(Л
N3
О
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Устройство для коррекции дисбаланса | 1985 |
|
SU1305543A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
Изобретение относится к балансировочной те.хнике. Цель изобретения - новы- шение производительности за счет оптимального выбора осей коррекции, что приводит к увеличению количества годных для коррекции роторов. Регистратор 28 значения дисбаланса, соединенный с вы.ходом схемы 1 фильтрации, оценивает необходимость коррекции. Регистраторы 32 и 33 составляющих дисбаланса определяют величины масс, устанавливаемых по осям коррекции. Контроль нахождения осей коррекции напротив корректирующей позиции определяется регистраторами 26 и 27 фазы. 5 ил.
Фиг. 1
J
Изобретение относится к балансировочной технике и может быть использовано в балансировочных станках, станках-автоматах и автоматических линиях при балансировке роторов с симметрично расноло- женными относительно центра враш,ения местами, разрешенными для коррекции.
Цель изобретения - повышение нроиз- водительности за счет оптимального выбора осей коррекции, что приводит к увеличению количества годных для коррекции роторов.
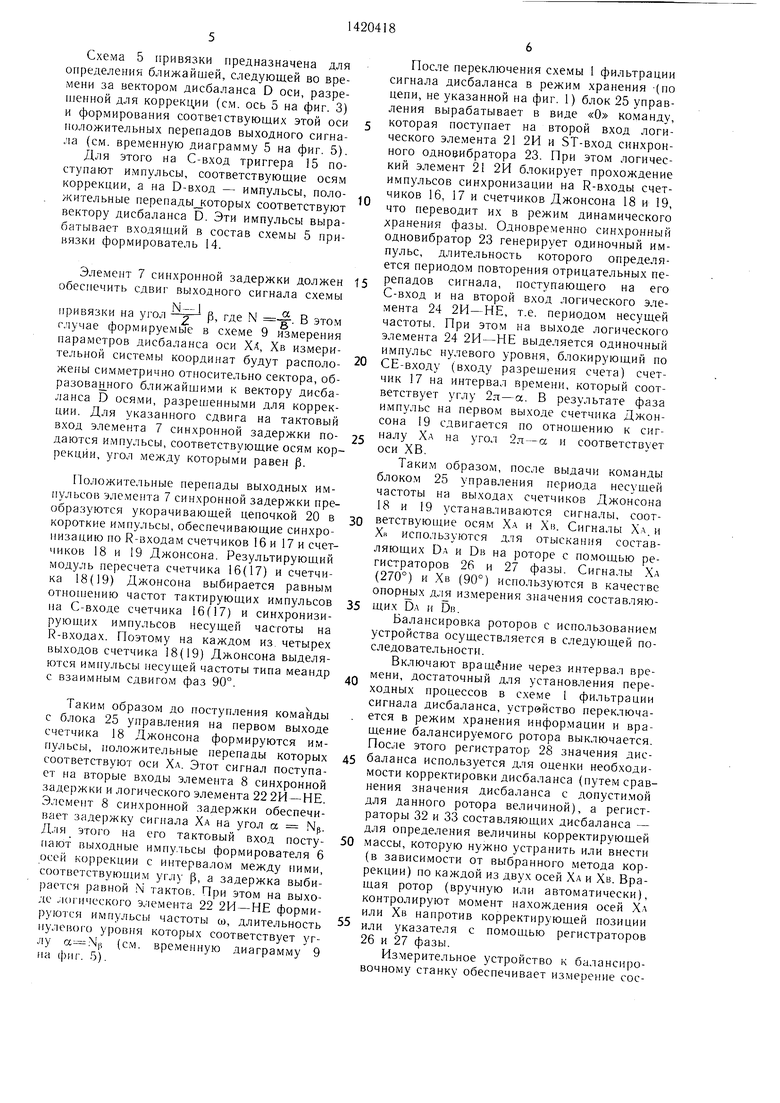
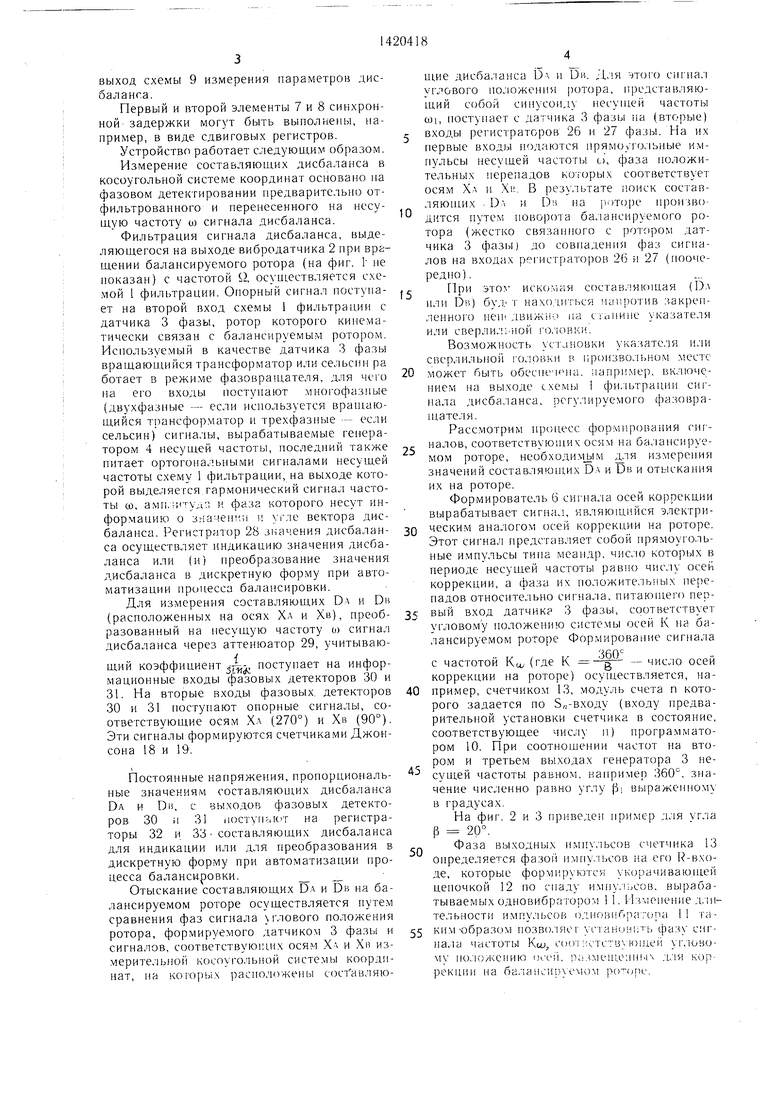
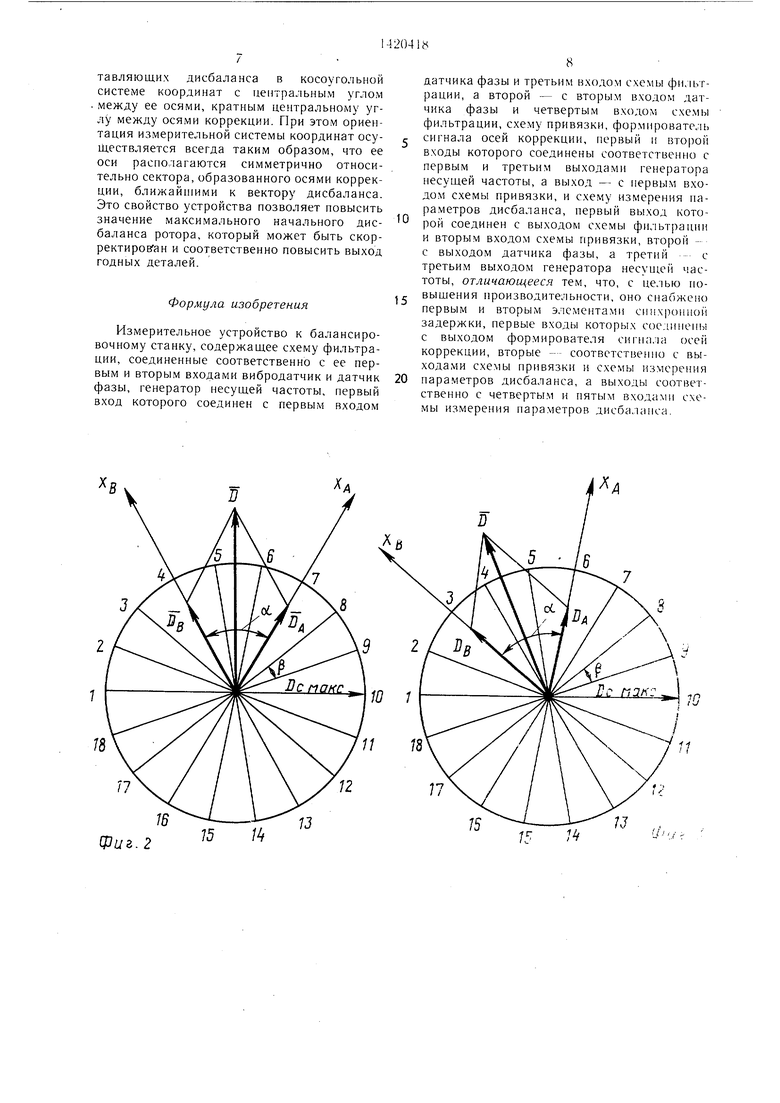
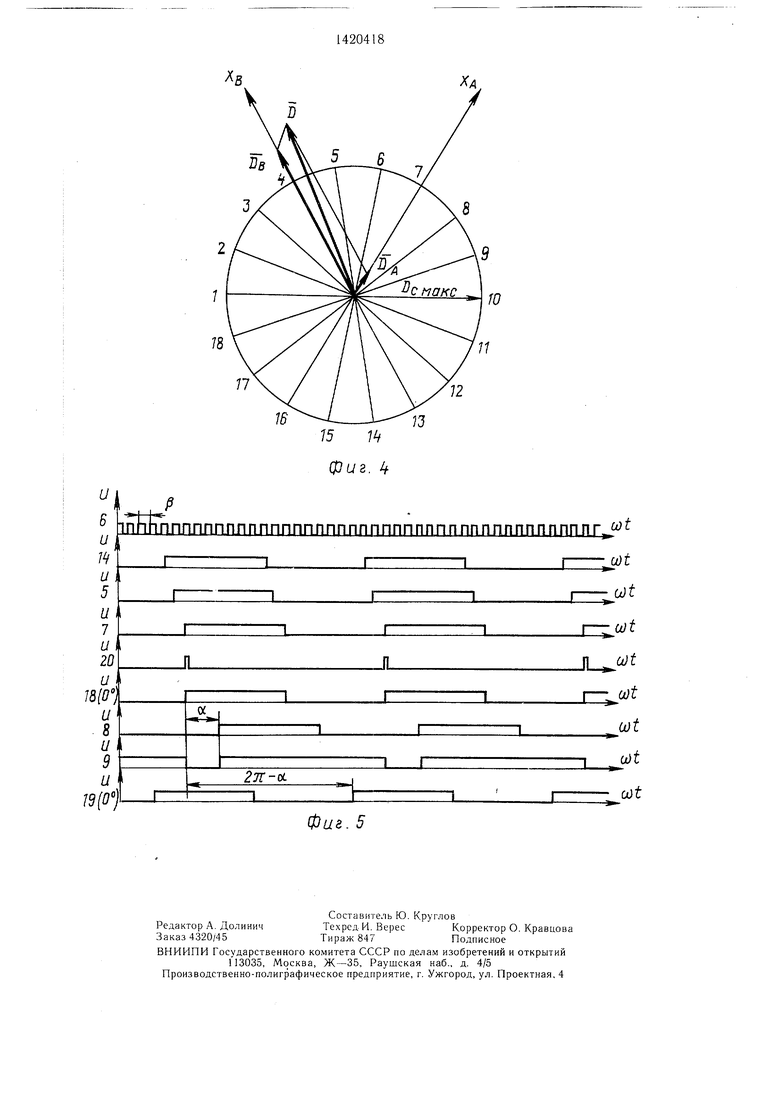
: На фиг. 1 представлена структурная схема измерительного устройства к балансировочному станку; на фиг. 2, 3 - векторные диаграммы; где Омакс обозначено максимальное значение составляющей дисба- л анса; D - вектор начального дисбаланса; DA и Ъп - составляющие дисбаланса; ХА и Хв - оси измерительной косоугольной системы координат; 1---18 -- номера осей коррекции; а - центральный угол Между осями Хд и Хв измерительной косоугольной системы координат; р - центральный угол между ближайшими осями коррекции; на фиг. 4 - временные диаграммы, числа, стоящие у начала каждой из Осей ординат, указывают номер элемента структурной схемы на фиг. 1, осям векторной диаграммы на фиг. 3 соответствуют положительные перепады импульсов на временных диаграммах фиг. 4 (при вращении плоскости, в которой, расположена век- Торная диаграмма против часовой стрелки с круговой частотой со).
