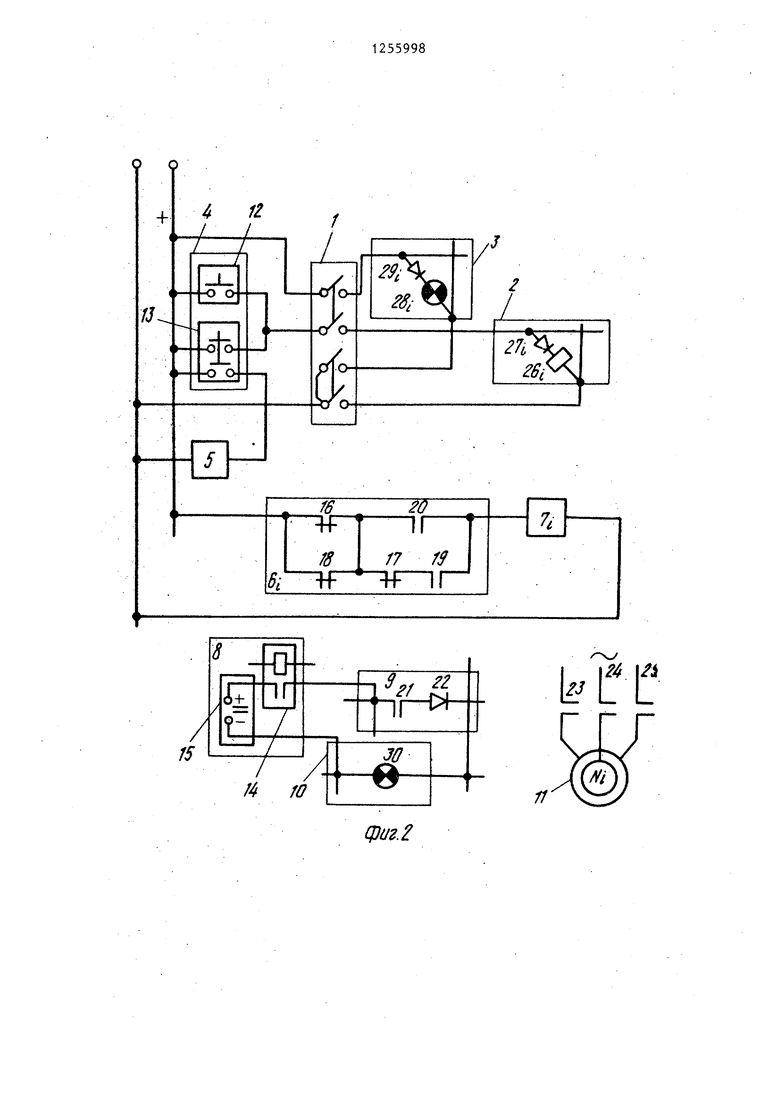
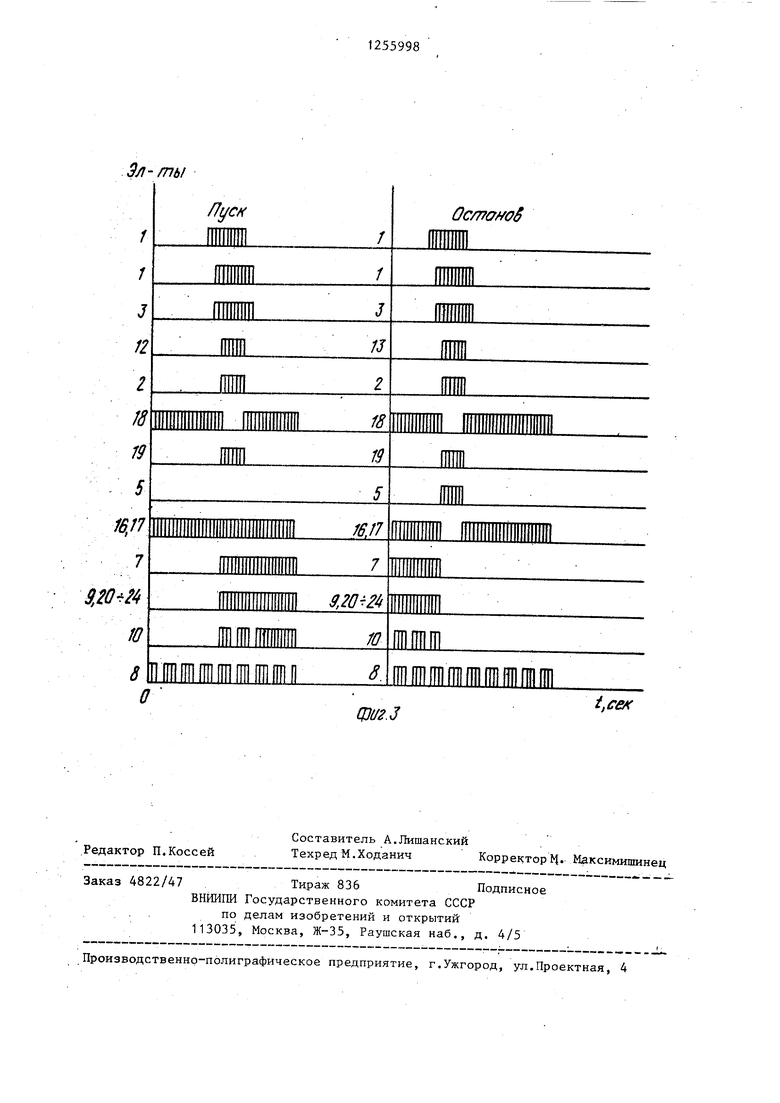
На фиг, 1 предста:влена функциональная схема системы; на фиг. 2 - блок-схема одного канала управления; на фиг. 3 - временная диаграмма работы одного канала управления,
Система содержит (фиг. 1) блок 1 ыбора адресата, шифратор 2, инди- катор 3 контроля (индикат ор контроля выбора адресата),блок 4 пуска, блок 5 останова, дешифраторы ,, исполнительные органы 7 (t блок 8 управления информационным табло, формирователь 9, информационное табло 10,, объекты упраления 11,-11j. Блок 4 пуска (фиг. 2) содержит пусковую кнопку 12 и кнопку останов 13,
Блок 8 управления информационным табло (фиг. 2) содержит элемент 14 управления питанием (реле) и источник 15 питания.
Дешифратор -6 (фиг. 2) каждого канала управления содержит исполнительные элементы 16 и 17 коммутационных узлов останова блока 5 останова, исполнительные элементы 18 и 19 коммутационных узлов пуска шифратора 2 исполнительный элемент 20 (контакт исполнительного органа 7),
Формирователь 9 (фиг. 2) (формирователь управляющей информации) содержит исполнительньй элемент 21 (контакт исполнительного органа 7) и элемент односторонней проводимости 22 (диод).
.Исполнительный орган 7 представляет собой, например, магнитньш пускатель с.исполнительными элементами (контактами) 23-25.
Шифратор 2 (фиг. 2) содержит коммутационные элементы 26. и элементы односторонней проводимости 27- .
Индикатор контроля 3 (фиг. 2) содержит элементы индикации (лампы) 28j и элементы односторонней проводимости 29, .
10
fS
20
2559982
Информационное табло 10 (фиг. 2) содержит элементы индикации 30..
Блок 1 выбора адресата конструктивно представляет собой кнопочную 5 станцию за и объектов управления, кнопочные элементы станции с зависимой фиксацией, минимальное количество элементов 2К, где К ; п- количество объектов управления.
Шифратор 2 матричного типа - координатное поле с расположенными в нем коммутационными элементами пуска. К каждой шине.поля подключено К промежуточных коммутационных элементов с разделительными элементами по напряжению.
Индикатор 3 контроля конструктивно построен по тому же принципу, что и шифратор. Такое построение блока выбора адресата матричного шифратора и матричного индикатора контроля позволяет при минимальном количестве проводников управлять максимальным количеством элементов.
Включение элементов по принципу прямоугольного координатного поля является оптимальным вариантом, при котором 2К входами можно управлять (Максимальным количеством элементов и К, что имеет решающее значение в системах с большим числом управляемых объектов.
