Изобретение относится к робототехнике и может быть использовано при создании подъемно-транспортных манипуляторов.
Целью изобретения является упрощение устройства.
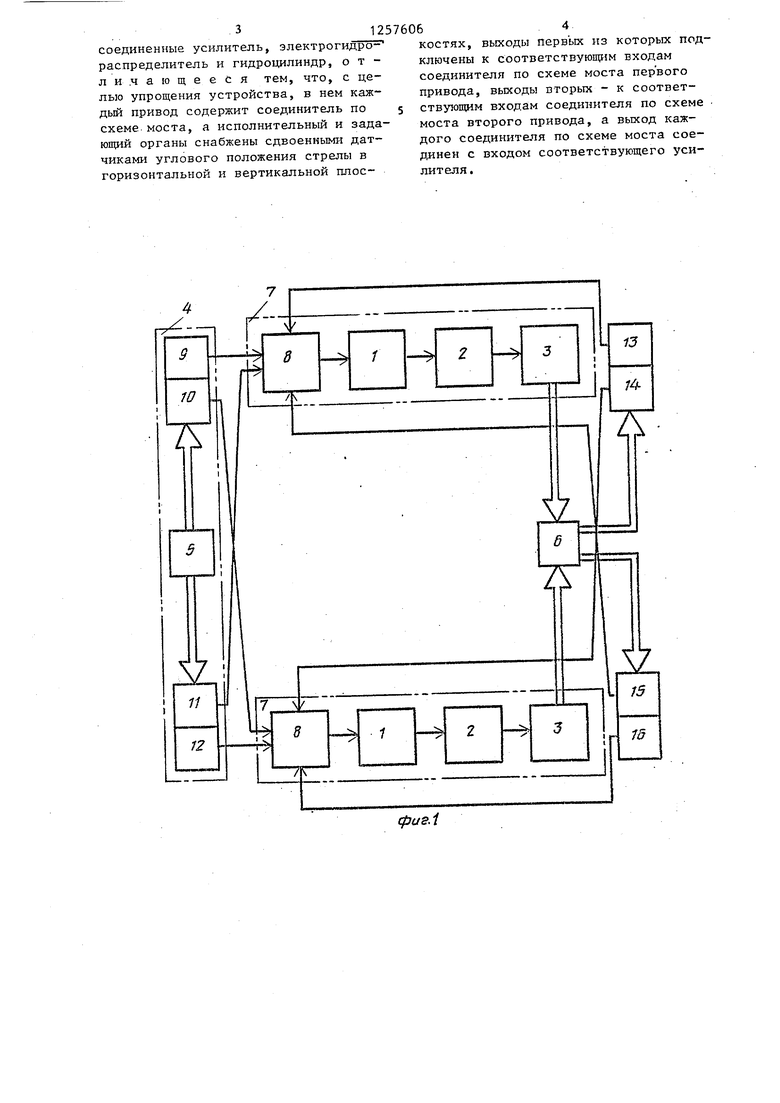
.На фиг.1 изображена функциональная схема поедлагаемого устройства; на фиг.2 - манипулятор, вид сбоку; на фи.г.3 - манипулятор, вид сверху; на фиг.4 - электрическая схема подключения датчиков одного канала привода ,
Устройство содержит усилители 1, электрогидрораспределители 2, гидроцилиндры 3, органы 4 управления, за- дaЮIЩ й орган 5, исполнительньш орган 6, приводы 7, соединители 8 по схеме моста, сдвоенные датчики 9 и 10 положения стрелы задающего органа в горизонтальной плоскости, сдвоенные датчики 11 и 12 положения стрелы задающего органа в вертикальной плоскости, сдвоенные датчики 13 и 14 положения стрелы исполнительного органа в горизонтальной плоскости, сдвоенные датчики -15 и 16 положения стрелы исполнительного органа в вертикальной плоскости, а также плиту 17, поводок 18, плиту 19 и поводок 20.
Устройство работает следующим образом.
