Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах контроля и управления перемещением сложных объектов в АСУ ТП.
Цель изобретения - повышение достоверности контроля и 1 асширение области применения.
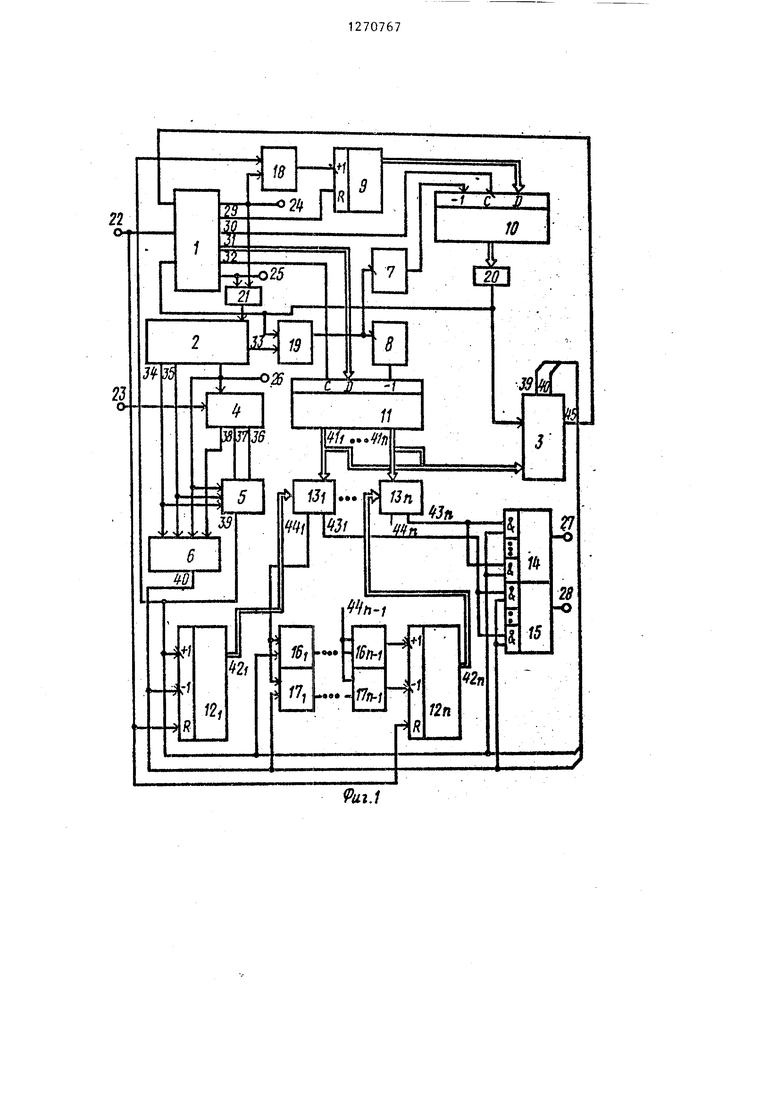
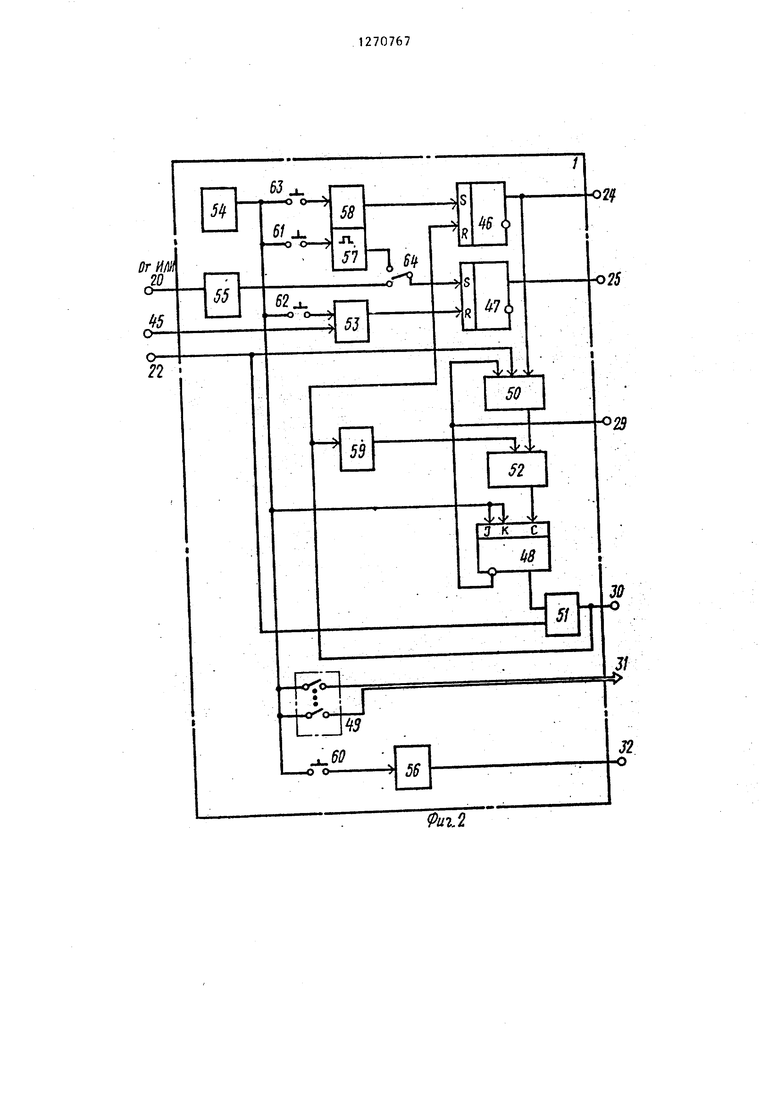
