4
Изобретение относится к машиностроению и может быть использовано в механических системах управления.
Цель изобретения - повьш1ение на- дежности путем упрощения конструкции устройства.
На фиг.1 изображено устройство, общий вид; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 разрез на фиг.1; на фиг. 4 - разрез В-В на фиГ. 2;на фиг. 5 - разрез Г-Г на фиг. 2; на фиг. 6 - разрез Д-Д на фиг.1; на фиг. 7 - вид Е на фиг,1.
Рычаг управления содержит корпус I рутсоятку 2 управления, шариирно закрепленную в корпусе ) на оси 3, сопряженную с фрикционным тормозом 4 и упором 5 фиксатора 6 и снабженную пружиной 7 BO3BpaTsa в нейтральное положение. Рычаг управления снабжен установленным с возможностью вращения соосно,оси 3 рукоятки 2 управления первым кулачком 8, профилированная поверхность 9 которого сопряжена с корпусом I и фрикционным тормозом 4, и вторым кулачком 10, сопряженным через толкатель 11 с подвижным плечом 12, установленным на фиксаторе 6, а упор 5 фиксатора 6 размещен на подвижном плече 12.
В одном из положений первого кулачка 8 подвижное плечо 12 фиксатора б сопряжено с пружиной 7 возврата в нейтральное положение, а упор 5 фиксатора 6 - с рукояткой 2 .управления. В другом положении первого кулачка 8 подвижное плечо 12 фиксатора .6 сопряжено с пружиной 7 возврата в нейтральное положение , а в третьем положении - с фрикционным тормозом 4. Второй кулачок 10 жестко связан с первым кулачком 8. Привод 13 подвижного плеча 12 фиксатора 6 вьшолнен реверсивным и снабжен приводной шестерней I4 для сопряжения с зубчатой рейкой 15, установленной на первом кулачке 8, при этом уровень 16 зубьев 17 зубчатой рейки , 15 выполнен со скосом.
.Рукоятка 2 жестко связана с диском 18, имеющим впадины 19-21 для сопряжения с упором 5 фиксатора 6. Фрикционный тормоз 4 содержит пружину 22. Второй кулачок ГО снабжен профилированными поверхностями 23 для сопряжения с электрическими переключателями режимов работы рукоят
,
10
15
20
25
2583372
ки (не показаны), установленными на выступе 24 корпуса 1.
Диск 18 снабжен пальцем 25 для сопряжения с пружиной 7. Кулачки 8 и 10 установлены на оси 26, закрепленной в корпусе . Профилированная поверхность 9 содержит наклонные участки 27, сопряженные с участками
28 корпуса 1. 1
Рычаг управления работает следующим образом.:
В первом режиме работы с пружинным возвратом и фиксаторным удержанием рукоятки 2 управления первый кулачок 8 находится в первом положении (фиг.1). При отклонении рукоятки 2 от нейтрального положения фиксирование ее положений обеспечивается упором 5 фиксатора 6, сопряженным с впадинами 1 9 и 21 диска 18. Пружина 7 закручивается от взаимодействия с подвижным плечом 12 фиксатора 6 и пальцем 25 на диске 18. При смещении оператором рукоятки 2 с фиксированных положений пружина 7 возвращает ее в нейтральное положение, определяемое впадиной 20 диска 18. Для работы во втором режиме с пружинным возвратом рукоятки 2 подается первый сигнал на привод 13 подвижного плеча 12 фиксатора 6. При этом первый кулачок 8, вращаясь от привода 13 через шестерню 14 и зубчатую рейку 15 занимает свое второе положение, при котором жестко связанный с ним второй кулачок 10, воздействуя на толкатель I1 фиксатора 6, выводит его упор 5 из сопряжения с диском рукоятки 2. Подвижное плечо 12 фиксатора 6 при. этом перемещается на некоторую величину, но остается в сопряжении с пружиной 7„
В этом режиме работы рукоятка 2 при отклонении не имеет фиксированных -по аожений и при снятии с нее усилия перемещения возвращается в нейтральное положение, как и в первом режиме работы, под действием пружины 7.
