Изобретение относится к автоматическому управлению и может быть использовано для чиглового программно- ного управления координатными перемещениями,
Цель изобретения - повышение точности устройства при управлении координатными перемещениями во времени.
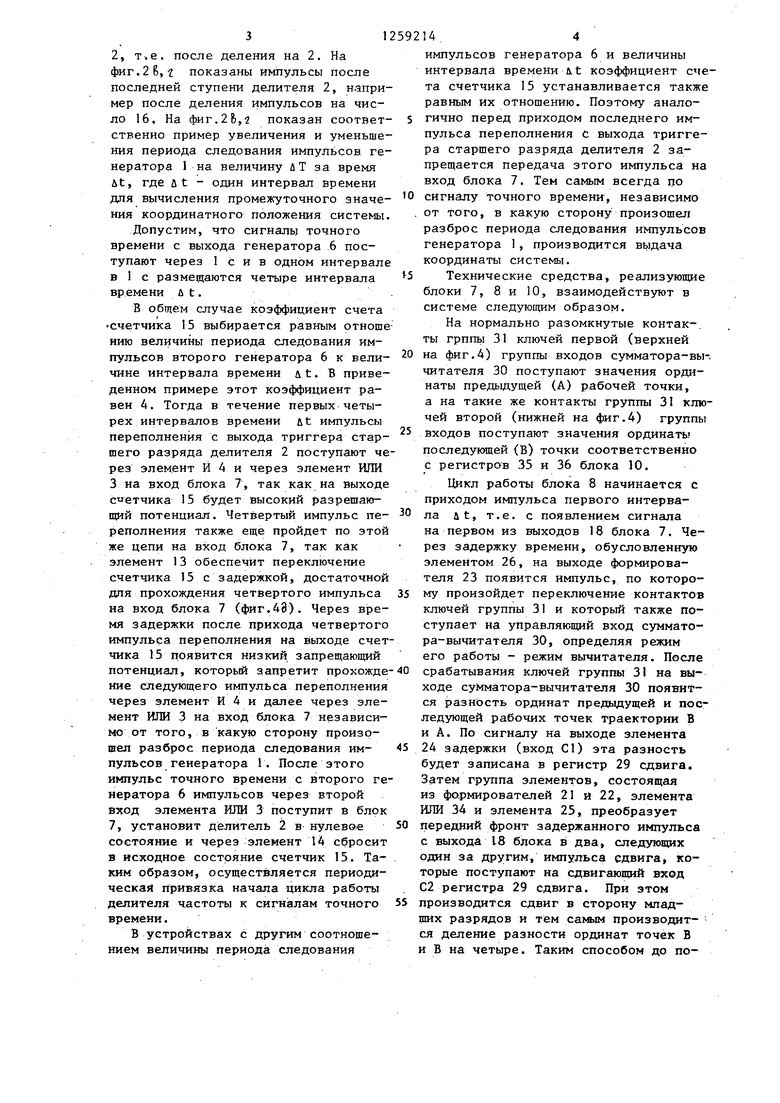
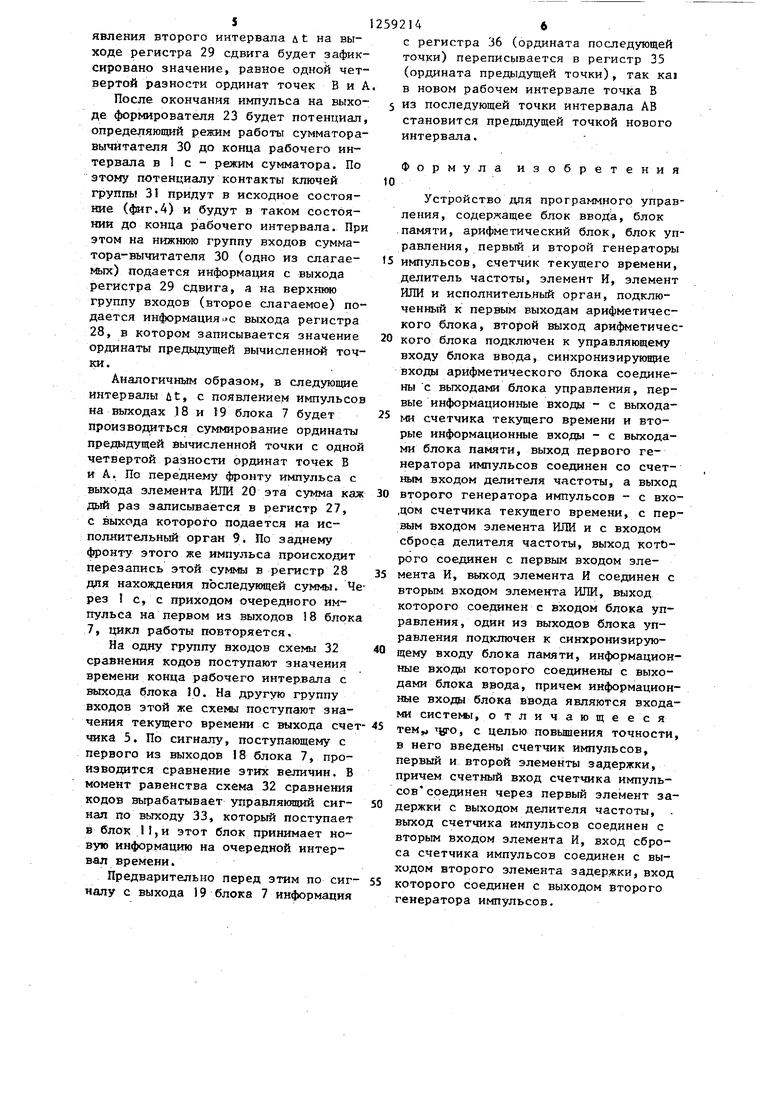
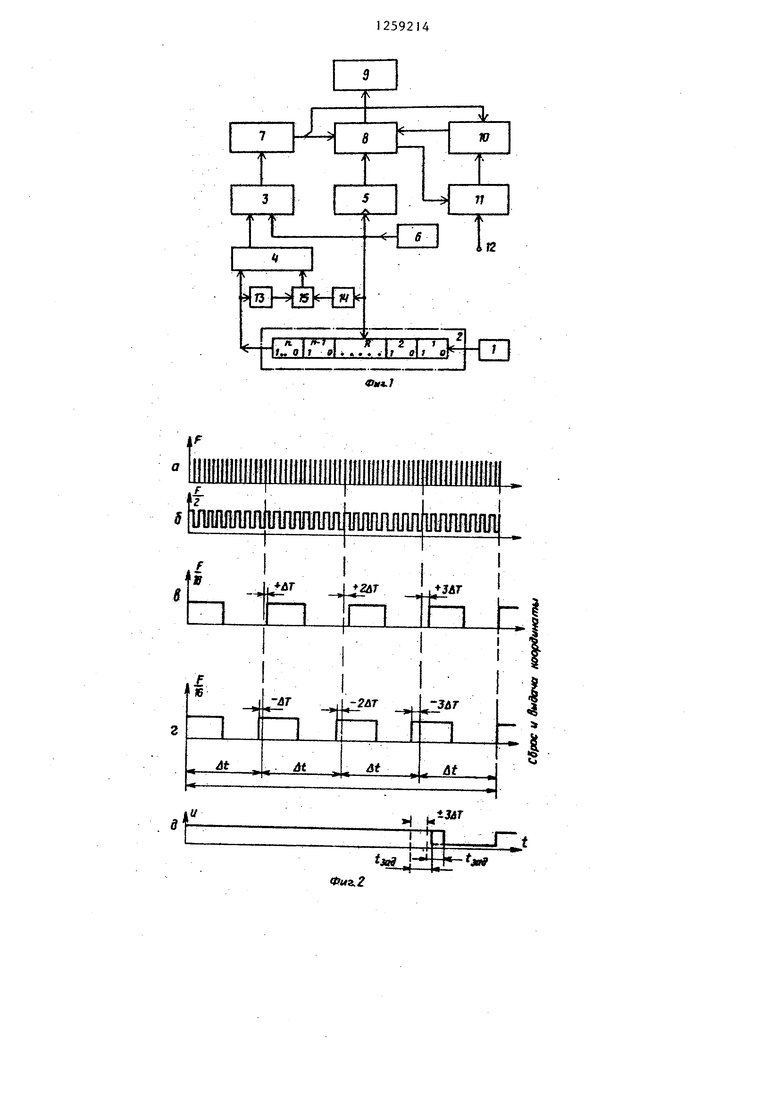
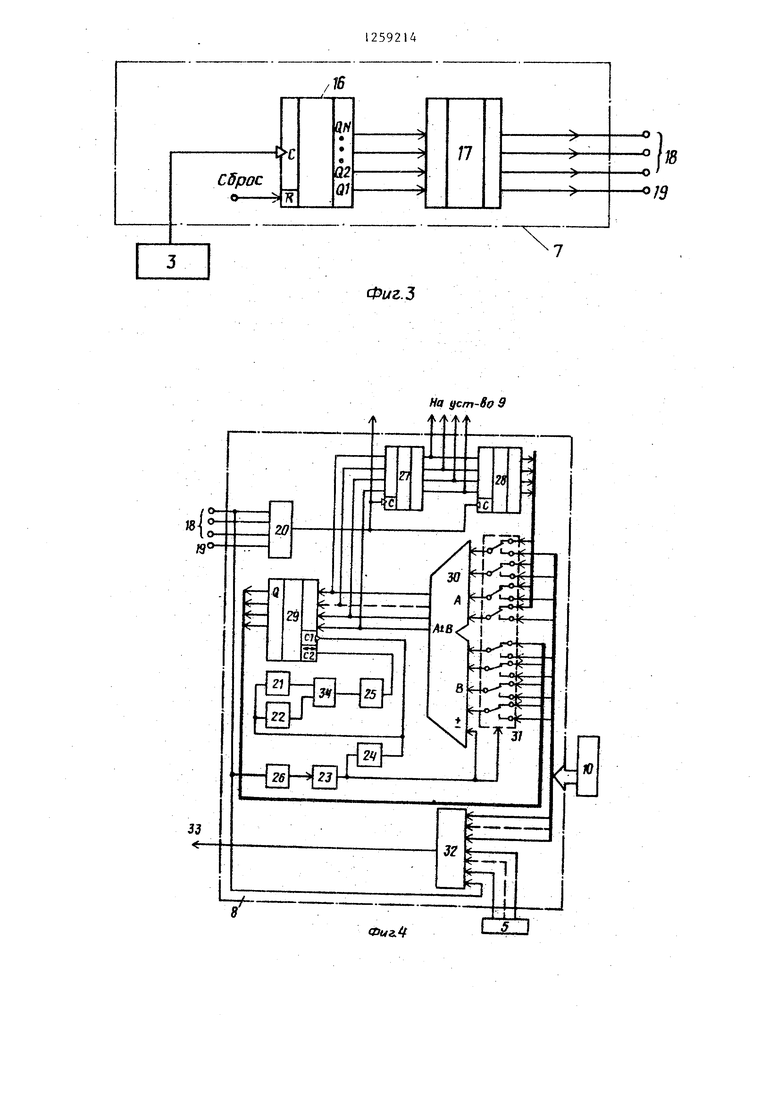
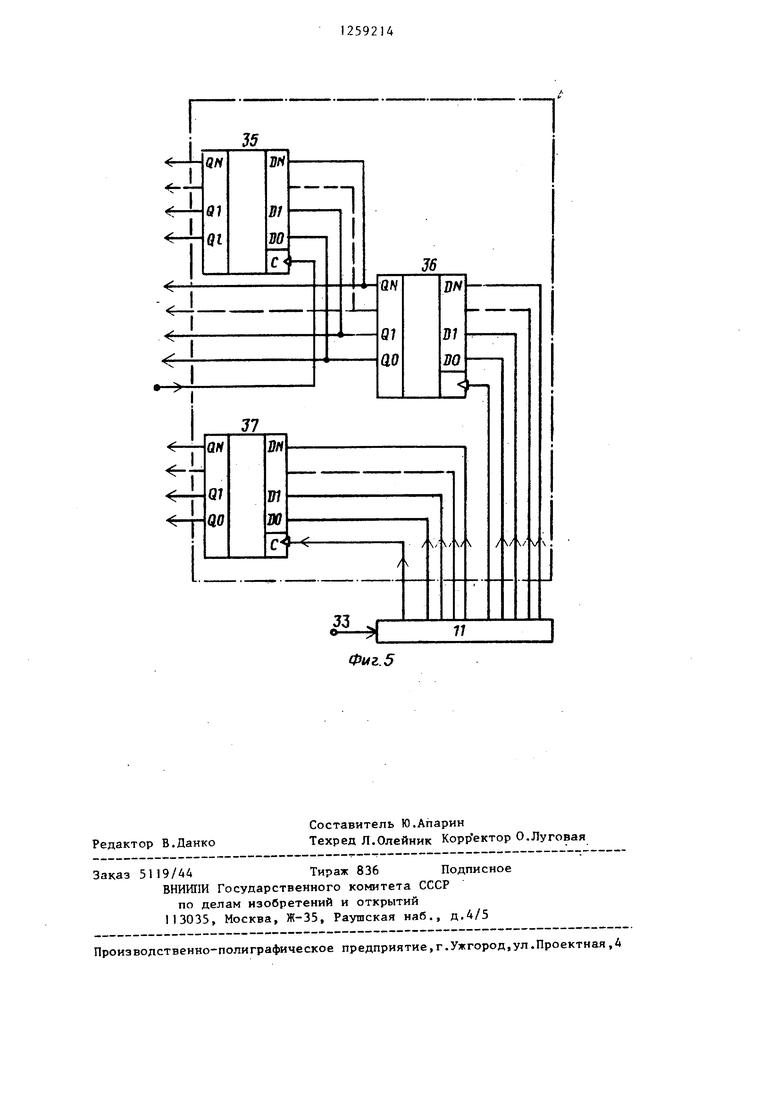