При равенстве угловых положений задающего органа 5 и исполнительного органа 6 сопротивления, например, датчиков 9,13,15 и 11, подключенных к первому каналу привода гидроцилиндра 3, образуют симметричную систему (фиг.4). В этом случае напряжение на выходе усилителя 1 обеспечивает ней-- тральное положение электрогидрорас- пределителей 2, в котором обе полости неподвижны до появления воздействия оператора на задаюи1ий орган 5 или до изменения, например, из-за скачкообразного приложения нагрузки положения стрелы органа 6.
При неравенстве сопротивлений плеч на входе соединителя 8 вследствие указанных причин напряжение в средней точке изменяется, что приводит к изменению выходного напряжения усилителя 1 и соответственно к ншо золотника гидроэлектрораспреде- лителя 2 относительно нейтрального положения. В этом случае одна из полостей гидроцилиндра 3 оказывается соединенной с напорной, а противопо12576062
ложная - со сливной магистралями электрогидрораспределителя 2, шток гидроцилиндра 3 начинает перемещаться, обеспечивая отслеживание стре5 лой исполнительного органа 6 положения задающего органа 5. Скорость отслеживания зависит от величины рассогласования положения датчиков 9- 16 на задающем и исполнительном орга 0 нах 5 и 6. Чем больше величина этого рассогласования, тем сильнее изменяется напряжение на выходе соединителя 8, тем сильнее смещается золотник распределителя 2, увеличивая расход
15 рабочей жидкости, поступающей к гидроцилиндру 3 для изменения его длины, и выше скорость коррекции положения стрелы органа 6.,
При перемещении штока только одного
20 из гидроцшгандров 3 происходит разворот стрелы как в горизонтальной плоскости, так и в вертикальной. При этом изменяются сопротивления как датчиков 9-16, управляющих тем гидроци25 линдром 35 который необходимо перемещать, так и датчиков, управляющих там гидроцилиндром 3, который в этом случае должен быть неподвижен. Поэтому выводы датчиков 9-16 подключены
30 так, что при одинаковых перемещениях задающего и исполнительного органов 5 и 6 потенциометры, подключенные в плечи полумоста, меняют свое сопротивление таким образом, что одно из
35 них увеличивается, а другое - уменьшается (фиг.4).
За счет некоторого запаздывания гидросистемы и разности рабочих давлений в гндроцилиндрах 3 вследствие
40 различной на них нагрузки может происходить некоторое отклонение движения исполнительного органа 6 от траектории задающего органа 5. Это компенсируется тем, что перемещение
/J5 штока отстающего гидрощшиндра 3 воздействует на датчики 9-16 соединителя 8, управляющего опережаюжим цилиндром, таким образом, что последний заменяет свой ход, и наоборот.
50
55
Формула изобретения
Устройство для управления манипулятором, содержащее геометрически подобные исполнительный и задающий органы, установленные под углом друг к другу и связанные между собой и со стрелой приводов, содержащих последовательно
так, что при одинаковых перемещениях задающего и исполнительного органов 5 и 6 потенциометры, подключенные в плечи полумоста, меняют свое сопротивление таким образом, что одно из
них увеличивается, а другое - уменьшается (фиг.4).
За счет некоторого запаздывания гидросистемы и разности рабочих давлений в гндроцилиндрах 3 вследствие
различной на них нагрузки может происходить некоторое отклонение движения исполнительного органа 6 от траектории задающего органа 5. Это компенсируется тем, что перемещение
штока отстающего гидрощшиндра 3 воздействует на датчики 9-16 соединителя 8, управляющего опережаюжим цилиндром, таким образом, что последний заменяет свой ход, и наоборот.