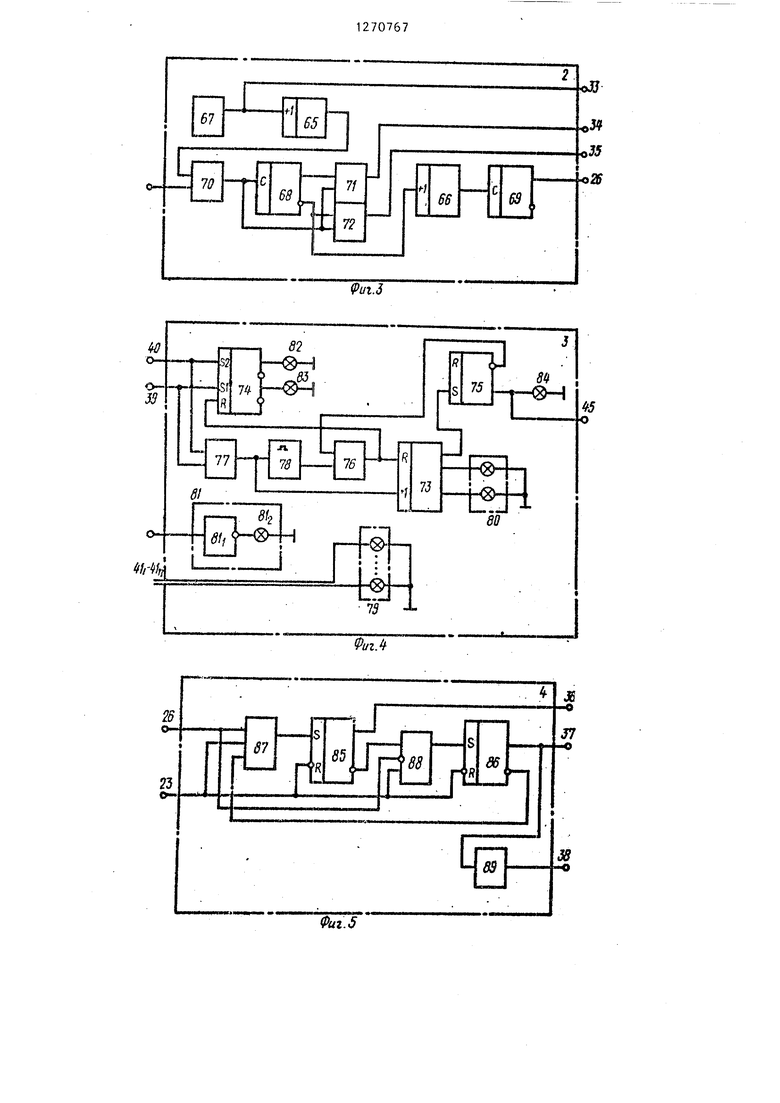
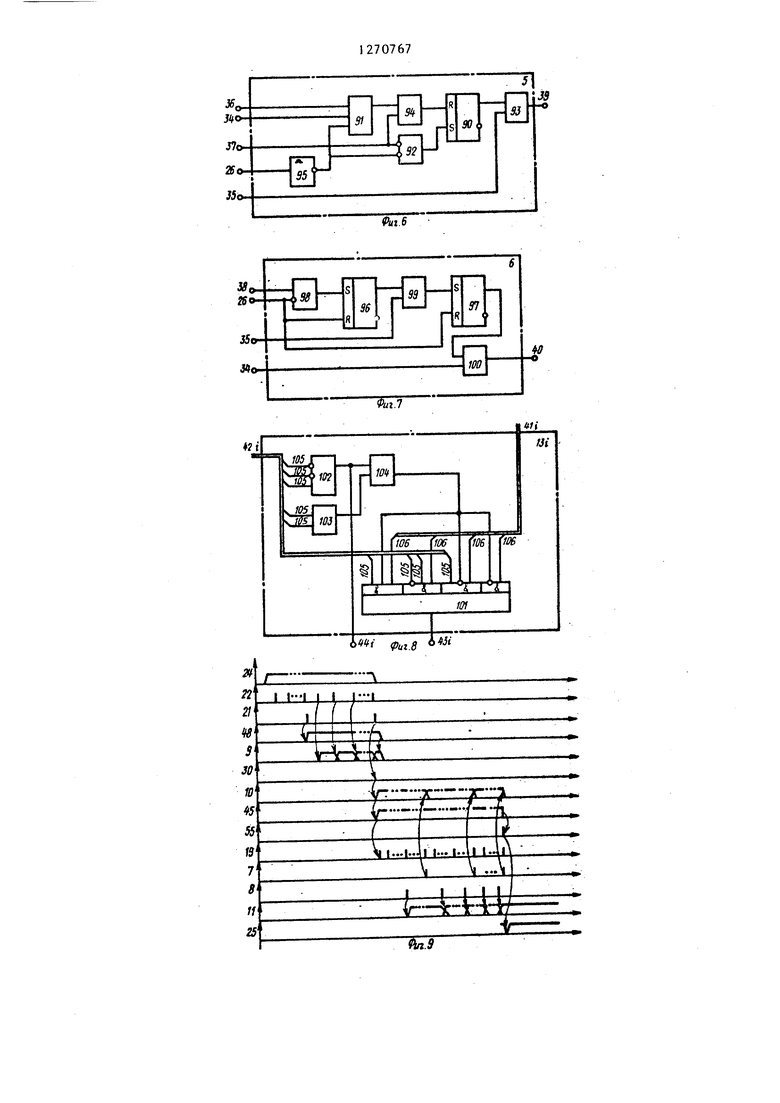
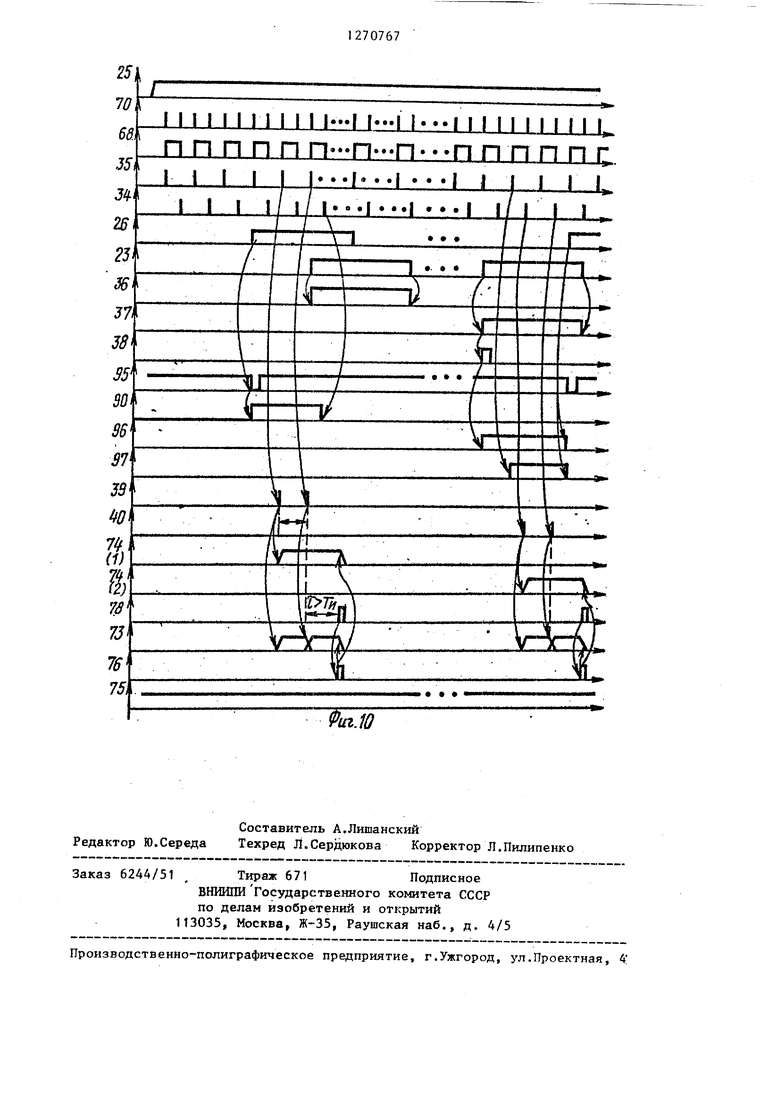
На фиг.1 приведена функциональная схема предлагаемой системы для контроля и управления; на фиг,2 - схема блока задания режима; на фиг.З -схе,ма блока синхронизагщи; на фиг.А схема блока индикации; на фиг.5-схЕма блока определения знака; на фиг.6 схема первого формирователя импуль-. сов; на фиг.7 - схема второго формирователя импульсов; на фиг.8 - схема блока коррекции; на фиг.9 и .10 временная диаграмма работы системы.
