1 1
Изобретение относится к области автоматического регулирования, может быть применено для точного воспроизведения вибраций, задаваемых генератором, на Бибростенде и является дополнительным к авт.св. № 1117588.
Цель изобретения - повышение точности регулирования путем коррекции формы колебаний вибростенда на высоких частотах.
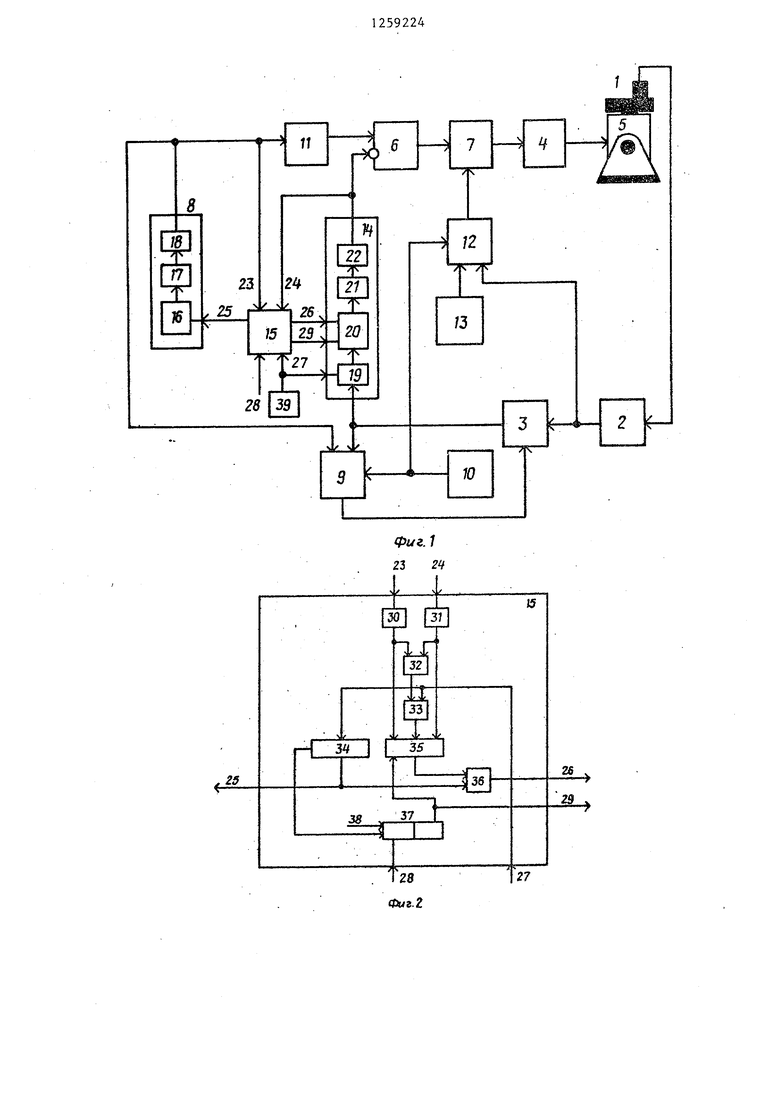
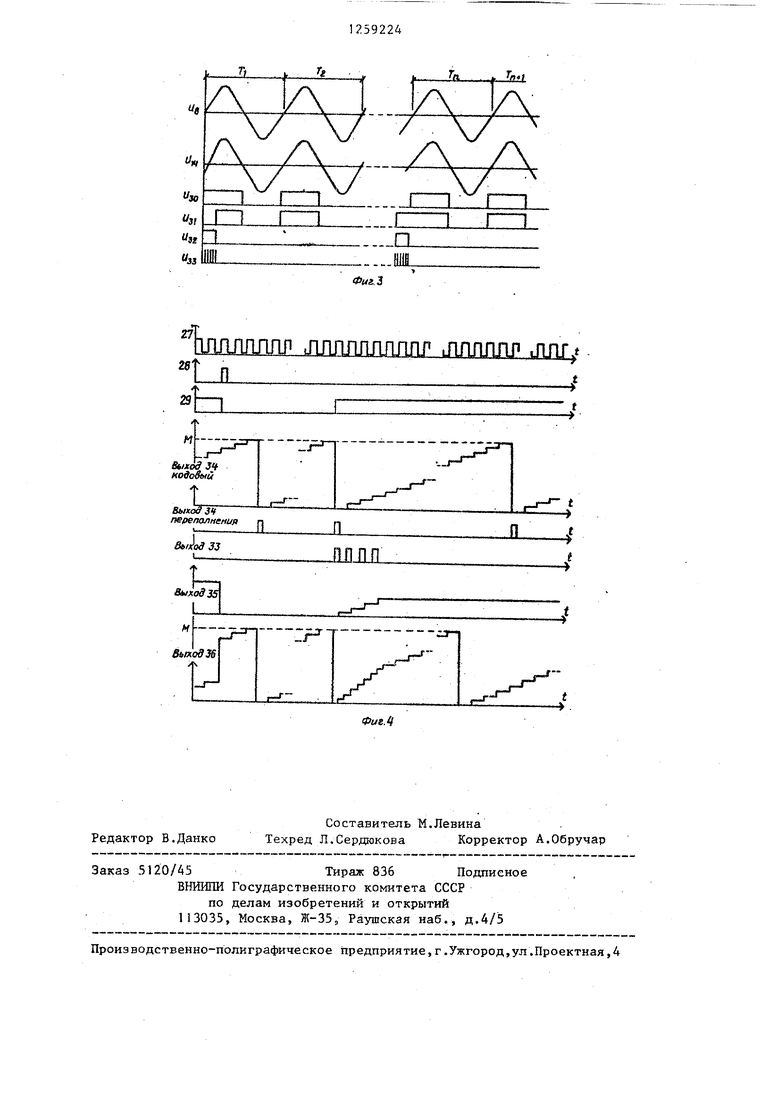
На фиг. представлена функциональная схема системы; на фиг.2 - структура фазоуправляющего блока; на фиг.З и 4 - эпюры работы элементов фазоуправляющего блока.
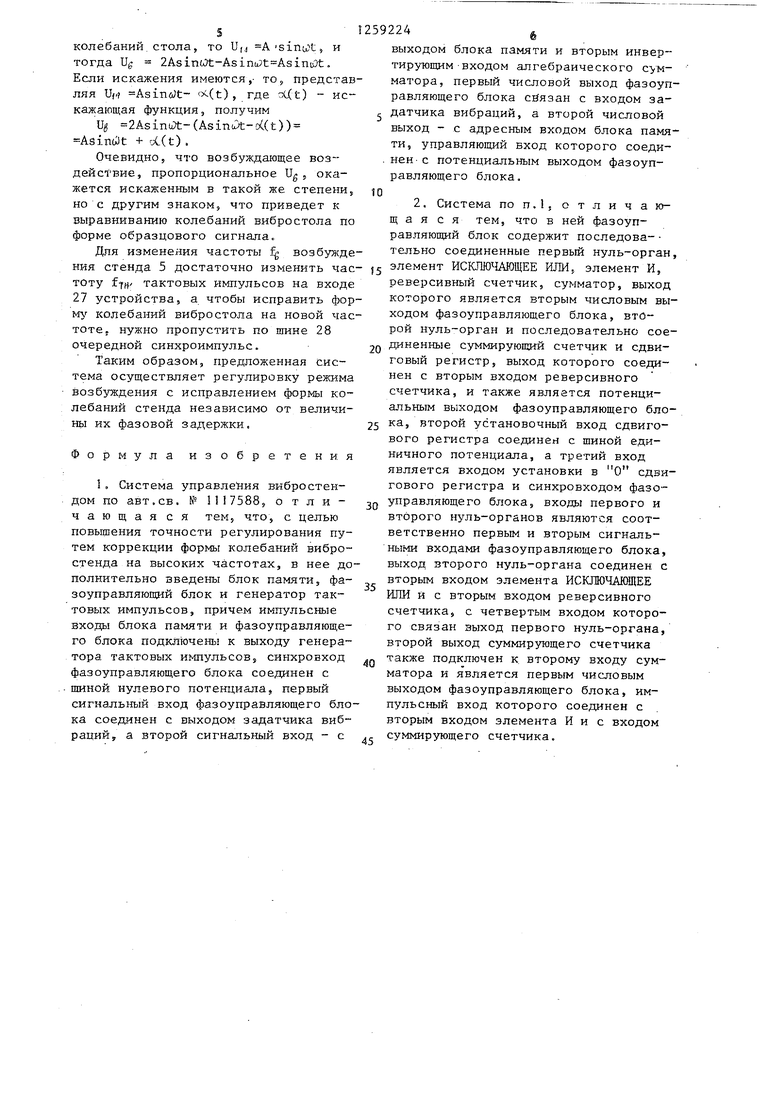
Система управления вибростендом содержит датчик 1 вибраций, первый предварительный усилитель 2, усилитель 3 обратной связи, усилитель 4 мощности, вибростенд 5, алгебраический сумматор 6, усилитель 7 с регулируемым коэффициентом усиления, задатчик 8 вибраций, первый блок 9 управления усилением, генератор Ю импульсов, второй предварительный усилитель 1I, второй блок 12 управления