Изобретение относится к автоматике 1г может быть испо.чьзоряно д.чя контроля работы и учета техиопогичес ких циклов промышленных роботов.
Цель изобретения - повышение точ- ности контроля.
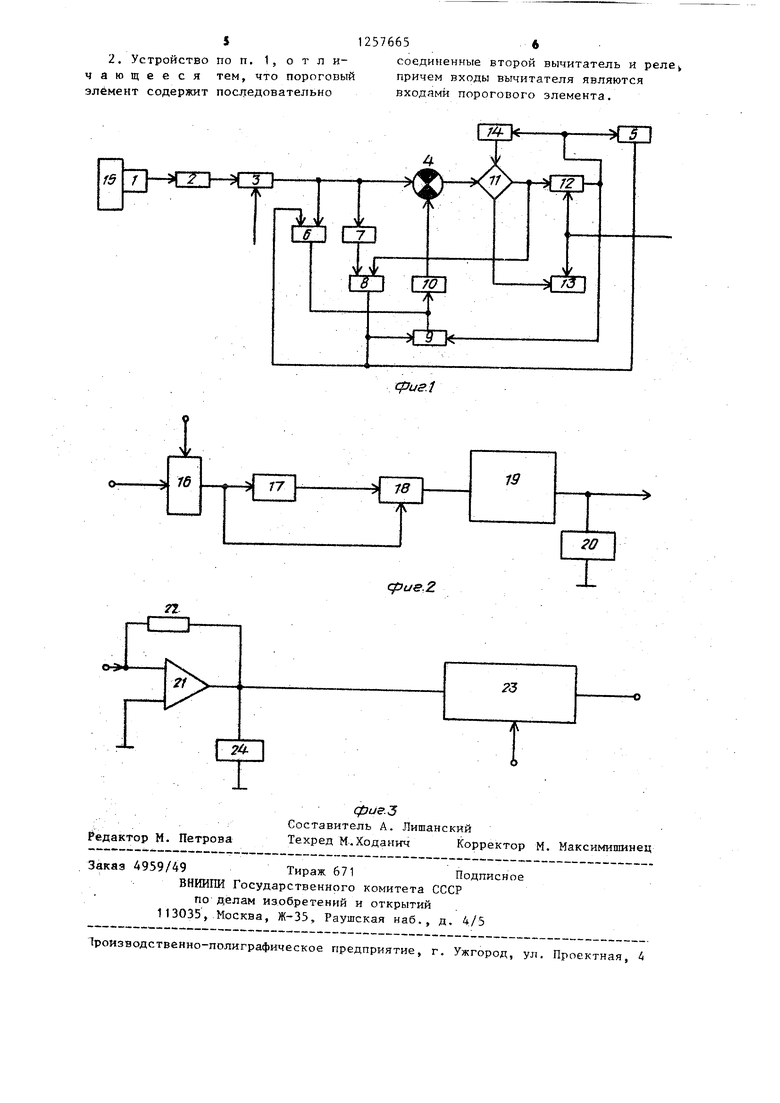
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема первого вычислительного блока; на фиг. 3 схема второго вычислительного блока.
Устройство (фиг. 1) содержит датчик 1, усилитель 2, первый вычислительный блок 3, в 1читатель 4 , формирователь 5 импульсов управления, второй ключ ft, первый элеме 1т 7 памяти, первый ключ 8, второй вычислительный блок 9, второй элемент 10 памяти, пороговый элемент VI, первый счетчик 12 циклов, второй счетчик 13 циклов, блок 14 коррекции уставки, поз. 15 - элемент конструкции робота, на которую устаыабливается датчик.
Первый вычислительный блок 3 (фиг. 2) содержит третий ключ 16, элемент 17 задерх{ки, первый умножитель 18, токоограничивающий элемент 19, пер)зый интег рирующий элемент 20. Второй вычислительный блок 9 (фиг. 3 содержит BTOpoJi усилитель 21, резистор 22, второй умножитель 23, пторой интегрирующий элемент 24.
В качестве интегрирующих элементов 20 и 24 может быть использован конденсатор, в качестве токоограни- чивающего 5)лемента 19 - потенцио- метр, в качестве формирователя 5 импульса управления - дешифратор, а блока коррекции уставки - решающий усилитель.