Система для контроля и управления (фиг.1) содержит блок 1 задания режима, блок 2 синхронизации, блок 3 индикации, блок 4 определения знака, первьй 5 и второй 6 формирователи импульсов, первый 7 и второй 8 делители частоты, первый 9 и второй 10 счетчики импульсов (счетчики начального отсчета), третий 11 счетчик импульсов (счетчик задания коэффициента коррекции), четвертые 12,, счетчики импульсов, блоки. 13„, коррекции, первый 14 и второй 15 коммутаторы, третьи 1б„ и четверты i п элементы И, первый И элемент И 18, второй элемент И 19, первый 20 и второй 21 элементы ИЛИ.
Входы системы: вход Нулевая отметка 22, контрольный вход 23.
Выходы системы: выход 24 Наладочньй режим, выход 25 Основной режим, выход 26 синхронизации, первый и второй выходы контроля системы 27 и 28, установочный выход 29, входы и выходы блоков системы 30-45.
Блок 1 задания режима (фиг.2) содержит первый триггер 46 (триггер наладочного режима), второй триггер 47 (триггер, основного режима), третий триггер 48 (триггер управления), регистр 49 (тумблерный регистр), первый 50 и второй 51 элементы И, п«грвьй 52 и второй 53 элементы ИЛИ, генератор 54 единицы, первый 55, второй 56, третий 57 и четвертый 5В одновибратор, элемент 59 задержки, первый . 60, второй 61, третий 62 и четвертый 63 ключи, переключатель 64.
Блок 2 синхронизации (фиг.З) содержит первьй 65 и второй 66 счетчики импульсов, генератор 67 импульсов, первьй 68 и второй 69 триггеры,
первьй 70, второй 71 и третий 72 элементы И. Блок 3 индикации (фиг.4) содержит счетчик 73 импульсов, регистр 74, триггер 75, элемент И 76, элемент ИЛИ 77, формирователь 78,
первьй 79 и второй 80 узлы индикации, первьй 81 элемент индикации, содержащий элемент НЕ 81. и индикатор 812, а также индикаторы 82-84. Блок 4 определения знака (фиг.5)
содержит первый 85 и второй 86 триггеры, первьй 87 и второй 88 элементы И, одновибратор 89. Первьй формиг рователь 5 импульсов (фиг.6) содержит триггер 90, первьй 91, второй
92, третий 93 элементыИ, элемент ИЛИ 94 и одновибратор 95. Второй формирователь 6 импульсов (фиг.7) содержит первьй 96 и второй 97 триггеры и первьй 98, второй 99 и третий
100 элементы И.
Блок 13 коррекции (фиг.8) содержит коммутатор 101, первьй 102 и втог рой 103 элементы И, элемент ИЛИ 104. Входы и выходы,элементов блока 105
и 106.
Суть дисциплины функционирования, реализуемой в системе, заключается в следующем.
В наладочном режиме осуществляется проверка датчиков объекта и производится оценка их характеристик. При этом определяется количество импульсов NJ, формируемых ими за один полньй цикл перемещения (поворота) объекта контроля. Вследствие старения их количество N может превосходить величину Ид, соответствующую коли- . честву импульсов, которые должны быть действительно вьщаны за один
цикл перемещения объекта контроля.
Производится вычисление коэффициента коррекции, являющегося функцией N и N
К„Р N,).
(1)
Действительно, значение коэффициента коррекции затем хранится в течение основного режима работы 55 объекта.