усилением, источник 13 регулируемого опорного напряжения, блок 14 памяти, фазоуправляющий блок 15. Задатчик 8 вибраций состоит из постоянного запоминающего устройства 16 значений функции siniDt (ПЗУ), цифроанало- гового преобразователя 17 (ЦА11), фильтра 18 нижних частот (ФНЧ). Блок
14памяти содержит аналого-цифровой преобразователь 19 (АЦП), оперативное запоминающее устройство 20 (ОЗУ) цифроаналоговый преобразователь 21
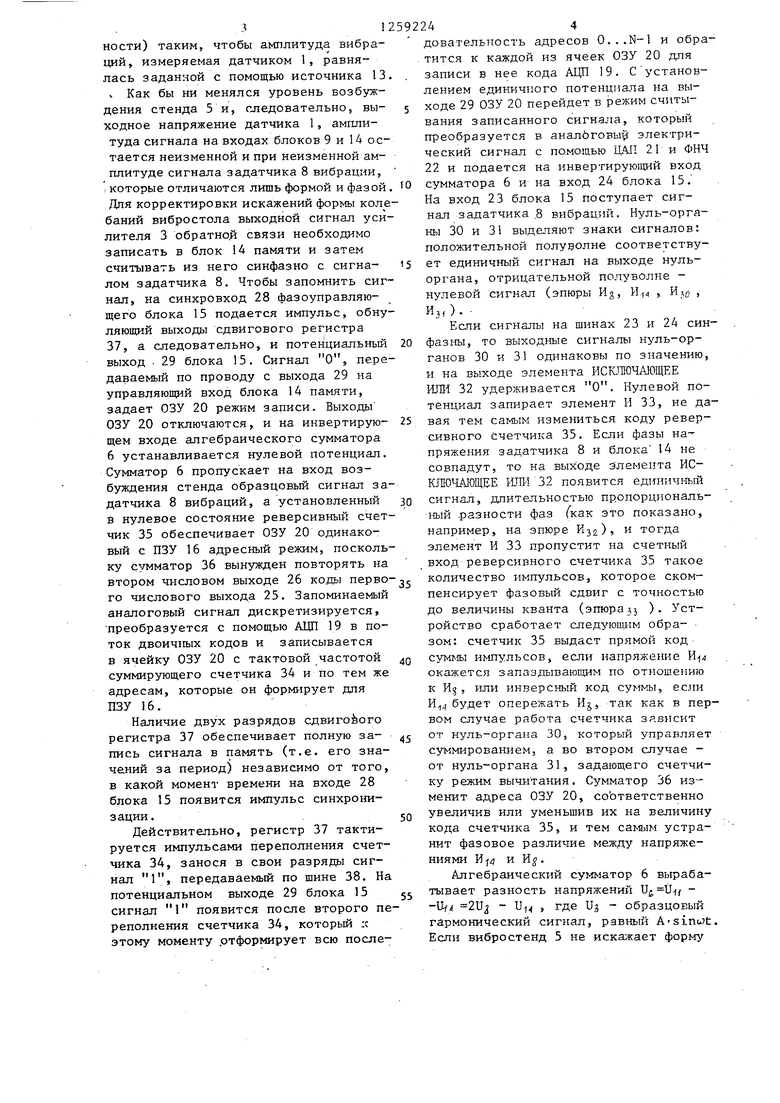
и фильтр 22 нижних частот. Фазоуп- равляющий блок 15 имеет сигнальные входы 23 и 24 - первый и второй соответственно, числовые выходы 25 и 26 - первый и второй соответственно, импульсный вход 27, синхровход 28, потенциальный выход 29, а также нуль- органы 30 и 31, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 32, И 33, суммирующий счетчик 34, реверсивный счетчик 35, сумматор 36, сдвиговый двухразрядный регистр 37 с подключенной к его входу последовательного занесения шиной 38 единичного потенциала. Сигнал на импуль- сньй вход 27 поступает с тактового генератора 39.
