Изобретение относится к транспортному машиностроению, а именно к трансмиссиям самоходных транспортных средств повышенной проходимости.
Цель изобретения - повышение эффективности путем автоматизации управления приводом моста на всех режимах работы транспортного средства.
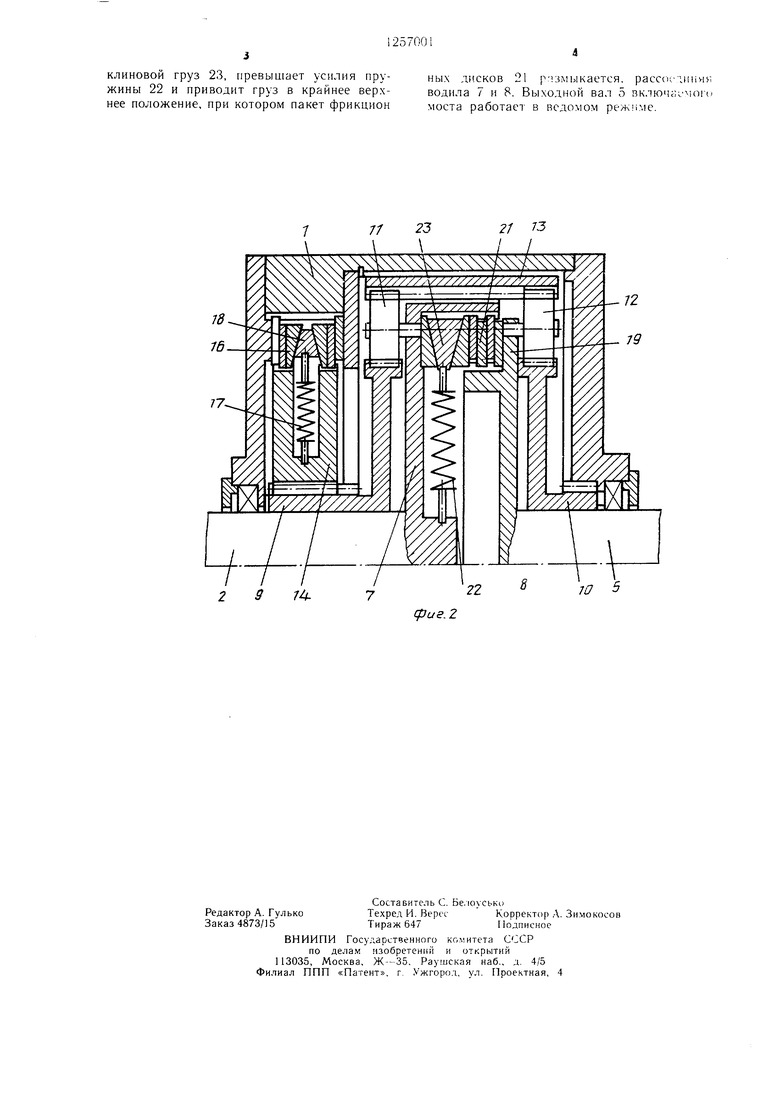
На фиг. 1 изображена кинематическая схема муфты привода моста; на фиг. 2 - то же, разрез.
Муфта привода моста транспортного средства содержит установленные в корпусе 1 входной вал 2, связанный с постоянно ве- душ.им мостом 3 через коробку передач 4, и выходной вал 5, связанный с включаемым мостом 6.
Входной 2 и выходной 5 валы соединены между собой посредством планетарной передачи, которая включает водила 7 и 8 соответственно валов 2 и 5, соответствуюш,ие солнечные шестерни 9 и 10 и сателлиты 11 и 12, которые взаимодействуют с соответствуюши- ми солнечными 9 и 10 и коронной 13 шестернями. На солнечной шестерне 9 установлена ступица 14, на которой размеш.ен нормально разомкнутый центробежный тормоз 15, содержащий пакет фрикционных дисков 16 и подпружиненный пружиной 17 клиновой груз 18, при этом упомянутый тормоз взаимодействует с корпусом 1 муфты. Водила 7 и 8 соответственно входного 2 и выходного 5 валов расположены концентрично, причем водило 7 охватывает водило 8, которое выполнено с фланцем 19. В полости, образованной цилиндрическими поверхностями водила 7 и фланца 19 водила 8, установлен нормально замкнутый центробежный тормоз 20, содержаший пакет фрикционных дисков 21 и подпружиненный пружиной 22 клиновой груз 23, при этом нормально замкнутый центробежный тормоз 20 взаимодействует с водилами.