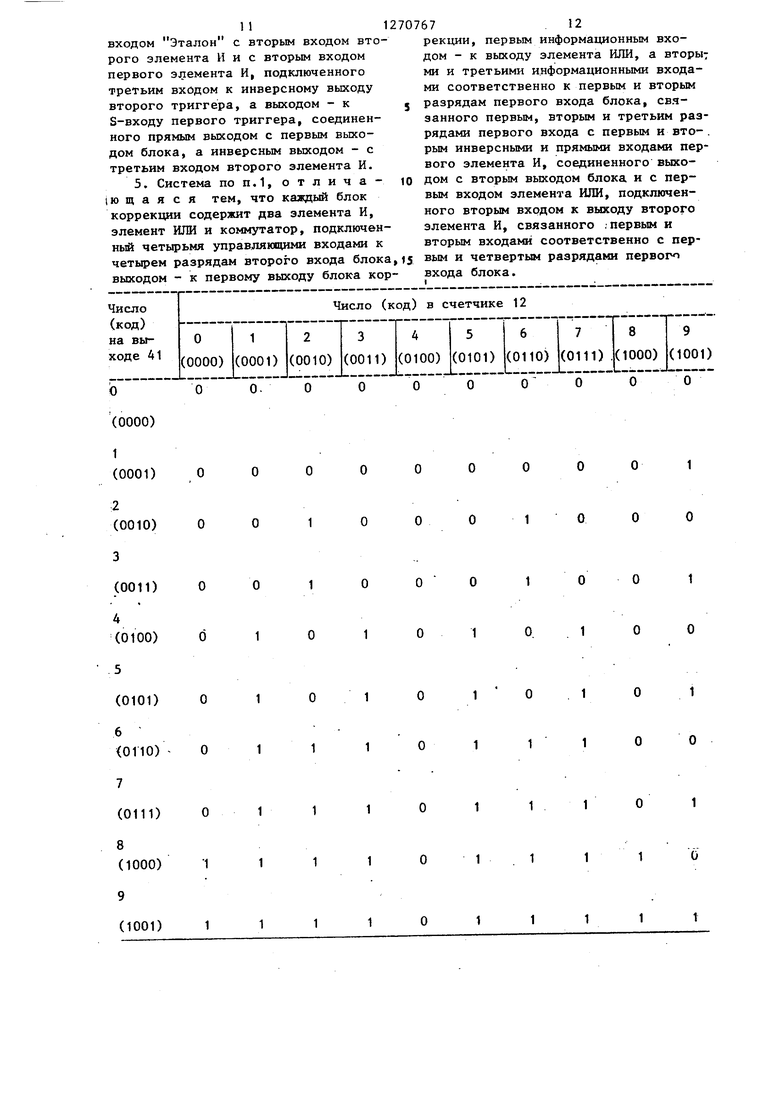
В основном режиме осуществляется определение отклонения во времени фронта сигнала to , поступающего от объекта контроля по отношению к эта лонному сигналу W(t) t -t. Величина «)(t) является контролир емым параметром, в соответствии с которым выдается определенное число импульсов, пропорциональное a)(t) M(t) (iw(t), (3) где Л - коэффициент пропорциональности. С учетом определенного действительно значения коэффициента производится коррекциявеличиныM(t) ко/ (t) где - операция коррекции. Таким образом, на выход системы поступает управляющий сигнал, параметры которого соответствуют состоя нию объекта с учетом старения его датчиков контроля. В ходе основного режима производится проверка выполнения условия M(t) М, где Мд(5р допустимое значение рассогласования . Если M(t) Мдоп что свидетельствует об аварийном режиме функционирования объекта, производится отключение системы. Система для контроля и управления работает следующим образом. В исходном состоянии все элементы памяти находятся в нулевом состоянии. Цепи установки исходного сос тояния условно не показаны. Система работает в двух основных режимах: наладочном, который включает подрежим вычисления кода коррекции, и ос новном. В наладочном режиме осуществляется определение кода коррекции датчиков. После нажатия кнопки 63 на выходе 24 блока 1 задания режима появляется единичньп сигнал, которым объект контроля переводится в наладочньй режим. В результате на выход 39 формирователя 5 начинают поступать импульсы, несущие информацию с датчиков контроля объекта. После при хода сигнала на вход элемента ИЛИ 2 который соответствует исходному положению объекта контроля, снимается запрет на запись информации в счетчике 9 (на выходе 29 блока 1 задания режима появляется нулевой сигнал) . Импульсы с выхода элемента И 18 поступают в счетчик 9, который отсчитывает их общее число между двумя сигналами нулевой отметки. После прихода на вход элемента ИЛИ 21 следующего сигнала в счетчик 9 будет записано f импульсов, число которых определяется следующим вьфажением: N,, где N - суммарное фактическое число импульсов, поступивших на вход счетчика 9 между двумя сигналами на входе элемента ИЛИ 21; N - число импульсов, соохвет-г ствующих одному циклу перемещения (поворота) объекта при использовании эталонных датчикс1В. Поскольку известна максимально возможная величина разрядность г счетчика 9 выбирается следующим образом: .сЬ (7) где i - ближайшее целое число, не меньшее, чём d . Блок 1 задания режима затем формирует сигнал на выходе 30, которым код L, записанный в счетчике 9, передается в счетчик 10. Затем счетчик 9 обнуляется сигналом с выхода 29 блока 1 задания режима (фиг.9). При этом сигналом с входа 22 также обнуляются элементы памяти блоков 416 и запрещается вьщача импульсов на выходах 26-34 и 35 блока 2 синхронизации. После этого система переходит в .режим вычисления коэффициента коррекции. Запись информации в счетчик 10 приводит к тому, что появляется единичный сигнал на выходе элемента ИЛИ 20. Этим сигналом разблокируется элемент И 19 и импульсы с выхода 33 блока 2 синхронизации череэ делители 7 и 8 начинают поступать на вычитающие входы счетчиков 10 и 1К К моменту обнуления счетчика 10 в счетчике 11 будет записан код коэффициента коррекции, который определяется выражением - .0 - N. if . где К (Kg) коэффициенты деления блоков 7 (8); J n - число десятичных разрядов счетчика 11. При n 6, N 360000, коэффициенты деления блоков 7 и 8 выбираются следующим образом: К, 100, К.. .