Формула изобретения
Устройство для управления манипулятором, содержащее геометрически подобные исполнительный и задающий органы, установленные под углом друг к другу и связанные между собой и со стрелой приводов, содержащих последовательно
соединенные усилитель, электрогидро распределитель и гидроцилиндр, о т - лишающееся тем, что, с целью упрощения устройства, в нем каждый привод содержит соединитель по схеме моста, а исполнительный и задающий органы снабжены сдвоенными датчиками углового положения стрелы в горизонтальной и вертикальной плоскостях, выходы перв ых из которых подключены к соответствующим входам соединителя по схеме моста пер вого привода, выходы вторых - к соответствующим входа;м соединителя по схеме моста второго привода, а выход каждого соединителя по схеме моста соединен с входом соответствующего усилителя ,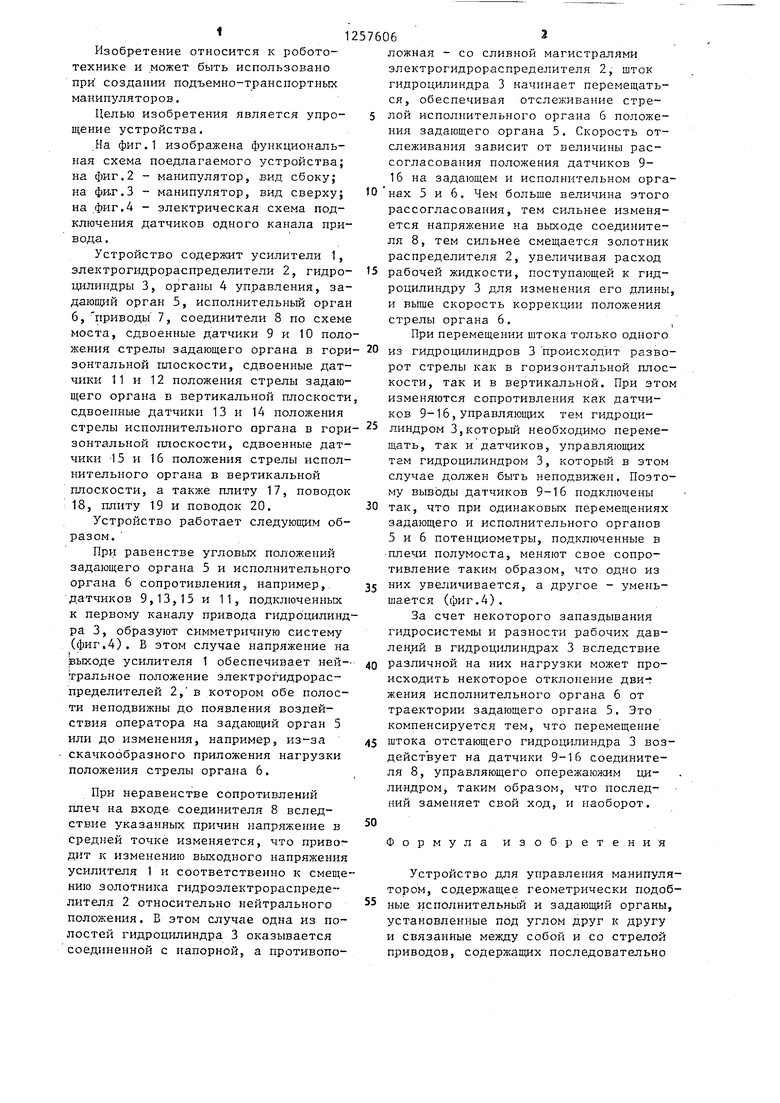
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПОДАЧИ СТРЕЛОВИДНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА ПРОХОДЧЕСКОГО КОМБАЙНА | 2011 |
|
RU2464420C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТРЕЛОВИДНЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ ГОРНОГО КОМБАЙНА | 2007 |
|
RU2349752C1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| РОБОТИЗИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ТРАКТОР-ВЕЗДЕХОД | 2022 |
|
RU2783560C1 |
| Устройство для автоматической защиты электродвигателя исполнительного органа горной машины от перегрузок | 1979 |
|
SU898057A1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Устройство для автоматической защиты электродвигателя исполнительного органа горной машины от перегрузок | 1981 |
|
SU989065A1 |
| Тракторный путепереукладчик | 1979 |
|
SU817126A1 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Устройство управления горным самоходным комбайном | 1977 |
|
SU875027A2 |
Изобретение относится к области робототехники и может быть использовано при создании транспортных манипуляторов. Путем введения блоков согласования и сдвоенных датчиков положения задающего и исполнительного органов в горизонтальной и вертикальной плоскостях упрощается устрой - ство. 4 ил.
VL
физЛ
cpuf.Z
a/4
/5
ra
J3
11
фивЗ
Составитель Г.Нефедова Редактор А.Лежнина Техред М.Ходанич Корректор А. Обручар
Заказ 4955/46 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4
| 0 |
|
SU328061A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