Измерительное устройство к балансировочному станку содержит схему 1 фильтрации, соединенные соответственно с ее первым и вторым входами вибродатчик 2 и датчик 3 фазы, генератор 4 несущей частоты, первый выход которого соединен с первым входом датчика 3 фазы и третьим входом Схемы I фи;1ьтрации, а второй - с вторым входом датчика 3 фазы и четвертым входом схемы 1 фильтрации, схему 5 привязки, формирователь 6 сигнала осей коррекции, первый и второй входы которого соединены соответственно с первым и третьим выходами генератора 4 несущей частоты, первый и Еггорой элементы 7 и 8 синхронной задержки, первые входы которых соединены с выходом формирователя 6 сигнала осей коррекции и первым входом схемы 5 привязки, выход которой соединен со вторым входом перво1 о элемента 7 синхронной задержки, и схему 9 измерения параметров дисбаланса, первый, второй, третий, четвертый и пятый входы которой соединены соответственно с выходом схемы I фильтрации сш нала дисбаланса и вторы.м входом. схемы 5 привязки, 1 выходом датчика 3 фазы, третьим выходом генератора 4 несущей частоты и выходами соответственно первого и второго элементов 7 и 8 синхронной за0
5
0
5
0
5
0
5
0
55
держки, а выход - со вторым входом второго элемента 8 синхронной задержки. Формирователь 6 сигнала осей коррекции выполнен в виде программатора 10, последовательно соединенных одновибратора 11, вход которого представляет собой первый вход формирователя 6 сигнала осей коррекции, укорачивающей цепочки 12 и сое- дине|щого R-входом счетчика 13, Sn-вход которого соединен с нрограмматором 10, а С-вход и выход представляют собой соответственно второй вход и выход формирователя 6 сигнала осей коррекции.
Схема 5 привязки выполнена в виде формирователя 14 и соединенного с ним D-BXO- дом триггера 15, вход формирователя 14, С-вход и выход триггера 15 представляет собой соответственно второй и первый входы и выход схемы 5 привязки.
Схема 9 измерения параметров дисбаланса выполнена в виде первого и второго счетчиков 16 и 17 первого и второго счетчиков 18 и 19 Джонсона, С-входы которых соединены соответственно с выходами первого и второго счетчиков 16 и 17, последовательно соединенных укорачивающей цепочки 20 и логического элемента 21, 2И, выход которого соединен с R-входами счетчиков 16 и 17 и счетчиков Джонсона 18 и 19, последовательно соединенных первого логического элемента 22 2И-ИЕ, первый вход которого соединен с первым выходом первого счетчика Джонсона 18, синхронного одно- вибратора 23 и второго логического элемента 24 2И-НЕ, второй вход которого соединен с выходом первого логического элемента 22 2И-НЕ, а выход - с СЕ-входом второго счетчика 17, блока 25 управления, соединенного со вторым входом логического элемента 21 2И и ST-входом синхронного одновибратора 23, двух регистраторов фазы 26 и 27, подключенных первыми входами к первым выходам соответствующих счетчиков Джонсона 18 и 19, регистратора 28 значения дисбаланса, аттенюатора 29, двух фазовых детекторов 30 и 31, первые входы которых соединены с выходом аттенюатора 29, а вторые входы - соответственно с вторыми выходами второго и первого счетчиков 18 и 19 Джонсона и соединенных с выходами фазовых детекторов 30 и 31 двух регистраторов 32 и 33 составляющих дисбаланса, соединенные между собой входы регистратора 28 значения дисбаланса и аттенюатора 29 представляют собой первый вход схемы 9 измерения параметров дисбаланса, соединенные между собой вторые входы регистраторов 26 и 27 фазы - второй вход, соединенные между собой С-Бходы счетчиков 16 и 17 - третий вход, вход укорачиваюи1ей цепочки 20 - четвертый вход, второй вход первого логического элемента 22 2И-НЕ - пятый вход, а первый выход первого счетчика Джонсона 18 -
Схема 5 привязки предназначена для определения ближайшей, следующей во времени за вектором дисбаланса D оси, разрешенной для коррекции (см. ось 5 на фиг. 3) и формирования соответствующих этой оси положительных перепадов выходного сигнала (см. временную диаграмму 5 на фиг. 5).