Блок 5 останова системы включает промежуточные коммутационные элементы останова с группой НЗ исполнительных элементов.
Дешифратор 6 каждого канала управления представляет собой последовательное соединение элементов И, построенных на исполнительных элементах коммутационных элементов пуска и останова.
Исполнительный орган 7 выполнен как пускатель с группой элементов НО, управляющих силовой линией объекта управления 11 и формирователем 9.
25
30
35
40.
45
Формирователь 9 и информационное табло 10 конструктивно построены так же, как и матричньй шифратор 2 и индикатор 3 контроля. Элементами внутренней компоновки блоков 9 и 10 являются соответственно исполнительные элементы органов 7 всех каналов управления и сигнальные элементы с разделительными элементами по напряжению.
Блок 8 управления включает источ- ник питания и коммутационный элемент
(например, бесконтактные ключи, управляемые многоплечим мультивибратором или кольцевым переключателем), подающий питание в канал связи матричного формирователя 9 и информационного табло 10 (фиг. 1).
В блоке 8 управления использован принцип построчного сканирования при многоразрядном управлении, как Наиболее универсальный и конструктивно простой.
Питание системы управления слаботочное, а линия питания объекта управления - силовая.
В предложенной системе все каналы управления построены по единому принципу с использованием элементов логики. Так, выбор объекта управления и контроль правильности выбора его канала осуществляется двумя элементами (элементы И) блока 1 выбора адресата. Запуск и останов исполнительного органа объекта управления осуществляется срабатыванием элементов (элементы И) в дешифраторах со- ответствунщих каналов управления, Отображение информации по управлению - срабатыванием элементов управления (элементов И) питанием блока 8 и основного исполнительного органа 7 (фиг. 2).
Конструктивное построение системы: в диспетчерском пункте располага ются блок 1 выбора адресата, индикатор 3 контроля, блок пуска системы информационное табло, все остальные блоки располагаются в зоне оборудования технологической линии.
Из временного графика видно, что большинство элементов управления на- ходится под напряжением только в момент пуска или останова. В остальное время они обесточены.
Система дистанционного управления работает следующим образом.
Для запуска объекта управления в блоке 1 выбора, адресата набирается код адресата. Шифратор 2 в соответствии с кодом адресата подготавливает промежуточные элементы запуска соответствующего канала управления. На индикаторе 3 контроля отражается информация о правильности выбора адресата. Нажатием кнопки 12 (фиг. 2 блока 4 пуска системы подается коман да на запуск элементов пуска шифратора 2. Сигнал управления с шифратора 2 поступает на дешифратор 6 соответ
10
20
25
55
0
5
30.
5
0
ствующего канала управления. Дешиф- ратор 6, отрабатывая сигнал шифратора 2, включает исполнительный ораган 7 канала управления, который коммутирует силовую линию объекта 11 управления. Одновременно исполнительный орган 7 подает команду на формирователь 9, который, сформировав, информацию с состоянии соответствуя - щего объекта управления, посылает его на информационное ;табло . бражающее информацию по управлению.
При этом блок 8 управления ин- форма.ционным табло построчным сканированием запитывает канал связн формирователя 9 и табло 10.
После отпускания кнопки 12 (фиг. 2) блока 4 пуска напряжение с элементов пу ска (реле) шифратора 2 снимается, сигнал с дешифратора 6 также снимается, но исполнительный орган канала 7 управления остается запитанным по цепи самоблокировки. Объект 11 управления остается в рабочем положении.
При подготовке следующего канала управления путем набора кода адресата в блоке 1 выбора адресата информация о подготовке предьщущего канала управления на индикаторе 3 контроля снимается.
Подготовка и запуск последующих каналов управления йсуществляется аналогично.
Останов объекта управления осуществляется в той же последовательности, что и при пуске, только при этом в блоке 4 пуска нажимают кнопку ;13 (фиг. 2), которая представляет собой две спаренные кнопки и которая подает одновременно команду шифратору 2 и блоку 5 останова. Сигналы i этих блоков одновременно поступают на дешифратор 6 соответствующего канала управления, который, обрабатывая эти сигналы, подает команду исполнительному органу 7 соответствующего канала на отключение объекта . 11 управления. Информация о состоянии объекта осуществляется так же, как и при пуске. Останов других объектов осуществляется так же, как и в описанном случае.:
После отпускания кнопки 13 сигнал с промежуточных коммутационных элементов пуска и останова снимается.
