Изобретение относится к области гибкого автоматизированного производства и может быть использовано в атомном машиностроении и котлострое- нии для автоматизации операций по выполнению работ, связанных с передачей изделий, имеющих различный вес, с одной позиции на другую.
Цель изобретения - повьппение быст родействия и точности позиционирования за счет аккумулирования энергии пропорционально весу переносимых изделий.
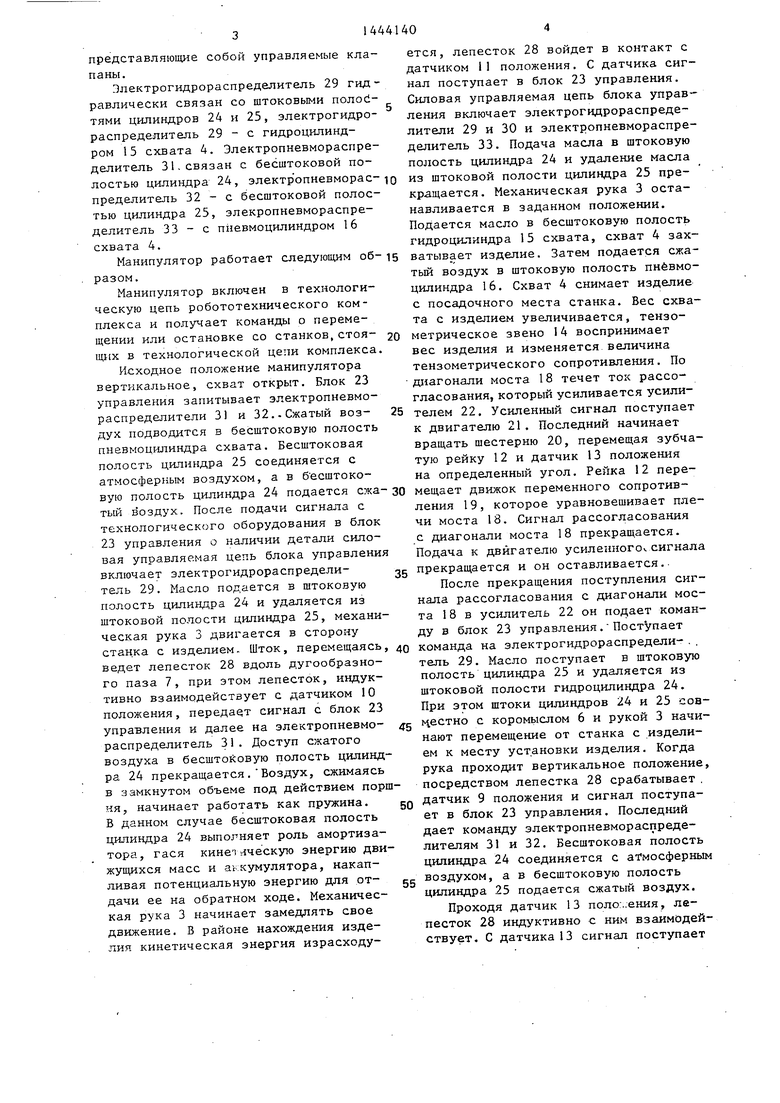
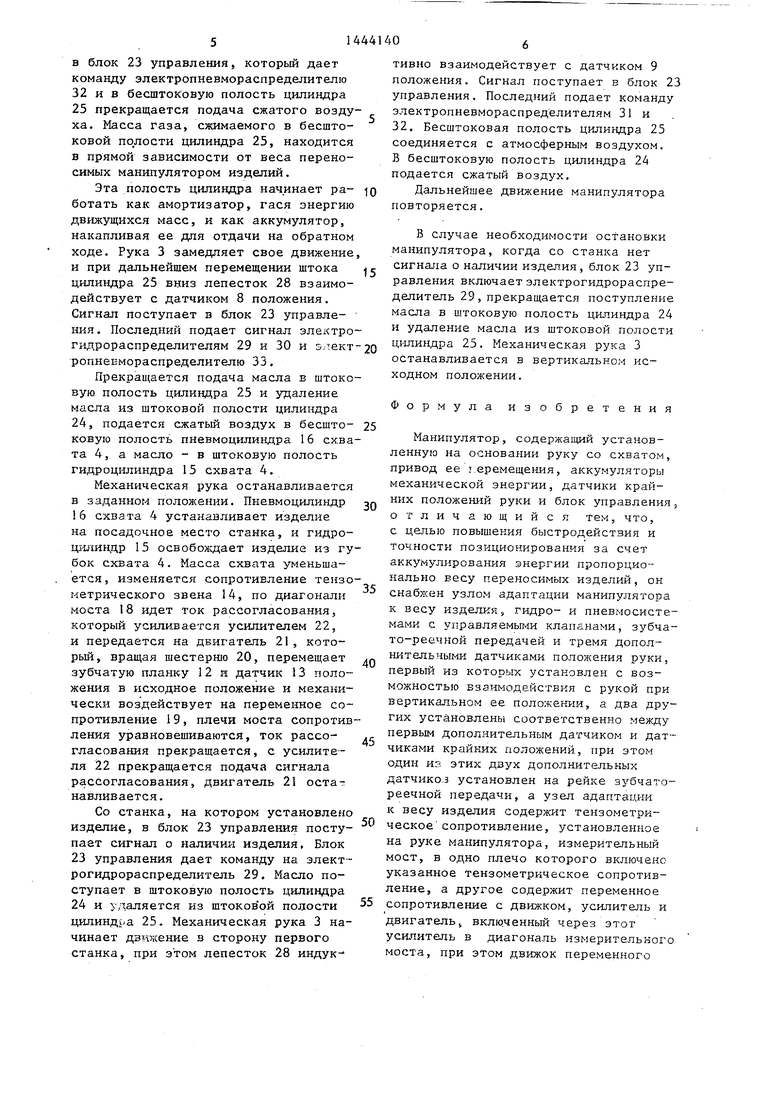
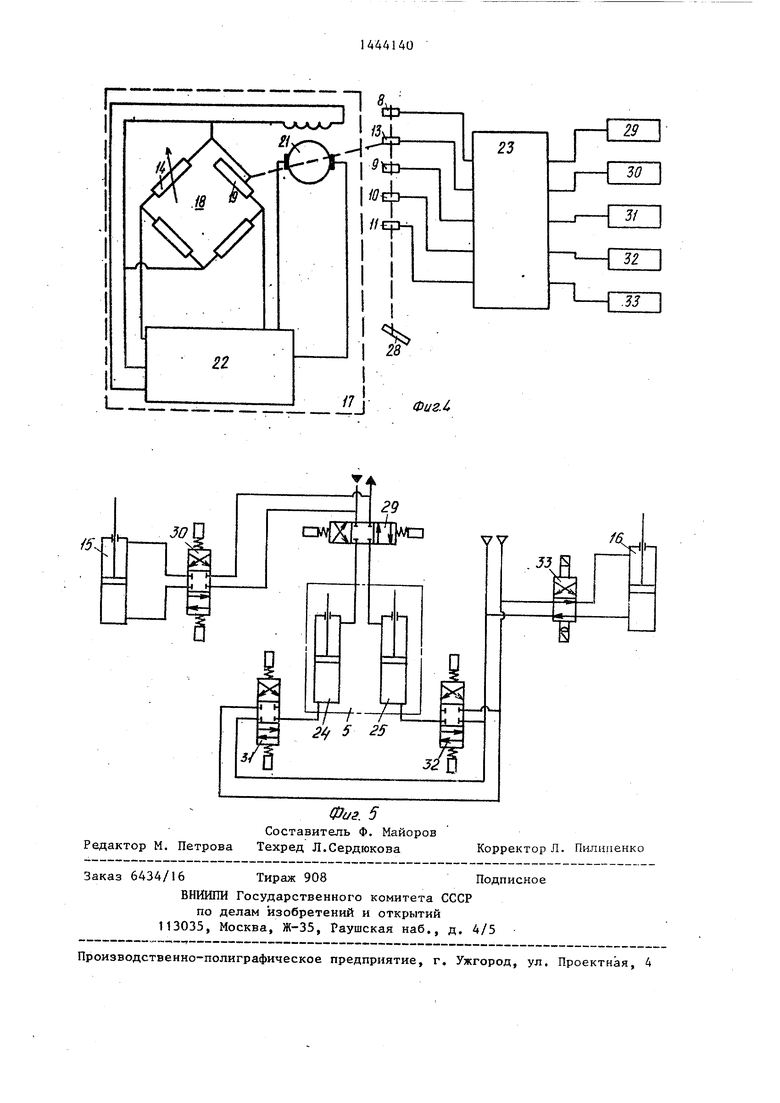
На фиг, 1 изображен манипулятор, общий вид; на фиг, 2 - вид А на фиг.1; на фиг. 3 - разрез на фиг.; на фиг. 4 - злектрыческая .схема манипулятора; на фиг. 5 - пневматическая схема манипулятора.