Муфта привода моста транспортного средства работает следуюшим образом.
В исходном положении (транспортный режим работы машины) входной вал 2, связанный через коробку передач 4 с постоянно ведушим мостом 3, вращается в ведущем режиме, а выходной вал 5, связанный с включаемым мостом 6, - в ведомом режиме. При этом сателлиты 11 и 12, связанные соответственно с водилами 7 и 8 и с коронной шестерней 13, обкатываются по неподвижным солнечны.м шестерням 9 и 10. Так как солнечная шестерня 9 неподвижна, нормально разомкнутый центробежный тормоз 15 со ступицей 14 также неподвижен и, следовательно, подпружиненный пружиной 17 клиновой груз 18 находится в крайнем нижнем положении, при котором пакет фрикционных дисков 16 разомкнут. Вместе с этим нормально замкнутый центробежный тормоз 20 вращается вместе с водилом 7, вследствие чего клиновой груз 23 под действием центробежной силы находится в крайнем верхнем положении, при котором пакет фрикционных дисков 21 разомкнут.
При увеличении скорости вращения входного вала 2 по отношению к входному валу 5 (т.е. при буксовании колес постоянно ведущего моста 3) сателлит 11 вращается со скоростью, большей скорости вращения са- теллита 12, и так как он связан с неподвижной солнечной шестерней 10, а оба сателлита - с коронной шестерней 13, то сателлит 11 начинает вращать связанную с ним солнечную шестерню 9, которая в свою очередь
вращает ступицу 14 нормально разомкнутого центробежного тормоза 15. При этом клиновой груз 18 под действием центробежной силы перемещается в крайнее верхнее положение, замыкая пакет фрикционных дисков 16 на корпус 1 муфты. Вследствие этого тор0 моз 15 со ступицей 14 останавливается, останавливая и солнечную шестерню 9, и сателлит 11, взаимодействуя с остановившейся солнечной шестерней 9, передает момент вращения коронной шестерне 13, сателлиту 12,
5 фланцу 19 водила 8 выходного вала 5 включаемого моста 6, который начинает работать в ведущем режиме. Таким образом, транспортное средство преодолевает сложный участок дороги с двумя ведущими мостами. При выравнивании скоростей вращения
0 входного и выходного валов (т.е. при выходе транспортного средства из режима буксования) скорости вращения сателлитов 11 и 12 также выравниваются и упомянутые сателлиты, связанные с коронной шестерней 13, обкатываются по неподвижным солнеч ным шестерням 9 и 10. Нормально разомкнутый тормоз 15 со ступицей 14 также становится неподвижным, а пружина 17 возвращает клиновой груз 18 в исходное крайнее нижнее положение, при котором пакет
0 фрикционных дисков разомкнут. Выходной вал 5 включаемого моста 6 работает в ведомом режиме.
При малых скоростях движения транспортного средства, например в режиме чер5 пания, усилие, создаваемое пружиной 22, больше, чем центробежная сила, действующая на клиновой груз 23. При этом последний под действием упомянутой пружины приводит груз в крайнее нижнее положение, при котором пакет фрикционных дисков 21
замыкается, связывая между собой водила 7 и 8 соответственно входного и выходного валов 2 и 5.
В результате этого выходной вал 5 начинает вращаться в ведущем режиме.
