1258538
с выходом нуль-органа 13, вход которого соединен с выходом датчика 14 скорости и с выходом квадратора 15, выход которого соединен с входом регистра 12 памяти и с одним из входов блока 16 умножения, другой вход котоаи с ци
: .
Изобретение относится к устройствам управления беэупорным остановом I перемещающихся заготовок и быть использовано, например, для управления остано вом проката при его порезе на ножницах.
Цель изобретения - увеличение производительности за счет повышения точности останова заготовки.
На чертеже представлена функциональная схема устройства для управления безупорным остановом перемещающейся заготовки.
Устройство содержит датчик 1 пу- тев ых импульсов, выход Которого соединен с входом ключа 2, управлякиций вход которого соединен с выходом датчика 3 наличия заготовки, выход ключа 2 соединен со счетньш входом счетчика 4 пути перемещения заготовки, выход которого соединен с одним из входов элемента 5 сравнения, выход которого соединен с входом сис- 6 управления приводом транспортирующего механизма, выход ключа 2 соединен со счетным входом счетчика
7пути торможения, выход которого соединеи с входом делимого блока 8 деления, выход которого соединен с информационным входом регистра 9 памяти, выход которого соединен с первым входом фильтра 10, входы обнуления счетчиков 4 и 7 соответственно пути перемещения и пути торможения управляющий вход регистра 9 соеди- нены с выходом элемента 11 задержки, вход делителя блока 8 деления соединен с выходом регистра 12 памяти, управляющий вход которого и управляющий вход счетчика 7 пути торможения соединены с выходом элемента
5 сравнения, управляющий вход блока
8деления и вход элемента 11 задержки соединены с выходом нуль-органа
рого соединен с выходом фильтра 10, а выход - с другим входом элемента 5 сравнения, первый вход которого и второй вход фильтра 10 соединены с выходом блока 17 ввода информации. 1 ил.
0
5
0
5
0
13, вход которого соединен с выходом датчика 14 скорости транспорти- . рующего механизма, выход которого соединен также с входом квадратора 15, выход которого соединен с информационным входом регистра 12 памяти и с одним из входов блока 16 умножения, другой вход которого соединен с выходом фильтра 10, а выход - с другим входом элемента 5 сравнения, первый вход которого и второй вход фильтра 10 соединены с выходом блока 17 ввода информации.
Устройство работает следующим образом.
Требуемый путь перемещения заготовки задается на первый вход элемента 5 сравнения блоком 17 ввода ин- фьрмации. Весь путь перемещения заготовки равен суг1ме пути перемещения рт срабатьшания датчика наличия заготовки до подачи команда на торможение и пути, пройденного заготовкой при торможении до останова. При этом путь торможения прогнозируется по выражению S 63 - скорость транспортировки до момента подачи команды на торможение К - коэффициент пропорциональности.Сформированное фильтром 10 значение коэффициента К удерживается на входе блока умножения, и, если транспортирующий механизм работает, на выходе датчика 14 формируется сигнал йЗ скорости транспортировки, который проходит через квадратор 15 и в виде сигнала оэ оступает на вход блока 16 умножения, на выходе которого при этом появляется сигнал пропорциональный ожидаемой длине пути торможения, который подается на третий вход элемента 5 сравнения.
При срабатывании датчик 3 наличия заготовки срабатывает (когда в его поле зрения появляется заготовка), отпирается кл;оч 2 и импульсы от датчика 1 проходят на входы счетчиков 4 и 7. Счетчик 4 пути перемещения начинает счет сразу же, и его содержимое подается на третий вход элемента 5 сравнения, Как только сумма сигналов на первом и третьем вхо- дах элемента 5 сравнения станет равной сигналу на втором входе, на выходе элемента 5 сравнения появляется сигнал, который дает команду в .систему 6 управления приводом на останов, регистру 12 памяти на запись значения iu с которого начинается торможение, и счетчику 7 пути торможения .на начало счета. .Диаго- наль привода тормозится, заготовка останавливается. Информация о скорости движения снимается с датчика 14 скорости и, как только скорость транспортирующего механизма станет равной , срабатывает нуль-орган 13, выдает команду на начало отсчета задержки элементу 1Т и на выполнение блоком 8 деления операции деления содержимого Sf счетчика 7 пути торможения на содержимое (J регистра 12
Результат деления удерживается на выходе блока 10. К этому моменту оканчивается время задержки элемента 11, и на его выходе появляется сигнал, устанавливающий счетчики 4 и 7.в нуль и дающий команду второ му регистру 9 на запись величины К, которая затем передается для обработки в фильтр 10. Назначение фильтра 10 в том, чтобы сгладить случайные выбросы и колебания значения коэффициента К, которое используется для прогнозирования пути торможения в следующем цикле подвода и останове заготовки.