Маяипулятор содержит основание i, на котором шарнирио посредством оси 2 с возможностью плоскопараллельного перемещения в вертикальной .плоскости закреплена механическая рука 3 со схватом 4, имеющим губки 5. Меха-ни- ческая рука 3 представляет собой шар нирно-р 1чажный параллелограммный механизм, закрепленный на оси 2 посредством коромысла 6, нсестко связанного с ней.
По ходу вращения одного из плеч коромысла б на основании 1 выполнен дугообразный паз 7 ,в котором с БОЗ- можностью регулирования во время на-- ладки путем перемещения вдоль паза закреплены четыре планки с датчиками 8- 1 поло :ения соответственно и рейка 12 зубчато-реечной передачи, на которой закреплен датчик 13 положе- ния.
Датчики положения обеспечивают выполнение команд работы манипулятора в заданных точках рабочего пространства,
Основные датчики 8 и 1I положения соответствуют точкам установки изделия на техоборудование, отключают подачу и удаление масла из штоковых полостей цилиндров, управляют работо схвата, обеспечивающего установку ил снятие издапкя с технологического оборудования.
Положение дополнительного датчика 9 соответствует нейтральному поло жению руки 3- и обеспечивает подачу сжатого воздуха или вентилирование пневмоамортизаторов. Это нейтральное
0
5 0
г, О
д
0
5
положение соответствует вертикальному положению механической руки.
Дополнительные датчики 10 и 13 обеспечивают переход с режима свободного движения на режим торможения путем прекращения подачи сжатого воздуха в поршневую полость одного из цилиндров,В результате чего рука замедляет свое движение.
Схват 4 связан с рукой 3 через т ензометрическое звено 14. Работу схвата 4 обеспечивают гидроцилиндр 15 и пневмоцилиндр 16, выполненные в одном корпусе. Гидроцилиьщр 15 обеспечивает захват изделия, а пневмо- Ц11линдр 16 - их снятие или установ - ку на технологическое оборудование. Звено 14 является чувствительным элементом узла 17 адаптации к массе переносимых изделий. Узел 17 выполнен в виде измерительного MOCIа 18 сопротивлений, в одно из плеч которого входит тензоматрическое сопротивление звена 14, а другое образовано перемеиньгм сопротиЬлением обратной связи 19, д шкок которого механичес- ки связан с рейкой 12, находящейся в зацеплении с шестерней 20, сидящей жестко на валу двигателя 21, установ- на основании 1 . л1иагональ моста 18 и злектродви атель 21 через ус2 литель 22 связаны с блоком 23 управления. Привод-руки 3 выполнен в виде шарнирно установленных на основании 1 ГИД130ЦИЛИНДРОВ 24 и 25, закрепленных на одной высоте от основания. Бесштоковые полости этих цилиндров связань с пневмосистемой и представляют собой пневмоамортизаторы и аккумуляторы механической энергии, а штоковые полости этих цилиндров связаны с гидросистемой. Штоки цилиндров 24 и 25 шарнирно закреплены на плечах коромысла 5 симметрично относительно оси вращения механической руки 3 ,;осредством осей 26 и 27.
На ocjj 26 установлен лепесток 28, связанный, со штоком цилиндра 24 и индуктивно взаимодействующий поочередно с датчиками 8,13,9-11 положения, которые являются чувствительными элементами блока 23 управления.
Блок управления включает в себя как слаботочную, так и силовую цепь. Исполнительными элементами силовой цепи являются электромагниты .элект- рог.идрораспределителей 29 к 30 и электропневмораспределителей 31-33,
представляющие собой управляемые клапаны.
Электрогидрораспределитель 29 гидравлически связан со штоковыми полой- тями цилиндров 24 и 25, Электрогидрораспределитель 29 - с гидроцилиндром 15 схвата 4. Электропневмораспре- делитель 31. связан с бесштоковой полостью цилиндра 24, электр опневмораспределитель 32 - с бесштоковой полостью цилиндра 25, элекропневмораспре- делитель 33 - с пиевмоцилиндром 16 схвата 4.