-о После обнуления счетчика 10 на выходе элемента ИЛИ 20 появляется нулевой сигнал, которым блокируется элемент И 19. Этот сигнал поступает также на входы блока 1 задания режима и блока 3 индикации. Если система работает в ручном ре жиме, то по засвечиванию индикатора 81 блока 3 индикации основной режим инициируется кнопкой 61. При этом мо жет быть также зафиксировано значение коэффициента коррекции с помощью узла 79 индикации. Если система работает в автоматическом режиме, то сигнал, формируемьй одновибратором 55, устанавливает в единичное состояние триггер47 С появлением сигнала на выходе 25 блока 1 задания режима система переходит в основной режим функционирования. По сигналу на выходе 25 производится включение объекта контроля в основной режим функционирования и вновь разрешается вьщача импульсов на выходах 34,35 и 26 блока 2 синхронизации. С выхода 26 поступа ют эталонные стимулирующие сигналы на вход объекта контроля и входы блоков 4-6. Затем производится контроль моментов поступления сигналов на вход 23. EcлиW(t) Pj, (2), то появляется единичный сигнал на вькоде 36 блока 4 (фиг.10), которьй разреша ет прохождение импульсов с выхода 35 блока 2 через блок 5. Если (o(t) О, то блок 4 формирует сигналы на .выходах 37 и 38, по которым блок 6 вьфабатывает последовательность импульсов на вькоде 40. Число импульсов на вькоде 39 (40) блока 5 (6) пропорхщонально величине W(t). Последовательность импульсов роступает на один из счетных входов счетчика 12, управляющие входы коммутатора 14 (15) и входы блока 3 индикации. Блоки 13 - 13п коррекции в соответствии с кодом, записанным IB счетчике 11, формируют сигналы на выходах 43 и 44 таким образом, что на выход 25 (26) системы проходит 67 часть импульсов , вьщаваемых блоком 5 (6) . Величина зависит от значения коэффициента коррекции. Принцип действия блока 13 коррекции поясняется таблицей. Данная таблица описывает формирование сигналов на выходе 43г узла 13- коррекций. Если обозначить сигналы на вькоде 4lj через qj- q., а сигналы на выходе счетчика через Q,, 4 ° логическая функция, описывающая работу узла по выходу 43 будет иметь вид evf VhVK, гдее ,Q ; .Q, J h qX К qjQ.Q, ; Q, Q,,Q3. Так как импульсы на всех выходах блоков 13 коррекции на коммутаторах 14 и 15 собираются по ИЛИ, необходимо, чтобы импульсы младшей декады отсутствовали при наличии переноса старшую декаду при любом коэффициенте коррекции. Как следует из таблицы. этому условию удовлетворяет четвертый импульс счетчика 12,. Тогда сигнал переноса формируется по следукндему правилу Логические функции (9) - (15) реализуются элементами блока 13| коррекции (фиг.9). Логические функции (9) (13) реализуются коммутатором 101, логическая функция (14) - элементами И 102, 103 и ИЛИ 104, логическая функция (15) - элементом И 102. Коммутаторы 14 и 15 реализуют следукщие логические функции: ti V%.,-/ 5 , и обеспечивают вьщачу откорректированных нмпульсньпс последовательностей на выходы 25 и 26 системы. Элементы И первой и второй групп предназначены для управления,импульсов в счетчики 12J - 12 , причем I о , с если i 1 S - 35 ,j. . S,., если ,n-1
, если i 1
0 ц,
S
Ipu.M 4,- ™
(19)
где S g . ( - значение сигнала на выходе элемента И 16,- ().
Если в процессе функционирования произойдет переполнение счетчика 73, то срабатывает триггер 75 и элемент 84 индикации, сигнал с выхода 45 бло ка 3 синхронизации поступает в блок 1 задания режима и производит останов системы вследствие отказа объакта.
Таким образом, система позволяет корректировать информацию о состоянии объекта с учетом изменения характеристик его датчиков. Эффективность состоит в обеспечении высокой достоверности контроля и более широкой области применения, поскольку оно дает возможность уменьшить вероятность неправильной классификации состояния объекта, увеличить срок эксплуатации предлагаемой системы и распространить область ее использования на систему АСУ ТП, работающие в реальном масштабе времени и не имекяцие возможности частого технического обслуживания.