Устройство работает следующим образом.
На вход 27 в фазоуправляющий блок
15подаются с тактового генератора
10
15
25
592242
39 импульсы с частотой , пропорциональной частоте f возбуждения стенда. Частота « определяется из соотношения fти N - f, где N - коли5 честно точек на период сигнала, равное объему суммирующего счетчика 34 (весу разряда переполнения). Такой же объем N имеют счетчик 35 и каждое из запоминающих устройств: ПЗУ 16 и ОЗУ 20. Импульсы с шины 27 тактируют счетчик 34, вырабатывающий последовательность натуральных чисел в виде непрерывно повторяющегося ряда значений от О до N-1. С первого числового выхода 25 блока 15 эти числа передаются в задатчик 8 вибрации на адресный вход ПЗУ 16, ячейки которого содержат отсчеты функции синуса. Номер ячейки пропорционален фазе от20 счета, определяемой с дискретностью 2fi/N. Поэтому время прохождения чисел одного ряда по адресным шинам ПЗУ 16 соответствует одному периоду гармонической функции, формируемой на его выходе в виде потока кодов и преобразуемой в электрическое колебание элементами ЦАП 17 и ФНЧ 18,
С выхода задатчика 8 вибрации гармонический сигнал определенной ам30 плитуды А принимается на вход предварительного усилителя 11, который увеличивает амплитуду до значения 2А. Усиленный сигнал подводится к прямому входу алгебраического сумма35 тора 6. На инверсный вхОд алгебраического сумматора 6 от датчика 1 через предварительный усилитель 2, регулируемый усилитель 3 обратной связи и блока 14 памяти поступает сиг40 нал,равный по амплитуде сигналу задатчика 8. Это равенство поддерживается первым блоком 9 управления усилением, которьй сравнивает подводи- N2)ie к нему сигналы задатчика 8 и уси45 лители 3, приводя амплитуду последнего к величине А. Блок 9 управления усилением реализует импульсно-астати- ческое управление, используя для этого, как и в известном устройстве, пе50 риодические сигналы в виде пилообразного напряжения от генератора 10 импульсов.