На фиг.1 приведена схема устрой- ства; на фиг.2 - временные диаграммы сигналов в схеме устройства; на фиг.З - функциональная схема блока управления; на фиг.4 - функциональная схема арифметического блока; на фиг.З - схема блока памяти.
Устройство для программного управления содержит первый генератор 1 импульсов, делитель 2 частоты, элементы ИЛИ 3, И 4, счетчик 5 текущего времени, второй генератор 6 импульсов, блок 7 управления, арифметический блок 8, исполнительный орган 9, блок 10 памяти, устройство 1 ввода, входы 12 системы, первый 13 и второй 14 элементы задержки и счетчик 15 импульсов. Блок 7 управления (фиг.З) состоит из двоичного счетчика 16 и дешифратора J7 состояний, который вырабатывает на своих выходах 18 и 19 соответствующие сигналы управления блоком 8.
Арифметический блок 8 содержит элемент ИЛИ 20, формирователи 21-23; элементы 24-26 задержки, регистры 27 и 28, регистр 29 сдвига, сумма- Тор-вычитатель 30, группу 31 ключей, схему 32 сравнения кодов с выходом 33 и элемент ИЛИ 34.
Блок 10 содержит регистр 35 значения ординаты предыдущей рабочей точки, регистр 36 значения ординаты последующей рабочей точки и регистр 37 текущего времени.
Устройство работает следующим образом.
На входы 12 блока 11 от внешнего источника информации поступают кодьг, определяющие параметры траектории движения CHCTeNbi на данном интервале времени, а также код точного времени конца данного интервала. Эти кодгл запоминаются в регистре 10 и хранятся в нем в течение данного интервала времени.