5 После увеличения скорости движения транспортного средства нормально замкнутый тормоз 20 вращается с большей скоростью, а центробежная сила, действуя на
клиновой груз 23, превышает усилия пружины 22 и приводит груз в крайнее верхнее положение, при котором пакет фрикцион
ных дисков 21 р,- змыкается. расссн- шпия водила 7 и 8. Выходной вал 5 включoL lOlЧ) моста работает в ведомом .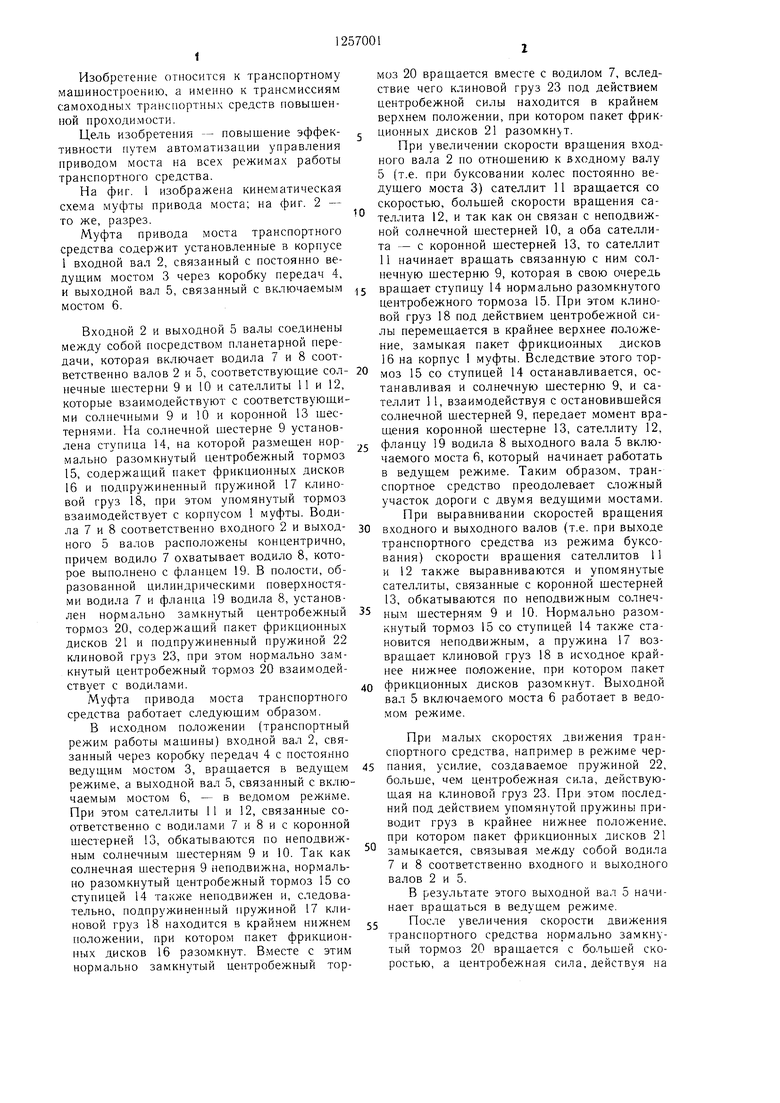
| название | год | авторы | номер документа |
|---|---|---|---|
| Муфта автоматического включения моста транспортного средства | 1987 |
|
SU1428608A1 |
| Устройство автоматического включения моста транспортного средства | 1983 |
|
SU1119869A1 |
| Муфта автоматического включения моста транспортного средства | 1988 |
|
SU1521626A1 |
| ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2460651C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2016 |
|
RU2624137C1 |
| КОРОБКА ПЕРЕДАЧ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2012 |
|
RU2495301C1 |
| КОРОБКА ПЕРЕДАЧ К АВТОТРАНСПОРТНОМУ СРЕДСТВУ | 2012 |
|
RU2481511C1 |
| РАЗДАТОЧНАЯ КОРОБКА С ИЗМЕНЯЕМОЙ АСИММЕТРИЕЙ | 2018 |
|
RU2684843C1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| КОРОБКА ПЕРЕДАЧ К ТРАНСПОРТНОМУ СРЕДСТВУ | 2010 |
|
RU2444659C1 |
JO 5
фиа.2
| Центробежная муфта привода переднего ведущего моста транспортной машины | 1982 |
|
SU1054119A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