Последовательность отработки команд исполнительными элементами пред
лагаёмой системы изображена на фиг. 3.
Последовательность включения (отключения) различных объектов управлв ния осуществляется в любом порядке.
Таким образом, предлагаемая система позволяет упростить управление исполнительными органами, сократить время проектирования системы, унифицировать проектные решения, сократить время изготовления и эксплуатации, монтажа и наладки, сократить энергозатраты при эксплуатации, так как в предложенном техническом решении задачи система выполнена слаботочной и лишь линия питания объекта управления остается силовой. Система позволяет также сократить материальные затраты, так как при наличии п управляемых объектов число управляемых каналов необходимо лишь , что. эффективно, например, при построении информационных: экранов небольшого размера при большом числе объектов управления. Это сокращает поле обзора за состоянием исполнительных механизмов, что, в частности, повьшает эффективность действий оператора в автоматизированных системах зшравлевия технологическим процессом.
4ucne/nvepGf(/d
/jyfffffff
255998
Ф о р м, у л а
изобретения
Система диета.щионного управления группой объектов, содержащая, по числу объектов управления,п исполнительных органов и индикатор контроля, отличающаяся тем, что, с целью упрощения и сокращения -энергозатрат, в нее введены блок выбора адресата, шифратор, блок пуска блок останова, информационное табло блок управления информационны табло, формирователь и и дешифраторов, подключенных выходами к входам соответствующих исполнительных органов, первыми входами - к соответствующим выходам блока останова, а вторыми входами - к соответствующим выходам шифратора, связанного входами с
управляющим выходом блока выбора адресата, соединенного информационным выходом с индикатором контроля, а входом - с первым выходом блока пуска, подключенного вторым выходом к
входу блока останова, причем первый вход информационного табло подключен к выходу блока управления информационным табло, а второй вход гг к выходу формирователя, соединенного входами с информационными выходами исполнительных органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для дистанционного управления и контроля | 1973 |
|
SU491971A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ МАШИНЫ | 2002 |
|
RU2234185C1 |
| Устройство для отладки и контроля хода программ | 1988 |
|
SU1529227A1 |
| Система коммутации | 1985 |
|
SU1317448A1 |
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Устройство для тренировки операторов | 1989 |
|
SU1714648A1 |
| Устройство для телеуправления и телесигнализации | 1978 |
|
SU748486A1 |
| Устройство для управления распределенным объектом | 1986 |
|
SU1363144A1 |
| Устройство для измерения интервалов времени | 1990 |
|
SU1739361A1 |
Изобретение относится к устройствам дистанционного управления объектами и может быть использовано в автоматизированных системах управления технологическими процессами с большим числом исполнительных орга- . нов в любых отраслях народйого хозяйства. Цель изобретения- упрощенней сокращение энергозатрат при SKcmiykTa- ции системы. Система содержит блок выбора адресата, шифратор, индикатор контроля, блок пуска, блок останова, дешифраторы, исполнительные органы, информационное табло, блок управления информационным табло, формирователь. Введение блока выбора адресата, шафратора, блока пуска, блока останова, информационного табло, блока управления информационным табло, формирователя и h дешифраторов позволяет достичь поставленной цели.. 3 ил. (Л tsD Ol СП QD CD 00
О О
/
i,
+
11
7
/
ГО
3,; //
1/ |Л
I1/ Р
L
4rf
фиг.2
Зл-ты
Редактор П.Коссей
Составитель А.Лишанский
Техред М.Ходанич Корректор {. Максимишинец
Заказ 4822/47Тираж 836Подписное
ВНЙИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Чиликин М.Г | |||
| и Сандлер А.С | |||
| Общий курс электропривода | |||
| М.: Энер- гоиэдат, 1981, ч | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ситценабивная машина | 1922 |
|
SU391A1 |
| Устройство для дистанционного управления двигателями электропривода намоточных механизмов | 1979 |
|
SU783909A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