Манипулятор работает следующим об- разом.
Манипулятор включен в технологическую цепь робототехнического комплекса и получает команды о перемещении или остановке со станков,стоя- щих в технологической цепи комплекса
Исходное положение манипулятора вертикальное, схват открыт. Блок 23 управления запитывает электропневмо- распределители 31 и 32..Сжатый воз- дух подводится в бесштоковую полость пневмоцилиндра схвата. Бесштоковая полость цилиндра 25 соединяется с атмосферным воздухом, а в б есштоко- вую полость цилиндра 24 подается ежа- тый воздух. После подачи сигнала с технологического оборудования в блок 23 управления о наличии детали силовая управляемая цег.ь блока управления включает электрогидрораспредели- тель 29. Масло подается в штоковую полость цилиндра 24 и удаляется из штоковой полости цилиндра 25, механическая рука 3 двигается в сторону стацка с изделием. Шток, перемещаясь, ведет лепесток 28 вдоль дугообразного паза 7, при этом лепесток, индуктивно взаимодействует с датчиком 10 положения, передает сигнал с блок 23 управления и далее на электропневмо- распределитель 31. Доступ сжатого воздуха в бесштоковую полость цилиндра 24 прекращается. Воздух, сжимаясь в замкнутом объеме под действием поршня, начинает работать как пружина. В данном случае бесштоковая полость цилиндра 24 выполняет роль амортизатора, гася кинечическую энергию движущихся масс и аг.кумулятора, накапливая потенциальную энергию для от- дачи ее на обратном ходе. Механическая рука 3 начинает замедлять свое движение. В районе нахождения изделия кинетическая энергия израсходуется, лепесток 28 войдет в контакт с датчиком 11 положения. С датчика сигнал поступает в блок 23 управления. Силовая управляемая цепь блока управления включает электрогидрораспреде- лители 29 и 30 и электропневмораспре- делитель 33. Подача масла в штоковую полость цилиндра 24 и удаление масла из штоковой полости цилиндра 25 прекращается. Механическая рука 3 останавливается в заданном положении. Подается масло в бесштоковую полость гидроцилиндра 15 схвата, схват 4 захватывает изделие. Затем подается сжа- тьм воздух в штоковую полость пневмоцилиндра 16. Схват 4 снимает изделие с посадочного места станка. Вес схвата с изделием увеличивается, тензо- метрическое звено I4 воспринимает вес изделия и изменяется величина тензометрического сопротивления. По диагонали моста 18 течет ток рассогласования, который усиливается усилителем 22. Усиленный сигнал поступает к двигателю 21, Последний начинает вращать шестерню 20, перемещая зубчатую рейку 12 и датчик 13 положения на определенный угол. Рейка 12 перемещает движок переменного сопротивления 19, которое уравновешивает плечи моста 18. Сигнал рассогласования с диагонали моста 18 прекращается. Подача к двигателю усилешюгох сигнала прекращается и он оставливается.
После прекращения поступления сигнала рассогласования с диагонали моста 18 в усилитель 22 он подает команду в блок 23 управления. Поступает команда на злектрогидрораспредели- . . тель 29. Масло поступает в штоковую полость цилиндра 25 и удаляется из штоковой полости гидроцилиндра 24. При этом штоки цилиндров 24 и 25 сов- нестно с коромыслом 6 и рукой 3 начинают перемещение от станка с изделием к месту установки изделия. Когда рука проходит вертикальное положение, посредством лепестка 28 срабатывает . датчик 9 положения и сигнал поступает Б блок 23 управления. Последний дает команду электропневмораспреде- лителям 31 и 32. Бесштоковая полость цилиндра 24 соединяется с атмосферным воздухом, а в бесштоковую полость цилиндра 25 подается сжатый воздух.
Проходя датчик 13 поло:..ения, лепесток 28 индуктивно с ним взаимодействует, С датчика 13 сигнал поступает
в блок 23 управления, который дает команду электропневмораслределителю 32 и в бесштоковую полость цилиндра 25 прекращается подача сжатого воздуха. Масса газа, сжимаемого в бесштс- ковой по.лости цилиндра 25, находится в прямой зависимости от веса переносимых манипулятором изделий.