Для этого на С-вход триггера 15 поступают импульсы, соответствующие осям коррекции, а на D-вход - импульсы, поло- жительные перепады которых соответствуют вектору дисбаланса D. Эти импульсы вырабатывает входящий в состав схемы 5 привязки формирователь 14.
Элемент 7 синхронной задержки должен обеспечить сдвиг выходного сигнала схемы
привязки на угол --ч- р, где N -. В этом случае формируемые в схеме 9 измерения параметров дисбаланса оси ХД, Хв измерительной системы координат будут располо- жены симметрично относительно сектора, об- разован ного ближайшими к вектору дисбаланса D осями, разрешенными для коррекции. Для указанного сдвига на тактовый вход элемента 7 синхронной задержки по- даются импульсы, соответствующие осям коррекции, угол между которыми равен р.
Положительные перепады выходных импульсов элемента 7 синхронной задержки преобразуются укорачивающей цепочкой 20 в короткие импульсы, обеспечивающие синхронизацию по R-входам счетчиков 16 и 17 и счетчиков 18 и 19 Джонсона. Результирующий модуль пересчета счетчика 16(17) и счетчика 18(19) Джонсона выбирается равным oтнoпJeнию частот тактирующих импульсов па С-входе счетчика 16(17) и синхронизирующих импульсов несущей частоты на R-входах. Поэтому на каждом из. четырех выходов счетчика 18(19) Джонсона выделяются имнульсы несущей частоты типа меандр с взаимным сдвигом фаз 90°.
Таким образом до поступления команды с блока 25 управления на первом выходе счетчика 18 Джонсона формируются импульсы, положительные перепады которых соответствуют оси Хл. Этот сигнал поступает на вторые входы элемента 8 синхронной задержки и логического элемента 22 2И-НЕ. Элемент 8 синхронной задержки обеспечивает задержку сигнала ХА на угол а Np. Для этого на его тактовый вход посту- пают выходные импульсы формирователя 6 осей коррекции с интервалом между ними, соответствуюпшм угл)- |3, а задержка выбирается равной N тактов. При этом на выходе .:К)гического элемента 22 2И-НЕ формируются импульсы частоты ы, длительность пулевого уровня которых соответствует углу а-. р (см. временную диаграмму 9 па фпг. 5).
После переключения схемы 1 фильтрации сигнала дисбаланса в режим хранения -(по цепи, не указанной па фиг. 1) блок 25 управления вырабатывает в виде «О команду, которая поступает на второй вход логического элемента 21 2И и ST-вход синхронного одновибратора 23. При этом логический элемент 21 2И блокирует прохождение импульсов синхронизации па R-входы счетчиков 16, 17 и счетчиков Джонсона 18 и 19, что переводит их в режим динамического хранения фазы. Одновременно синхронный одновибратор 23 генерирует одиночный импульс, длительность которого определяется периодом повторения отрицательных перепадов сигнала, поступающего па его С-БХОд и на второй вход логического элемента 24 2И-НЕ, т.е. периодом несущей частоты. При этом на выходе логического элемента 24 2И-НЕ выделяется одиночный импульс нулевого уровня, блокирующий по СЕ-входу (входу разрещения счета) счетчик 17 на интервал времени, который соответствует углу 2л-ос. В результате фаза импульс на перво.м выходе счетчика Джонсона 19 сдвигается по отношению к сигналу Х.- на угол 2л-а и соответствует оси ХВ.
Таки.м образом, после выдачи команды блоком 25 управления периода несущей частоты на выходах счетчиков Джонсона 18 и 19 устанавливаются сигналы, соот- ветствуюил.ие осям Х.- и Хи. Сигналы Хл, и .Хй используются для отыскания составляющих DA и DB на роторе с помощью регистраторов 26 и 27 фазы. Сигналы Хл (270°) и Хв (90°) используются в качестве опорн ых д«ш измерения значения составляющих О.л и DB.