С выхода генератора 1 на делитель 2, содержащий п разрядов и выполнен- Шй по схеме двоичного счетчика, по
5
0
5
5
0
5
5
0
ступают импульсы высокой частоты F. С выхода старшего Сп-го) разряда делителя 2 на счетный вход счетчика 5 через элемент 13 и на первый вход - элемента И 4 поступают импульсы с частотой Fj . Эти импульсы через элемент ИЛИ 3 поступают в блок 7, который использует их как сигналы для вычисления с помощью блока 8 очередного промежуточного значения координатного положения системы программного управления внутри заданного интервала времени.
При вычислении промежуточных значений координатных положений также определяются промежуточные значения времени подсчетом общего количества импульсов, поступивших в блок 7 с выхода элемента ИПИ 3 от начала данного рабочего интервала. Вычисленные значения координатных перемещений отрабатываются органом 9. Данные для расчета промежуточных значений координатных перемещений поступают в блок 10 через блок 11, который связан с входами 12 с внешним источником информации .
В блоке 8 по сигналам блока 7 производится сравнение текущего значения времени, вырабатываемого счетчиком 3, со значением времени конца рабочего интервала. При равенстве этих значений блок 8 выдает сигнал на управляющий вход блока 11, по которому он принимает новую информацию на очередной интервал времени.
Из-за разброса параметров первого генератора 1.период следования сигналов, поступающих с выхода элемента ИЛИ 3 на вход блока 7, имеет разброс относительно своего среднего значения Т Tfp ± Т. Это приводит к ошибке при подсчете общего количества импульсов, поступивших к данному моменту сзремени, и величина этой опгиб- ки зависит от того, в какую сторону от среднего значения происходит разброс периода следования импульсов генератора I. В устройстве накопленная между двумя коррекциями ошибка при одной и той же величине периода следования импульсов генератора 6 низкой частоты не зависит от того, в какую сторону происходит разброс периода следования импульсов генератора 1.
На фиг.2а показаны импульсы на выходе генератора 1, на фи1 .2& - импульсы после первой ступени делителя
-
312
2, т.е. после деления на 2. На фиг.26,г показаны импульсы после последней ступени делителя 2, например после деления импульсов на число 16, На фиг.2&, 2 показан соответ- ственно пример увеличения и уменьшения периода следования импульсов генератора 1 на величину и Т за время At, где At - один интервал времени для вычисления промежуточного значе ния координатного положения системы.
Допустим, что сигналы точного времени с выхода генератора 6 поступают через 1 с и в одном интервале в 1 с размещаются четыре интервала времени At.
В общем случае коэффициент счета счетчика 15 выбирается равным отношению величины периода следования импульсов второго генератора 6 к вели- чине интервала времени at. В приведенном примере этот коэффициент равен 4. Тогда в течение первых четырех интервалов времени ut импульсы переполнения с выхода триггера старшего разряда делителя 2 поступают через элемент И 4 и через элемент ИЛИ 3 на вход блока 7, так как на выходе сметчика 15 будет высокий разрешающий потенциал. Четвертый импульс пе- реполнения также еще пройдет по этой же цепи на вход блока 7, так как элемент 13 обеспечит переключение счетчика 15 с задержкой, достаточной дпя прохождения четвертого импульса на вход блока 7 (фиг.48). Через время задержки после прихода четвертого импульса переполнения на выходе счетчика 15 появится низкий запрещающий потенциал, который запретит прохожде ние следующего импульса переполнения через элемент И 4 и далее через элемент ИЛИ 3 на вход блока 7 независимо от того, в какую сторону произошел разброс периода следования им- пульсов генератора 1. После этого импульс точного времени с второго генератора 6 импульсов через второй вход элемента ИЛИ 3 поступит в блок 7, установит делитель 2 в нулевое состояние и через элемент 14 сбросит в исходное состояние счетчик 15. Таким образом, осуществляется периодическая привязка начала цикла работы делителя частоты к точного времени.
В устройствах с другим соотношением величины периода следования
to
25
592
5
35 404550 55
144
импульсов генератора 6 и величины интервала времени t коэффициент счета счетчика 15 устанавливается также равным их отношению. Поэтому аналогично перед приходом последнего импульса переполнения с выхода триггера старшего разряда делителя 2 запрещается передача этого импульса на вход блока 7. Тем самым всегда по сигналу точного времени, независимо от того, в какую сторону произошел разброс периода следования импульсов генератора 1, производится выдача координаты системы.