Если устройство длительное время находится в отключенном состоянии, что приводит к потере памяти, то первоначальное значе1ше К можно ввести в выходной регистр фильтра 10 из блока 17 ввода информации,
Измерение пути торможения и фильрация получаемых значений К повышае точность прогнозирования величины
пути торможения при следующем останове, не требует перехода перед остановом на пониженную скорость и, следовательно, повьшает производительность транспортирующего механизма.
Наличие квадратора, первого регистра, блоков умноже}вдя и деления позволяет прогнозировать величину пути торможения при любой скорости транспортирования.
Увеличение точности останова заготовки, в частности, под ножами ножниц поперечной резки листа -на листовом стане позволяет .увеличить выход годного металла за-счет уточнения развеса исходного сляба а уменьшения припуска на обрезь.
Формула изобретения
Устройство для управления безупор ным остановом перемещающейся заготовки, содержащее блок ввода инфор- мацш, счетчик пути перемещения, датчик скорости транспортирующего механизма, элемент сравнения, систему управления приводом транспортирующег механизма, последовательно соединенные датчик путевых импульсов, ключ и счетчик пути торможеш1я, отличающееся тем, что, с целью увеличения производительности за сче повышения точности останова заготовки, оно снабжено датчиком наличия заготовки, первым регистром памяти, блоком деления, вторым регистром памяти, фильтром, нуль-органом, элементом задержки, квадратором и блоком умножения, причем выход датчика наличия заготовки соединен с управляющим входом ключа, вьпсод блока деления соединен с входом второго регистра памяти, выход которого соединен с входом фильтра, выход нуль-органа соединен с входом элемента задержки, выход которого соединен с входами обнуления счетчиков пути перемещения и пути торможения и с входом управления второго регистра памяти, выход нуль-органа соединен с управляизщим входом блока деления, вход делимого которого соединен с выходом счетчика ггути торможения, а вход делителя - с выходом первого регистра памяти, выход квадратора соединен с одним из входов блока умножения, выход которого соединен с первым входом эле$ 12585386
мента сравнения, выход которого сое-входом нуль-органа, выход блока вводинеН с управля|сщ1ти входами систе-да информации /соединен с вторым вхомы управления приводом транспорта-дом элемента сравнения и вторшм вхорукщёго механизМ||, счетчика путидом фильтра, выход которого соединен
торможения и первого регистра памяти,5 с вторым-входом блока умножения, выинформационный вход которого соеди-ход ключа соединен с счетным входом