Эта полость цилиндра начинает ра- ботать как амортизатор, гася энергию движущихся масс, и как аккумулятор, накапливая ее для отдачи на обратном ходе. Рука 3 замедляет свое движение и при дальнейшем перемещении штока цилиндра 25 вниз лепесток 28 взаимодействует с датчиком 8 положения. Сигнал поступает в блок 23 управления. Последний подает сигнал электро гидрораспределителям 29 и 30 и э,лект ропневмораспределителю 33.
Прекращается подача масла в штоко вую полость цилиндра 25 и удаление масла из штоковой полости цилиндра 24, подается сжатый воздух в бесшто- ковую полость пневмоцилиндра 16 схва та 4, а масло - в штоковую полость гидроцилиндра 15 схвата 4.
Механическая рука останавливается в заданном положении. Пневмоцилиндр 16 схвата 4 устанавливает изделие на посадочное место станка, и гидро- щщ шн,др 15 освобождает изделие из губок схвата 4. Масса схвата уменьшается, изменяется сопротивление тензо метрического звена 14, по диагонали моста 18 идет ток рассогласования, который усиливается усилителем 22, и передается на двигатель 21, который, вращая шестерню 20, перемещает зубчатую планку 12 и датчик 13 положения в исходное положение и механически воздействует на переменное сопротивление 19, плечи моста сопротивления уравновешиваются, ток рассо- гласования прекращается, с усилителя 22 прекращается подача сигнала рассогласования, двигатель 21 остаг навливается.
Со станка, на котором установлено изделие, в блок 23 управления поступает сигнал о наличии изделия, Блок
23управления дает команду на элект- рогидрораспределитель 29. Масло поступает в штоковую полость цилиндра
24и удаляется из штоков ой полости цилиндиа 25. Механическая рука 3 начинает движение в сторону первого станка, при этом лепесток 28 индук
0
5
о д с
5
0
тиБНо взаимодействует с датчиком 9 положения. Сигнал поступает в блок 23 управления. Последний подает команду электропневмораспределителям 31 и 32. Бесштоковая полость цилиндра 25 соединяется с атмосферным воздухом. В бесштоковую полость цилиндра 24 подается сжатый воздух.
Дальнейшее движение манипулятора повторяется.
В случае необходимости остановки манипулятора, когда со станка нет сигнала о наличии изделия, блок 23 управления включает электрогидрораспре- делитель 29, прекращается поступление масла в штоковую полость цилиндра 24 и удаление масла из штоковой полости цилиндра 25. Механическая рука 3 останавливается в вертикальном исходном положении.
Формула изобретения
Манипулятор, содержащий установленную на основании руку со схватом, привод ее перемещения, аккумуляторы механической энергии, датчики крайних положений руки и блок управления, отличающийся тем, что, с целью повышения быстродействия и точности позиционирования за счет аккумулирования энергии пропорционально весу переносимых изделий, он снабжен узлОлМ адаптации манипулятора к весу изделияS гидро- и пневмосисте- мами с управляемыми клапанами, зубчато-реечной передачей и тремя дополнительными датчиками положения руки, первый из которых установлен с возможностью взаимодействия с рукой при вертикальном ее положении, а два других установлены соответственно между первым дополнительным датчиком и датчиками крайних положений, при этом один из этих двух дополнительных датчико.з установлен на рейке зубчато- реечной передачи, а узел адаптации к весу изделия содержит тензометри- ческое сопротивление, установленное на руке манипулятора, измерительный мост, в одно плечо которого включено указанное тензометрическое сопротивление, а другое содержит переменное сопротивление с движком, усилитель и двигательJ включенный через этот усилитель в диагональ измерительного моста, при этом движок переменного
сопротивления соединен с рейкой зубчато-реечной передачи, а вал двигателя - с шестерней этой передачи, кроме того, привод перемещения руки и аккумуляторы механической энергии выполиены в виде двух силовых цилиндров, шарнирно связанных с основанием.