Балансировка роторов с использование.м устройства осуществляется в следующей последовательности.
Включают вращение через интервал времени, достаточный для установления переходных процессов в схеме 1 фильтрации сигнала дисбаланса, устрвйство переключается в режим хранения информации и вращение балансируемого ротора выключается. После этого регистратор 28 значения дисбаланса используется для оценки необходимости корректировки дисбаланса (путем сравнения значения дисбаланса с допустимой для данного ротора величиной), а регистраторы 32 и 33 составляющих дисбаланса - для определения величины корректирующей .массы, которую нужно устранить или внести (в зависимости от выбранного метода коррекции) по каждой из двух осей ХА и Хв. Вращая ротор (вручную или автоматически), контролируют момент нахождения осей Хл или Хв напротив корректирующей позиции или указателя с помощью регистраторов 26 и 27 фазы.
Измерительное устройство к балансировочному станку обеспечивает измерение сое
выход схемы 9 измерения параметров дис- балаиг.а.
Первый и второй элементы 7 и 8 синхронной задержки могут быть вынолнены, например, в виде сдвиговых регистров.
Устройство работает следующим образом.
Измерение составляющих дисбаланса в косоугольной системе координат основано на фазовом детектировании нредваритсльно отфильтрованного и неренесенного на несущую частоту OJ сигнала дисбаланса.
Фильтрация сигнала дисбаланса, выделяющегося на выходе вибродатчика 2 при вращении балансируемого ротора (на фиг. 1 не показан) с частотой Q, осун|,ествляется схемой I фильтрации. Опорный сигнал ноступа- ет на второй вход схемы 1 фильтрации с датчика 3 фазы, ротор которого кинематически связан с балансируемым ротором. Используемый в качестве датчика 3 фазы вращающийся трансформатор или сельсин ра ботает в режиме фазовращателя, для чего на его входы поступают многофазные (двухфазные - если используется вращающийся трансформатор и трехфазные - если сельсин) сигналы, вырабатываемые генератором 4 несущей частоты, последний также питает ортогональными сигналами несущей частоты схему 1 фильтрации, на выходе которой выделяется гармонический сигнал частоты со, амп.;ртуд: и фаза которого несут информацию о з.чачеп ,; и гле вектора дисбаланса. Регистратор 28 значения дисбалан- са осуществляет индикацию значения дисбаланса или (и) преобразование значения дисбаланса в дискретную форму при автоматизации пропесса балансировки.
Для измерения составляющих Од и DB (расположенных на осях Хл и Хи), преоб- разованный на несущую частоту w сигнал дисбаланса через аттенюатор 29, учитывающий коэффициент ji постунает на информационные входы фазовых детекторов 30 и 31. На вторые входы фазовых, детекторов 30 и 31 юстунают опорные сигналы, соответствующие осям Х. (270°) и Хв (90°). Эти сигналы формируются счетчиками Джонсона 18 и 19.
Постоянные напряжения, пропорциопаль- ные значениям составляющих дисбаланса DA и DH, с выходов фазовых детекторов 30 и 31 ностугилот на регистраторы 32 и 33 составляющих дисбаланса для индикации или для преобразования в дискретную форму при автоматизации процесса балансировки.
Отыскание составляющих DA и DB на балансируемом роторе осуществляется путем сравнения фаз сигнала глового положения ротора, формируемого датчиком 3 фазы и сигналов, соответствующих осям Х и Хн измерительной косоуго.аьной системы координат, на когорых расноложещ составляю0
0 5 О
5 0
,.
5
щие дисбаланса Ь . п Он. Д.ля этого сигна.ч углового положения )отора, представляющий собой синусоиду несуп1ей частоты Ы1, поступает с датчика 3 фазы па (вторые) входы регистраторов 26 и 27 фазы. На их первые вход)з1 подаются прямоугольные импульсы несущей частоты о, фаза положительных перепадов которьгх соответствует осям Хл п .Хи. В результате j-юиск составляющих 1)л и Dii на |if)TO|)e нроичво- днтся путем поворота балансируемого ротора (жестко связанного с ротором датчика 3 фазьг) до совпадения фаз сигналов на входах регистраторов 26 и 27 (поочередно).