нен с выходом квадратора, вход кото-счетчика пути перемещения, выход корого соединен с выходом датчика ско-торого соединен с третьим входом элерости транспортирующего механизма илента сравнения

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
| Способ управления скоростным режимом при реверсивной прокатке и устройство для его осуществления | 1989 |
|
SU1632538A1 |
| Устройство для управления скоростными режимами перемоточного станка | 1984 |
|
SU1236037A1 |
| Устройство для торможения реверсивного стана холодной прокатки | 1977 |
|
SU929260A1 |
| Устройство для деления | 1981 |
|
SU987621A1 |
| Устройство для управления режимами работы перемоточных станков | 1984 |
|
SU1227584A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ СНОВАЛЬНЫХ ВАЛОВ | 2012 |
|
RU2499758C1 |
| Устройство для управления весовым порционным дозатором | 1991 |
|
SU1830518A1 |
| Устройство телединамометрирования глубинно-насосных установок | 1990 |
|
SU1767225A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
Изобретение относится к устройствам управления безупорным остановом перемещающихся заготовок и может использоваться для управления остановом проката при его порезе на ножницах. Цель изобретения - увеличение производительности за счет повышения точности останова заготовки. Устройство содержит датчик 1 путевых импульсов, выход которого соеди нен с входом ключа, управляющий вход которого соединен с выходом датчика 3 наличия заготовки, выход ключа 2 со счетным входом счетчика 4, выход которого соединен с одним из входов элемента 5 сравнения, выход которого соединен с входом системы 6 управления приводом транспортирукяцего механизма, выход клнзча 2 соединен с счетным входом счетчика 7, выход которого соединен с входом делимого блока 8 деления, выход которого соединен с входом регистра 9 памяти, выход которого соединен с первым входом фильтра 10, входы обнуления счетчиков 4 и 7 и управляющий вход регистра 9 соединены с выходом элемента 11 задержки, вход делителя блока 8 деления соединен с выходом регистра 12 памяти, управляющий вход которого и управляющий вход счетчика 7 соединены . с выходом элемента 5 сравнения, управляющий вход блока 8 деления и вход элемента 11 задержки соединены (Л с to СП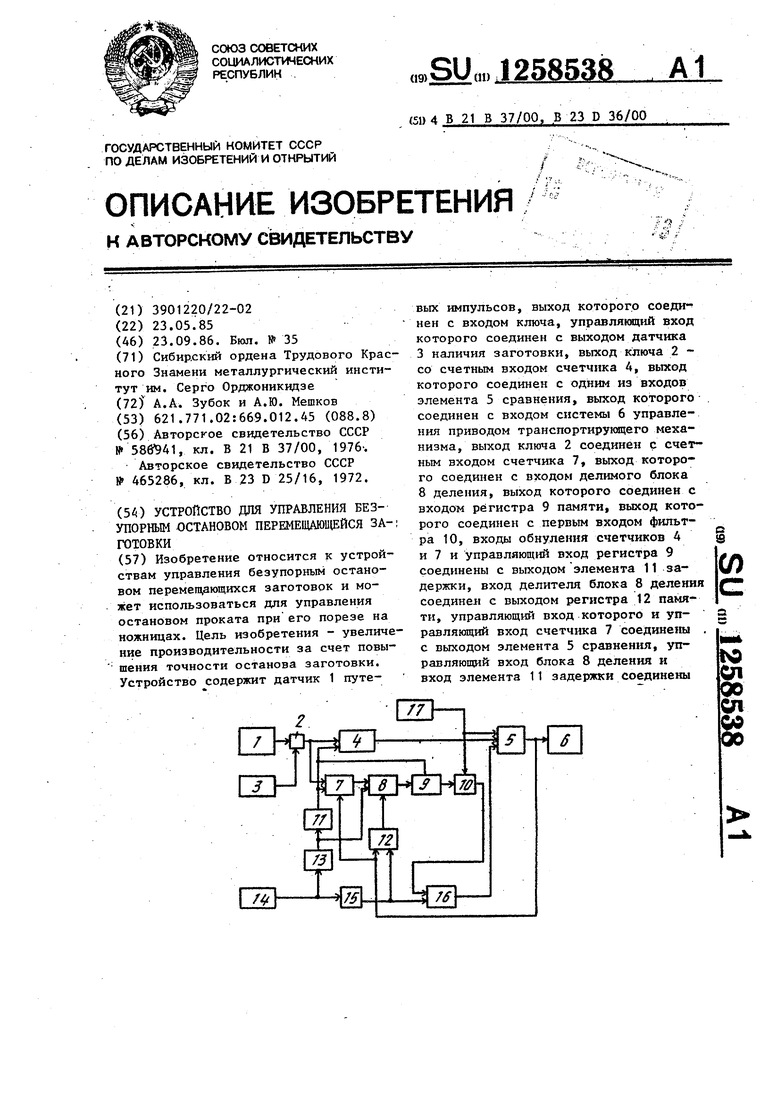

| Авторское свидетельство СССР № , кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Устройство для безупорочной резки проката на мерные длины ножницами | 1972 |
|
SU465286A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