При распознавании правильности циклов в известном устройстве используется оценка автокорр.еляционной функции и учитывается тенденция ее изменения во времени, что позволяет повыси ь надежность и точность конт- роля и учета рабочих циклов по сравнению с устройствами, реагирующими на величину максимальной амплитуды сигнала, однако и в этом случае Точность контроля недостаточно высока, так как величина уставки порогового элемента, которая должна отражать как величину случайных вибраций и точность измерения вибрации датчиком так и точность вычисления эталонно- го значения автокорреляционной функции, остается неизменной все время работы, тогда как точность вычисле5
0
0
5
5
ния эталоннот о значения автокорреляционной функции, увеличивается с каждым правильно выполненЕгым циклом. Кроме того, при изменении вида технологического цикла работы известное устройство должно быть специально настроено на новый цикл, поэтому оно не может быть использовано в гибком автоматизированном производстве.
Сущность данного усовершенствования позволяет уменьшить, величину уставки при увеличенирг точности определения эталонного значения арто- корреляционной функции, что повьш)а- ет точность контроля правильности циклов. Введение блока контроля данных счетчика и ключа позволяет -при переходе робота на новый вид цикла .работы осуществлять автоматическую настройку устройства, что повьш)ает точность контроля и позволяет применять его в гибких автоматизированных производствах.
Устройство работает следующим образом.
Колебания или деформация во вре- MeFiK i(i элемента 15 конструкции робота воспринимаются датчиком 1 и преобразуются в э.лектрическую форму i(tl-(t).
Далее этот сигнал усиливается усилителем 2 (Aq (i) ) и поступает на пер- ,вый вход первого вычислительного блока 3, на второй вход которого из блока управления робота поступает сигнал, продолжительность которого равна продолжительности цикла работы робота..
При этом ключ 16 (фиг. 2) откры- ватеся и сигнал Ад(-Ь) поступает на вход элемента 17 задержки и на второй вход умножителя 18. С выхода элемента 17 задержки сигнал, пропорциональный АО (t - 2 ) . где t
q
Время задержки, поступает на первый вход умножителя 18. С выхо.да умножителя 18 сигнал, пропорциональный й а( q-(t-t) ,поступает на интегрирующую цепочку, содержащую токоограничивающий элемент 19 и интегрирующий элемент 20. На выходе интегрирующей цепочки возникает сигнал.
пропорциональньгй
А
g(i)g(i-o)Ji,
который при постоянном времени задержки элемента 17 (С const) совпадает с оценкой автокорреляционной функции
J Ifl(t)9U-t),
где Т - время цикла.
Эта оценка запоминается в элементе 7 памяти и поступает на вход ключа 8. Одновременно электрический
сигнал, отображающий оценку автокор- О ку автокорреляционной функции R, реляционной функции, поступает на вы- читатель 4, где сравнивается с эталонным значением R автокорреляции онной функции, разница R-R в виде электрического сигнала поступа- 5 ет на пороговый элемент 11. Если
первого цикла нового вида пос пает не только на первый вход выч тателя 4 и первьш элемент 7 памя но и через открытый второй ключ 6 второй элемент 10 памяти и далее второй вход вычитателя 4. Так как первый и второй входы вычитателя поступают одинаковые сигналы, -то f jj и счетчик 12 фиксируе правильно выполненный цикл (п Соответствующий сигнал поступает вход формирователя 5, с выхода ко рого поступает сигнал на закрыти второго ключа 6. При всех последу щих циклах работы робота второй к 6 остается закрытым.
по
Р
то сигнал поступает на
Е
второй счетчик 13, который фиксирует неверно выполненный цикл, а если пор J сигнал поступает на счетчик 12 (счетчик циклов), который фиксирует правильно выполненный цикл и на ключ 8. Последний открьгеается и сигнал R с элемента 7 памяти поступает на вход второго вычислитель- ного блока 9. Одновременно с выхода счетчика 12 на второй вход вычислительного блока 9 поступает сигнал, пропорциональный количеству правильно выполненных циклов п и вьшисляет- ся текущее среднее значение R по ансамблю
Р -У R. пГтт
Далее среднее значение R с выхода хранится как эталонное до начала следующего цикла работы робота, и на последующих циклах работы при сравнении сигналов вычитателем 4 использу- ется вычисленное значение текущего среднего. Сигнал, пропорциональный количеству правильно выполненных циклов п, с выхода счетчика 12 циклов
Формула, изобретени
1. Устройство для контроля работы промышленных роботов по авт. св. № 1198554, отличающееся тем, что, с целью повышения точност контроля, введены второй ключ,, блок коррекции уставки и формирователь
поступает также на вход блока 14 кор- импульсов управления, подключенный
рекции уставки, где вычисляется новое (более точное) значение уставки порогового элемента, которое поступает на второй вход порогового элемента 11.