Аналогичным образом второй блок 12 управления усилением, сравнивая
55 сигналы предварительного усилителя 2 и источника 13 опорного напряжения, поддерживает уровень возбуждения вибростенда 5 (через усилитель 4 мощности) таким, чтобы амплитуда вибраций, измеряемая датчиком 1, равнялась заданной с помощью источника 13
Как бы ни менялся уровень возбуждения стенда 5 и, следовательно, вы- ходкое напряжение датчика 1, амплитуда сигнала на входах блоков 9 и 14 остается неизменной и при неизменной амплитуде сигнала задатчика 8 вибрации, : которые отличаются лишь формой и фазой Для корректировки искажений формы колебаний вибростола выходной сигнал усилителя 3 обратной связи необходимо записать в блок 14 памяти и затем считывать из него синфазно с сигна- лом задатчика 8. Чтобы запомнить сигнал, на синхровход 28 фазоуправляю- щего блока 15 подается импульс, обнуляющий выходы сдвигового регистра 37, а следовательно, и потенциальный выход . 29 блока 15. Сигнал О, передаваемый по проводу с выхода 29 на управляющий вход блока 14 памяти, задает ОЗУ 20 режим записи. Выходы ОЗУ 20 отключаются, и на инвертирую- щем входе алгебраического сумматора 6 устанавливается нулевой потенциал. Сумматор 6 пропускает на вход возбуждения стенда образцовый сигнал задатчика 8 вибраций, а установленный в нулевое состояние реверсивный счетчик 35 обеспечивает ОЗУ 20 одинаковый с ПЗУ 16 адресный режим, поскольку сумматор 36 вынужден повторять на втором числовом выходе 26 коды первого числового выхода 25. Запоминаемый аналоговый сигнал дискретизируется, преобразуется с помощью АЦП 19 в поток двоичных кодов и записывается в ячейку ОЗУ 20 с тактовой частотой суммирующего счетчика 34 и по тем же адресам, которые он формирует дпя ПЗУ 16,
Наличие двух разрядов сдвиго:Ього регистра 37 обеспечивает полную за- пись сигнала в память (т.е. его значений за период) независимо от того, в какой момент времени на входе 28 блока 15 появится импульс синхронизации.
Действительно, регистр 37 тактируется импульсами переполнения счетчика 34, занося в свои разряды сигнал 1, передаваемый по шине 38. На потенциальном выходе 29 блока 15 сигнал 1 появится после второго переполнения счетчика 34, которьй :с этому моменту ртформирует всю последовательность адресов O...N-1 и обра ,тится к каждой из ячеек ОЗУ 20 для записи в нее кода АЦП 19. С установлением единичного потенциала на выходе 29 ОЗУ 20 перейдет в режим считывания записанного сигнала, который преобразуется в аналЪговыу электрический сигнал с по.мощью ЦАП 21 и ФНЧ 22 и подается на инвертирующий вход сумматора 6 и на вход 24 блока 15. На вход 23 блока 15 поступает сигнал задатчика .8 вибраций. Нуль-органы 30 и 31 выделяют знаки сигналов: положительной полуволне соответствует единичный сигнал на выходе нуль- органа, отрицательной полуволне - нулевой сигнал (эпюры И, И. , Ило , Из)..
Если сигналы на шинах 23 и 24 син фазны, то выходные сигналы нуль-органов 30 и 31 одинаковы по значению и на выходе элемента ИСКЛЮЧАЮЩЕЕ MIDi 32 удерживается О. Нулевой потенциал запирает элемент И 33, не давая тем самым измениться коду реверсивного Счетчика 35. Если фазы напряжения задатчика 8 и блока 14 не совпадут, то на выходе элемента ИС- КЛЮ ШОЩЕЕ ИП1-5 32 появится единичный сигнал, длительностью пропорциональный .разности фаз (как это показано, например, на эпюре Иза) и тогда элемент И 33 пропустит на счетный вход реверсивного счетчика 35 такое количество импульсов, которое скомпенсирует фазовый сдвиг с точностью до величины кванта (эпюра 33 ) Устройство сработает следующим образом: счетчик 35 выдаст прямой код суммы иьтульсов, если напряжение И окажется запаздывающим по отношению к И , или инверсный код суммы, ecjm H,j будет опережать Hj, так как в первом случае работа счетчика зависит от нуль-органа 30, который управляет суммированием; а во втором случае - от нуль-органа 31, задающего счетчику режим вычитания. Сумматор 36 изменит адреса ОЗУ 20, соЪтветственно увеличив или уменьшив их на величину кода счетчика 33, и тем самым устранит фазовое различие между напряжениями и Hj.