Технические средства, реализующие блоки 7, 8 и 10, взаимодействуют в системе следующим образом.
На нормально разомкнутые контак-. ты грппь 31 ключей первой (верхней на фиг.4) группы входов сумматора-вы- читателя 30 поступают значения ординаты предыдущей (А) рабочей точки, а на такие же контакты группы 31 ключей второй (нижней на фиг.4) группы входов поступают значения ординаты последующей (В) точки соответственно с регистров 35 и 36 блока 10.
Цикл работы блока 8 начинается с приходом импульса первого интервала at, т.е. с появлением сигнала на первом из выходов 18 блока 7. Через задержку времени, обусловленную элементом 26, на выходе формирователя 23 появится импульс, по которому произойдет переключение контактов ключей группы 31 и который также поступает на управляющий вход суммато- ра-вычитателя 30, определяя режим его работы - режим вычитателя. После срабатывания ключей группы 31 на выходе сумматора-вычитателя 30 появится разность ординат предьщущей и пос- яедующей рабочих точек траектории В и А. По сигналу на выходе элемента 24 задержки (вход С1) эта разность будет записана в регистр 29 сдвига. Затем группа элементов, состоящая из формирователей 21 и 22, элемента ИЛИ 34 и элемента 25, преобразует передний фронт задержанного импульса с выхода 18 блока в два, следующих один за другим, импульса сдвига, которые поступают на сдвигающий вход С2 регистра 29 сдвига. При этом производится сдвиг в сторону мпад- щих разрядов и тем производится деление разности ординат точек В и В на четыре. Таким способом до по
явления второго интервала д t на выходе регистра 29 сдвига будет зафиксировано значение, равное одной четвертой разности ординат точек В и А
После окончания импульса на выходе формирователя 23 будет потенциал, определяющий режим работы сумматора- вычитателя 30 до конца рабочего интервала в 1 с - режим сумматора. По этому потенциалу контакты ключей группы 31 придут в исходное состояние (фиг.4) и будут в таком состоянии до конца рабочего интервала. При этом на нижнюю группу входов сумма- тора-вычитателя 30 (одно из слагаемых) подается информация с выхода регистра 29 сдвига, а на верхнюю группу входов (второе слагаемое) подается информация С выхода регистра 28, в котором записывается значение ординаты предыдущей вычисленной точки.
Аналогичным образом, в следующие интервалы it, с появлением импульсов на выходах .18 и 19 блока 7 будет производиться суммирование ординаты предыдущей вычисленной точки с одной четвертой разности ординат точек В и А. По переднему фронту импульса с выхода элемента ИЛИ 20 эта сумма каж дый раз записывается в регистр 27, с выхода которого подается иа исполнительный орган 9. По заднему фронту этого же импульса происходит перезапись этой суммы в регистр 28 для нахождения последукицей суммы. Че рез с, с приходом очередного импульса на первом из выходов 18 блока 7, цикл работы повторяется.
На одну группу входов схемы 32 сравнения кодов поступают значения времени конца рабочего интервала с выхода блока 10. На другую группу входов этой же схемы поступают значения текущего времени с выхода счет чика 5. По сигналу, поступающему с первого из выходов 18 блока 7, производится сравнение этих величин. В момент равенства схема 32 сравнения кодов вырабатывает управлякнций сиг- нал по выходу 33, который поступает в блок И,и этот блок принимает новую информацию на очередной интервал времени.
Предварительно перед этим по сиг- налу с выхода 19 блока 7 информация
с регистра 36 (ордината последующей точки) переписывается в регистр 35 (ордината предыдущей точки), так Kai в новом рабочем интервале точка В 5 из последующей точки интервала АВ становится предыдущей точкой нового интервала.