При этоу искомая составляющая (1)л пли Di -) бул. т нахоличч ся unipOTnB закрепленного пеп . движи( на сгчпипе указателя или сверли.: 1 НОЙ головки.
Возможность установки указателя пли сверлильпой головки в произвольном месте может быть обеспеч м1а, например, включе,- пнем на выходе схемы 1 фи.1ьтрацпп сигнала дисбаланса, рег} лируемого фазовращателя.
Рассмотрим процесс формпрова тя сиг-налов, соответствуюп1ик осям на 6a;iaiicnpye- мом роторе, необходи.хшм д.1Я измерения значений составляющих DA и DB и отыскания их на роторе.
Формирователь 6 сигнала осей коррекции вырабатывает сигнал, являющийся электрическим аналогом осей коррекции па роторе. Этот си1 нал нредставляет собой прямоуго.пь- ные импульсы тина меандр, число которых в периоде несущей частоты равно числу осей коррекции, а фаза их положительных перепадов относите,:1ьпо сигнала, питаюп1его первый вход датчика 3 фазы, соответствует угловому положению системы осей К на балансируемом роторе Формирование сигнала
с частотой Кц/ (где К - число осей коррекции па роторе) осуществляется, например, счетчиком 13, модуль счета п которого задается по 5„-входу (входу предварительной установки счетчика в состояние, соответствующее числу п) программатором 10. При соотношении частот на втором и третьем выходах генератора 3 не- супхей частоты равпом, например 360°, значение числепно равно углу pi выраженному в градусах.
На фиг. 2 и 3 приведен пример для угла Р 20°.
Фаза выходных импульсов счетчика 13 определяется фазой импульсов н.а его R-BXO- де, которые формируются /К(рачиваю,1цей цепочкой 12 по спаду и,1пу.1ьсов, вырабатываемых одновибратором 1 . Изменение длительности импульсов u.THoriiiopaTona 1 1 таким-образом Г1ОЗВОЛЯС1- ч-ганон1:ть фазу сигнала частоты KcOj cool :-:етст1з уг. юно- му по.ю/кению oceii. р;,(меще;1П1.| .чл.я K(jp- peKiuin на ба.ланснслччюм ,.
тавляющих дисбаланса в косоугольной системе координат с центральным углом между ее осями, кратным центральному углу между осями коррекции. При этом ориентация измерительной системы координат осуществляется всегда таким образом, что ее оси раснолагаются симметрично относительно сектора, образованного осями коррекции, ближайшими к вектору дисбаланса. Это свойство устройства позволяет новысить значение максимального начального дисбаланса ротора, который может быть скор- ректировган и соответственно повысить выход годных деталей.
Формула изобретения
Измерительное устройство к балансировочному станку, содержащее схему фильтрации, соединенные соответственно с ее первым и вторым входами вибродатчик и датчик фазы, генератор несущей частоты, первый вход которого соединен с первым входом
В
/7
16
Фиг.2
0
0
датчика фазы и третьим входом схемы фильтрации, а второй - с вторым входом датчика фазы и четвертым входом схемы фильтрации, схему привязки, формирователь сигнала осей коррекции, первый и второй входы которого соединены соответственно с первым и третьим выходами генератора несущей частоты, а выход - с первым входом схемы привязки, и схему измерения параметров дисбаланса, первый выход которой соединен с выходом схемы фильтрации и вторым входом схемы привязки, второй - с выходом датчика фазы, а третий с третьим выходом генератора несущей частоты, отличающееся тем, что, с целью повышения производительности, оно снабжено первым и вторым элементами синхронной задержки, первые входы которых сс)елипеп 1 с выходом формирователя сигнала осей коррекции, вторые -- соответственно с выходами схемы привязки и схемы измерения пара.метров дисбаланса, а выходы соответственно с четвертым и пятым входами схемы измерения параметров дисбаланса.
и
6
и
/
и 5
и
7
и
20
и 18(0
и
8
и
9
и
J3(0)
-t
1ппппптшпллппт1Лплппплпппппгшпппапш1Г1П гшш1Г.
Фиг. 5
11
12
cot
Wt (j)t
oot
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