штоки которых шарнирно связаны с рукой симметрично относительно оси ее поворота, а штоковые и бесштоковые полости силовых цилиндров через управляемые клапаны, связанные с блоком управления, соединены соответственно с гидро- и пневмосистемами.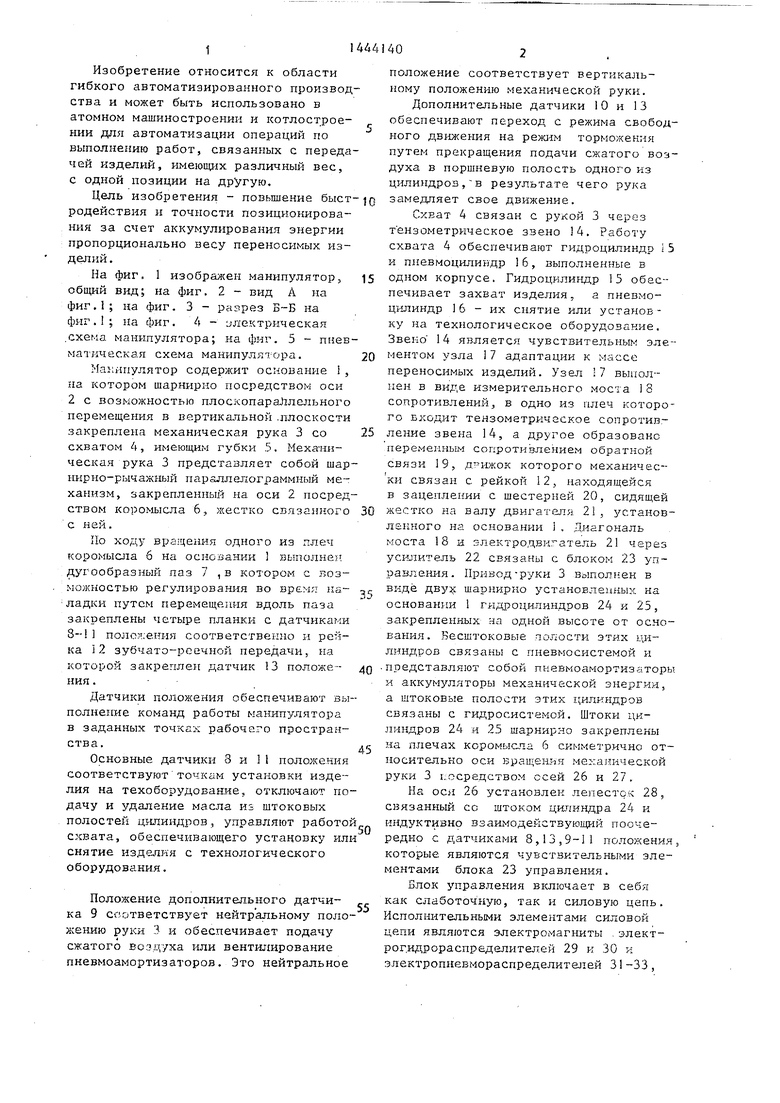
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный комплекс | 1986 |
|
SU1454686A1 |
| Устройство для отделения листа от стопы и подачи его в зону обработки | 1985 |
|
SU1338940A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Швейный роботизированный комплекс | 1986 |
|
SU1404329A1 |
| Автоматизированный комплекс для изготовления деталей из плоского материала | 1986 |
|
SU1349847A1 |
| Двухзвенное транспортное средство | 1981 |
|
SU1011398A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Запястье манипулятора | 1987 |
|
SU1433796A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
Изобретение относится к области гибкого автоматизированного производства и может быть использовано в атомном машиностроении и котлострое- нии для автоматизации операций по зыполнению работ, связанных с передачей изделий, имеющих различную массу, с одной позиции на другую. Цель изобретения - повьшение быстродействия и точности позиционирования за счет аккумулирования энергии пропорционально весу переносимых изделий. МаА нипулятор содержит установленную на основании 1 руку 3, перемещение кото рой осуществляется посредством двух расположенных симметрично относитель но оси вращения руки силовых цилиндров 24 и 25, одна из полостей которых (штоковая ) связана через управляемые клапаны с гидросистемой, а другая - с пневмосистемой. Такое выполнение привода руки 3 позволяет использовать силовые цилиндры 24 и 25 и в качестве аккумуляторов энергии. При этом величина запасаемой энергии при переносе груза регулируется перемещением датчика 13 с помощью узла адаптации манипулятора к массе захватываемого изделия, содержащего тензометрическое сопротивление, установленное на руке 3, и измерительный мост, по сигналу рассогласования которого происходит перемещение датчика 13 с помощью зубчато- реечной передачи. 5 ил. (Л . 23
±:
Вид
Фие.2
2В
Фи9.
| Промышленный робот | 1983 |
|
SU1119837A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