При переходе на нобый технологический цикл или в начале работы робота с второго выхода системы управления робота поступает сигнал на сбрасывание показаний (обнуление) счет- чиков 12 и 13. Сигнал со счетчика 12 поступает на вход формирователя 5, который в случае, если показание
576654
счетчика п О, вырабатывает сиг)1ал, поступающий на второй вычислительный блок и сбрасывающий хранящееся там предыдущее эталонное значение оценки автокорреляционно функции. Сигнал с выхода формирователя 5 поступает также на первый вход второго ключа 6, при этом ключ 6 открывается. Таким образом, сигнал, отображаюпц11Ч оцен О ку автокорреляционной функции R, 5
М 25 0
5
первого цикла нового вида поступает не только на первый вход вычи- тателя 4 и первьш элемент 7 памяти, но и через открытый второй ключ 6 на второй элемент 10 памяти и далее на второй вход вычитателя 4. Так как на первый и второй входы вычитателя 5 поступают одинаковые сигналы, -то. f jj и счетчик 12 фиксирует правильно выполненный цикл (п 1). Соответствующий сигнал поступает на вход формирователя 5, с выхода которого поступает сигнал на закрытие второго ключа 6. При всех последующих циклах работы робота второй клич 6 остается закрытым.
Предлагаемое устройство по сравнению с известным обеспечивает более высокую точность и надежность контроля за счет более точного определения уставки порогового элемента и более точного определения эталонного значения оценки автокорреляционной функции при переходе робота на новый вид технологического цикла.
Формула, изобретения
1. Устройство для контроля работы промышленных роботов по авт. св. № 1198554, отличающееся тем, что, с целью повышения точности контроля, введены второй ключ,, блок коррекции уставки и формирователь
входом, к входу блока коррекции уставки и к выходу первого счетчика циклов, а выходом - к первому входу второго вычислительного блока и к первому входу второго ключа, выход которого связан с выходом второго вычислительного блока, а второй вход - с выходом первого вычислительного блока, причем выход блока коррекции уставки соединен с вторым входом порогового элемента и сбросовые входы счетчиков циклом - с вторым выходом системы управления роботом.