Для работы в третьем режиме с фрикционным удержанием рукоятки 2 подается второй сигнал на привод 13 подвижного плеча 12 фиксатора 6. При этом первый кулачок 8 занимает свое 55 третье положение, при котором второй кулачок 10, воздействуя на толкатель I фиксатора 6, выводит его упор 5 из сопряжения с диском 18 ру30
35
40
45
50
31
коятки 2 и подвижное плечо 12 фикса тора 6 - из сопряжения с пружиной 7 Одновременпо первый кулачок 8, взаи модействуя своей профилированной пО верхностью 9 с корпусом 1, перемеща ется вдоль оси 3 рукоятки 2, сжимая пружину 22 фрикционного тормоза 4 и включает последний.
В этом режиме работы рукоятка 2 перемещается оператором, преодолевая усилие фрикционного тормоза 4,
2533374
и фиксируется, при снятии усилия пе, ремещения в любом положении фрикционным тормозом 4. Выполнение уровня 16 зубьев 17 рейки 15 со скосом
- 5 обеспечивает постоянное защемление
ее с шестерней 14 при осевом перемещении первого кулачка 10.
Выбором профилированных поверх- HocTei i 23 обеспечивается определен- 10 ная программа перехода с одного режима работы на другой.
У
ipue.1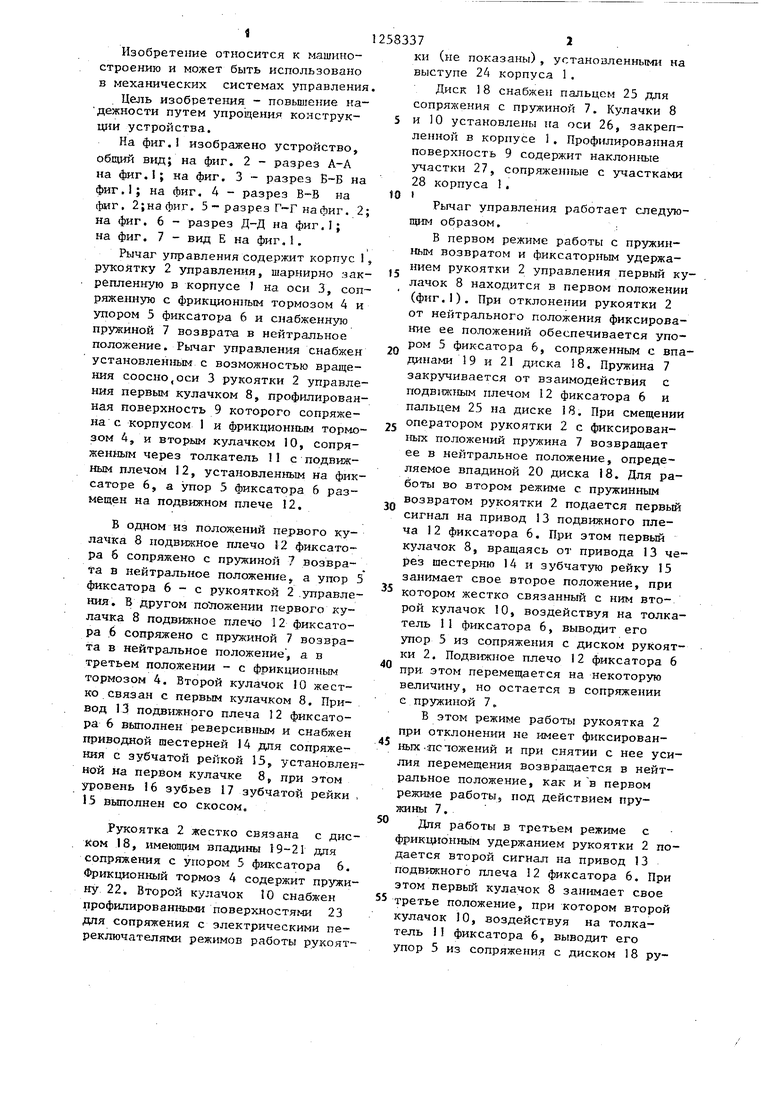


26
fat. 2
Фие.д
Г Г
2В
28
ФигЛ
Фиг.Ь
Д-Д
/ Фи.г.6
ФигЛ
Составитель и, Муханов Редактор М.Недолуженко-Техред Л.Сердюкова
Заказ 5046/61 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Ч
Корректор С.Шекмар
| Москаленко В.А | |||
| Механизм, М.: , 1969, с.10, р.4 | |||
| Узел рычага управления | 1982 |
|
SU1210672A3 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