Формула изобретения
1. Система для контроля и управления, содержащая блок определения знака, первьш элемент. И, подключенны выходом к счетному входу первого счетчика импульсов, второй элемент И связанный первым входом с первым управляющим выходом блока синхронизации, второй счетчик импульсов, соединенньй выходами с входами первого элемента ШШ, а синхровходом - с первым выходом Запись блока задания режима, подключенного первым -входом к входу Нулевая отметка системы, а установочным выходом - с установочным входом первого счетчика импульсов, отличающаяся тем, что, с целью повьшения достоверности контроля и расширения области применения, в нее введены блок индикац11И, два формирователя импульсов, два делителя частоты, п блоков коррекции, два коммутатора, третий и п-четвертых счетчиков импульсов, (п-1) третьих и четвертых элементов И и второй элемент ИЛИ, подключенный пеивым
входом к первому входу первого элемента И, к выходу Наладочный режим блока задания режима и к выходу Наладочный режим системы, вторым входом - к выходу Основной режим блока задания режима и к выходу Основной режим системы, а выходом - к входу блока синхронизации, связанного вторым управлягадим выходом с выходом синхронизации системы, с входом Эталон блока определения знака и с первыми управлякщиьш входами первого и второго фop шpoвaтeлeй импульсов, третьим и четвертым управляющими входами - с вторыми и третьими управлякхцими входами соответственно первого и второго формирователя и fflyльcoв, подключенного информационным входом к третьему выходу блока определения знака, связанного первым и вторым вьсходами соответственно с первьп и вторым информационными входами первого формирователя и шyльсов, а контрольным входом - с контрольным входом системы, подключенной первым и вторым контрольными выходами соответственно к выходу первого коммутатора и к выходу второго коммутатора, соединенного управляющими входами с первым входом первого из четвертых элементов И, с первым входом блока индикации, с выходом второго формирователя импульсов и с вычитающим входом первого из чет в.ертых счетчиков импульсов, подключенного суммирующим входом к выходу первого формирователя импульсов, к второму входу первого элемента И, к второму входу блока, ивдикахщи, к первому входу первого из третьих элементов Инк управляющим входам первого коммутатора, установочные входы всех четвертых счетчиков импульсов подключены к первому входу блока задания режима, а выходами - к первым входам соответствующих блоков коррекции, соединенных вторьп ш входами с третьими входами блока индикации и с соответствукацими выходами третьего счетчика импульсов, связанного счетным входом с выходом второго делителя частоты, синхровходом с вторым выходом Запись блока задания режима, а информационными входами - с выходами Код коррекции блока задания резкима, подключеаного вторым входом к выходу блока индикации, связанного четвертым входом с 9 третьим входом.блока задания режима с выходом первого элемента ИЛИ и с вторым входом второго элемента И, соединенного выходом с входом второ го делителя частоты и с входом первого делителя частоты, подключенного выходами к счетному входу второг счетчика импульсовj связанного информационными входами с выходами первого счетчика импульсов, причем первьй выход каждого блока коррекции соединен с соответствующими информационными входами первого и вто рого коммутаторов, а второй выход калодого i-ro (...n) блока 4щи подключены к вторым входам j-x третьих и четвертьк элементов И (.,.n-1), выходы которых подключены к входам соответственно, (j + + ,1)-х третьих и четвертых элементов И, выходы (п-1)-х третьих и чет вертых элементов И связаны соответственно с суммирующим и вычитаю1цим входами п-го из четвертых счетчиков импульсов. 2. Система, по п.1, отлича ющая с я тем, что блок задания режима содержит элемент задержки, три триггера, четыре одновибратора четыре ключа, тумблерньй регистр, два элемента ИЛИ, два элемента И, п реключатель и генератор единицы, подключенный выходом к первым выводам всех ключей переключателя, тумб лерного регистра и к Э и К входам третьего триггера, подключенного С-входом к выходу первого элемен та ИЛИ, инверсным выходом - к устан вочному выходу блока, к первом; вхо ду первого элемента И, а прямым выходом - к первому входу второго эле мента И, соединенного вторым входом с первьм входом блока и-С вторым входом первого элемента И а - с первым выходом Запись бл ка, с входом элемента задержки и с R-БКОдом первого триггера, связанно го прямым выходом с третьим входом первого элемента И и с выходом Наладочный режим блока, соединенного вьшодом Основной режим с прямым выходом второго триггера, подключен него S-входом через нормально-замкнутый контакт переключателя к выхо ду первого одновибратора, а через нормально-разомкнутый контакт - к выходу третьего одновибратора, R-вход второго триггера подключен 67 к выходу второго элемента ИЛИ, соединенного первым входом с вторым входом блока, связанного третьим входом с входом первого одновибратора, а вторым выходом Запись - с выходом второго одновибратора, причем вторые выводы первого, второго, третьего и четвертого ключей связаны соответственно с входами второго и третьего одновибраторов, вторым входом второго элемента ИЛИ, входом четвертого одновибратора, подключенного выходом к S-входу первого триггера, вторые вьшоды тумблерного регистра соединены с выходами Код коррекции блока, а выход элемента задержки подключен к первому входу первого элемента ИЛИ, связанного вторым входом с выходом первого элемента И. 3.