Формула изобретения
5
5 0
5
0
Устройство для программного управления, содержащее блок ввода, блок памяти, арифметический блок, блок управления, первый и второй генераторы
5 импульсов, счетчик текущего времени, делитель частоты, элемент И, элемент ИЛИ и исполнительный орган, подключенный к первым выходам арифметического блока, второй выход арифметичес0 кого блока подключен к управляющему входу блока ввода, синхронизирующие входы арифметического блока соединены с выходами блока управления, первые информационные входы - с выхода- г-ш счетчика текущего времени и вторые информационные ахода.1 - с выходами блока памяти, выход первого генератора импульсов соединен со счет- входом делителя частоты, а выход второго генератора импульсов - с входом счетчика текущего времени, с первым входом элемента ИЛИ и с входом сброса делителя частоты, выход котЬ- рюго соединен с первым входом элемента И, выход элемента И соединен с вторым входом элемента ИЛИ, выход которого соединен с входом блока управления , один из выходов блока управления подключен к синхронизирующему входу блока памяти, информационные входь которого соединены с выходами блока ввода, причем информационные входы блока ввода являются входами системы, о тличающе ее я тем,, «го, с целью повышения точности, в него введены счетчик импульсов, первьой и второй элементы задержки, причем счетный вход счетчика импульсов соединен через первый элемент задержки с выходом делителя частоты, выход счетчика импульсов соединен с вторым входом элемента И, вход сброса счетчика импульсов соединен с выходом второго элемента задержки, вход которого соединен с выходом второго генератора импульсов.
5
0
л н-1 I Л I г Г г 1
1„ в. ... .1 0
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU429417A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2446454C1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2446461C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
| Устройство для определения взаимной корреляционной функции | 1986 |
|
SU1406602A1 |
| Способ измерения мгновенных значений частоты электрического сигнала и устройство для его осуществления | 1987 |
|
SU1503022A1 |
| СПОСОБ ДИСКРЕТНОГО КОНТРОЛЯ РАССТОЯНИЙ ДО ИСТОЧНИКА КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2028579C1 |
| Цифровой генератор | 1986 |
|
SU1347164A1 |
| Система для передачи телеизмерительной информации | 1981 |
|
SU1037313A1 |
| Цифровой функциональный преобразователь | 1980 |
|
SU942034A1 |
Изобретение относится к автоматическому управлению и может быть использовано для числового программного управления координатньми перемещениями. Решается задача повышения точности управления координатными перемещениями во времени за счет исключения ошибки между двумя коррекциями, вызванной разбросом периода следования генератора импульсов интерполяции. Входная информация устройства (параметры траектории и код точного времени) поступает через блок ввода на регистр. Импульсы первого генератора импульсов через делитель частоты, элементы И, ИЛИ подаются в блок управления, который использует их как сигналь дпя вычисления с помощью арифметического блока очередного промежуточного значения координатного положения системы внутри заданного интервала времени. Вычисленные значения обрабатываются исполнительным органом. При равенстве текущего времени, задаваемого вторым генератором импульсов и счетчиком текущего времени и заданного времени конца интервала арифметическое устройство подает сигнал на блок ввода для приема новой информации. Элементы задержки и счетчик импульсов осущест- вляют периодическую привязку начала цикла работы делителя частоты к сигналам точного времени таким образом, что последний импульс переполнения делителя частоты на каждом интервале не подается на вход блока управления . 5 ил.
-4-
+JAr
К-йТ
At
ut
-2&Г
ЗАГ
At
At
5
4i
«
W
2Э
1 C2
гг
22
LT
W
23
JJ Фиг.З
Ha scm-8o 9
Tl
П
w к
U 4
MB
Д
8
fi
J/
IJ
32
, &
«:±Редактор В.Данко
Составитель Ю.Апарин
Техред Л.Олейник Корр ектор О.Луговая
Заказ 5119/44Тираж 836 Подписное
ВНИЖ1И Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская иаб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
Фиг. 5
| Функциональный преобразователь | 1976 |
|
SU607235A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ | 1972 |
|
SU429417A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ПРИБОР ДЛЯ ЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ ЗВУКОВ | 1923 |
|
SU1974A1 |