$12576656
2. Устройство по п. 1, о т л и- соединенные второй вычитатель и реле чающееся тем, что пороговый причем входы вычитателя являются элемент содержит последовательно входами порогового элемента.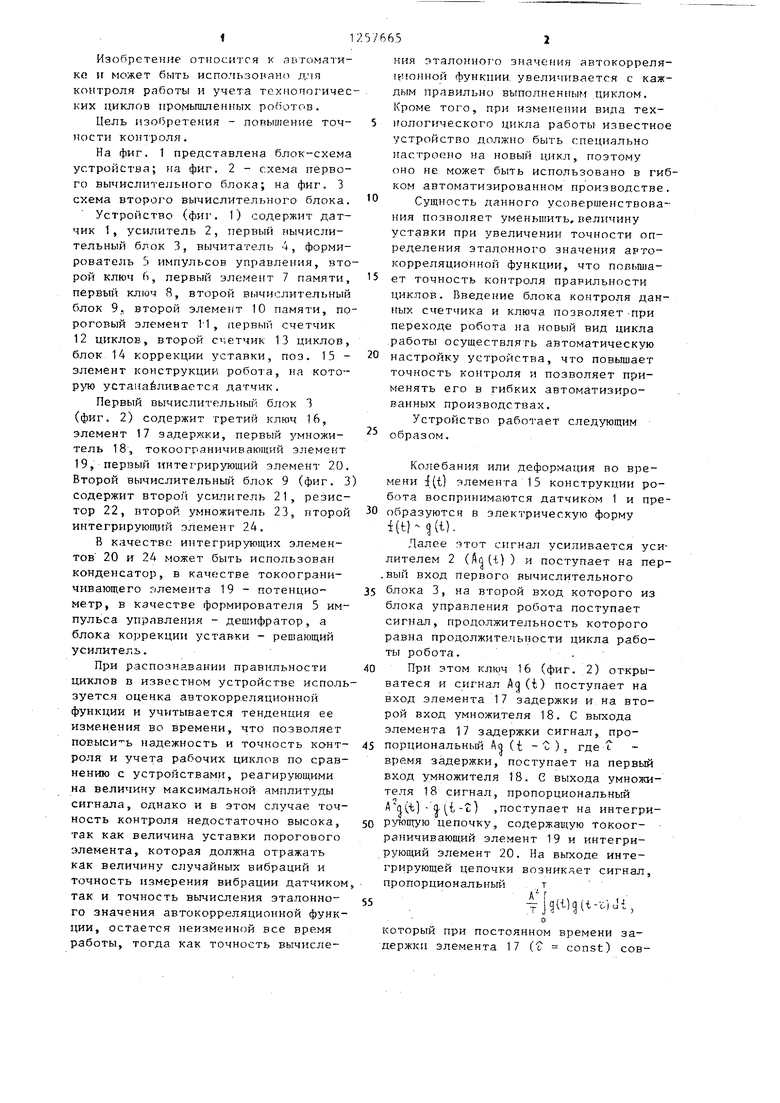

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы промышленных роботов | 1984 |
|
SU1198554A1 |
| Электроакустическое устройство для определения координат облучателя радиотелескопа | 1991 |
|
SU1795394A1 |
| Устройство для решения систем линейных алгебраических уравнений | 1984 |
|
SU1187157A1 |
| Устройство для контроля сложных объектов | 1987 |
|
SU1509833A1 |
| Устройство для контроля сопротивления изоляции сети постоянного тока | 1990 |
|
SU1774284A1 |
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| Многоканальное регистрирующее устройство | 1988 |
|
SU1698899A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| Система для контроля и управления | 1985 |
|
SU1270767A1 |
| СИСТЕМА АНАЛИЗА СЕТЕВОГО ТРАФИКА | 2007 |
|
RU2364933C2 |
Изобретение относится к oблactи автоматики и может быть использовано для контроля работы и учета технологических циклов промьшшенньк роботов. Изобретение является дополнительным к а.с. № 1198554. Целью изобретения является првьшение точности контроля за счет более точного определения уставки порогового элемента и более точного определения эталонного значения автокорреляционной функции при переходе на новый цикл технологического цикла. Цель достигается введением в устройство второго ключа, блока коррекции : уставки и формирователя импульсов управления. 1 з.п. ф-лы, 3 ил. (И с О1 ел м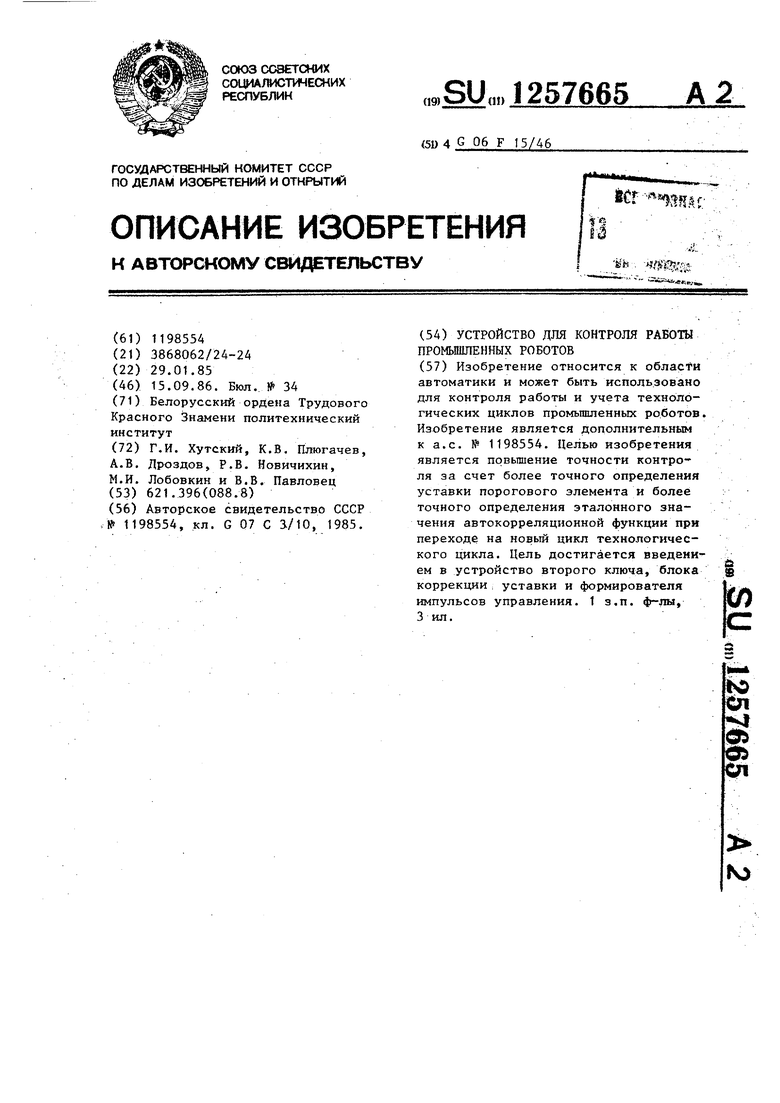
7/
Щ
Редактор М. Петрова
фие.З
Составитель А. Лишанский
Техред М.Ходанич Корректор М. Максимишинец
Заказ 4959/49Тираж 671Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, ft
fpue.Z
1
73
| Устройство для контроля работы промышленных роботов | 1984 |
|
SU1198554A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