Система поп.1, отличаю- щ а я с я тем, что блок синхронизации содержит два счетчика импульсов, два триггера, три элемента И и генератор импульсов, подключенный выходом к первому управлякщему выходу блока и к счетному входу первого счетчика импульсов, связанного с первым входом первого элемента И, соединенного вторым входом с входом блока, а выходом - с С-входом первого триггера и с первыми входами второго и третьего элементов И, подключенных вторыми входами соответственно, к прямому и к инверсному выходам первого триггера, а выходами - соответственно к четвертому и третьему управляющим выходам блока, соединенного вторым управляющим выходом с прямым выходом второго триггера, связанного С-входом с выходом второго счетчика импульсов, соединенного счетным входом с инверсным выходом первого триггера. 4.Система по п,1, о т л и ч а ю щ а я с я тем, что блок определения знака содержит два элемента И, два триггера и одновибратор, соединенный выходом с третьим выходом блока, а входом - с вторым выходом блока и с прямым выходом второго триггера, подключенного S-входом к выходу второго элемента И, а R-входом - к первому входу второго элемента И, к R-входу первого триггера, к первому входу первого элемента Ник контрольному входу блока, соединенного
входом Эталон с вторым входом второго элемента И и с вторым входом первого элемента И, подключенного третьим входом к инверсному выходу второго триггера, а выходом - к S-входу первого триггера, соединенного прямым выходом с первым выходом блока, а инверсным выходом - с третьим входом второго элемента И.
5, Система поп.1, отлича1Ю щ а я с я тем, что каждый блок коррекции содержит два элемента И, элемент ИЛИ и коммутатор, подключенный четырьмя управлянлцши входами к четырем разрядам второго входа блока выходом - к первому выходу блока коррекции, первым информационным входом - к выходу элемента ИЛИ, а вторы7 ми и третьими информационными входами соответственно к первым и вторым разрядам первого входа блока, свяэанного первым, вторым и третьим разрядами первого входа с первым и вторым инверсными и прямыми входами первого элемента И, соединенного выходом с вторым выходом блока и с первым входом элемента ИЛИ, подключенного вторым входом к выходу второго элемента И, связанного .первым и вторым входами соответственно с первым и четвертым разрядами первого входа блока.
81
М оНэн
53.
Д
tR
61
и
«//-«
Fl-tJ
М
75
7J
5
F
75 -t
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1985 |
|
SU1325409A1 |
| Система для контроля и управления | 1985 |
|
SU1273932A1 |
| Устройство для контроля системы управления тиристорным преобразователем | 1983 |
|
SU1166214A1 |
| Система для контроля и управления | 1985 |
|
SU1334162A1 |
| Устройство для контроля и управления | 1985 |
|
SU1255997A1 |
| Устройство для контроля программных автоматов | 1988 |
|
SU1571552A1 |
| Логический анализатор | 1986 |
|
SU1432527A1 |
| Устройство для контроля и восстановления микропроцессорной системы | 1985 |
|
SU1317441A1 |
| Устройство для контроля | 1985 |
|
SU1293739A1 |
| Устройство для программного контроля | 1987 |
|
SU1464142A1 |
Изобретение относится к ооласти автоматики и вычислительной техники и может быть использовано в системах контроля и управления перемещением объектов в АСУТП. Цель изобретения расширение области применения и повышение достоверности контроля путем обеспечения возможности количественного определения времени запаздывания (опережения) реакции объекта кон .троля и формирования в соответствии с этим управляющих воздействий, обеспечения возможности коррекции формируемых управляющих воздействий при изменении в процессе эксплуатации характеристик датчиков информации. Система для контроля и управления со,держит блок задания режима, блок синхронизации, блок индикации, блок определения знака, два формирователя импульсов, два делителя.частоты, первый, второй, третий и четвертые счетчики Импульсов, п блоков коррекции, Q S два коммутатора, первый, второй, третий и четвертый элементы И, два элеО) мента ИЛИ. Цель изобретения достигается введением блока индикации, двух формирователей импульсов, делителей частоты, блоков коррекции, третьих четвертых счетчиков импульсов, двух коммутаторов, третьих и четвертых элементов И, второго элемента ИЛИ. 4 з.п. ф-лы, 10,ил. . .
f
3
Л
-о
86 J.
J I
D
38
83
о
| Устройство для контроля последовательности импульсов | 1982 |
|
SU1070556A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для контроля микропрограммного автомата | 1979 |
|
SU883911A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