Алгебраический 6 вырабатывает разность напряжений - 2112 и Д Uj образцовый гармонический сигнал, равный A-siniJt Если вибростенд 5 не иска;кает форму
колебаний, стола, то U( A sin j}t5 и тогда Ug 2AsintJt-AsinitJt Asinii)t. Если искажения имеются,- TOj представляя U( Asinu t- (t), где 30(t) искажающая функция, получим
Ug 2Asint :-(Asini3t-c((t)) Asin(;)t + c4(t) .
Очевидно, что возбуждающее воздействие, пропорциональное U, окажется искаженным в такой же степени, но с другим знаком, что приведет к выравниванию колебаний вибростола по форме образцового сигнала.
Для изменения частоты .1 возбуждения стенда 5 достаточно изменить частоту ftft тактовых импульсов на входе 27 устройства, а чтобы исправить форму колебаний вибростола на новой частоте, нужно пропустить по шине 28 очередной синхроимпульс.
Таким образом, предложенная система осуществляет регулировку режима возбуждения с исправлением формы колебаний стенда независимо от величи- нь1 их фазовой задержки.
Формула изобретения
1, Система управления вибростендом по авт.ев, № 1117588, отличающая ся тем, что, с целью повышения точности регулирования путем коррекции формы колебаний вибростенда на высоких частотах, в нее дополнительно введены блок памяти, фа- зоуправляющий блок и генератор тактовых импульсов, причем импульсные зходы блока памяти и фазоуправляюще- го блока подключень к выходу генератора тактовых импульсов, синхровход фазоуправляющего блока соединен с шиной нулевого потенциала, первый сигнальньш вход фазоуправляющего блока соединен с выходом задатчика вибраций а второй сигнальный вход - с
59224g,
выходом блока памяти и вторым инвертирующим - входом алгебраического сумматора, первый числовой выход фазоуправляющего блока сйязан с входом за- J датчика вибраций, а второй числовой выход - с адресным входом блока памяти, управляющий вход которого соеди- .нен-с потенциальным выходом фазоуправляющего блока.
10
2, Система non.l, отличающая с я тем, что в ней фазоуп- равляющий блок содержит последова-- тельно соединенные первый нуль-орган,
,5 элемент ИСКЛЮ ШОЩЕЕ ИЛИ, элемент И, реверсивный счетчик, сумматор, выход которого является вторым числовым выходом фазоуправляющего блока, второй нуль-орган и последовательно сое2Q диненные суммирующий счетчик и сдвиговый регистр, выход которого соединен с вторым входом реверсивного счетчика, и также является потенциальным выходом фазоуправляющего бло5 ка, второй установочный вход сдвигового регистра соединен с шиной единичного потенциала, а третий вход является входом установки в О сдвигового регистра и синхровходом фазоJQ управляющего блока, входы первого и второго нуль-органов являются соответственно первым и вторым сигнальными входами фазоуправляющего блока, выход второго нуль органа соединен с вторым входом элемента ИСКЛЮЧАЩЕЕ ИЛИ и с вторым входом реверсивного счетчика, с четвертым входом которого связан выход первого нуль-органа, второй выход суммирующего счетчика
Q также подключен к. второму входу сумматора и является первым числовым выходом фазоуправляющего блока, импульсный вход которого соединен с вторым входом элемента И и с входом
суммирующего счетчика.
5
фиг. 1
23 2
/
К I
/A/
I-1
..
I, ft -f
i/ К
S
..-L
П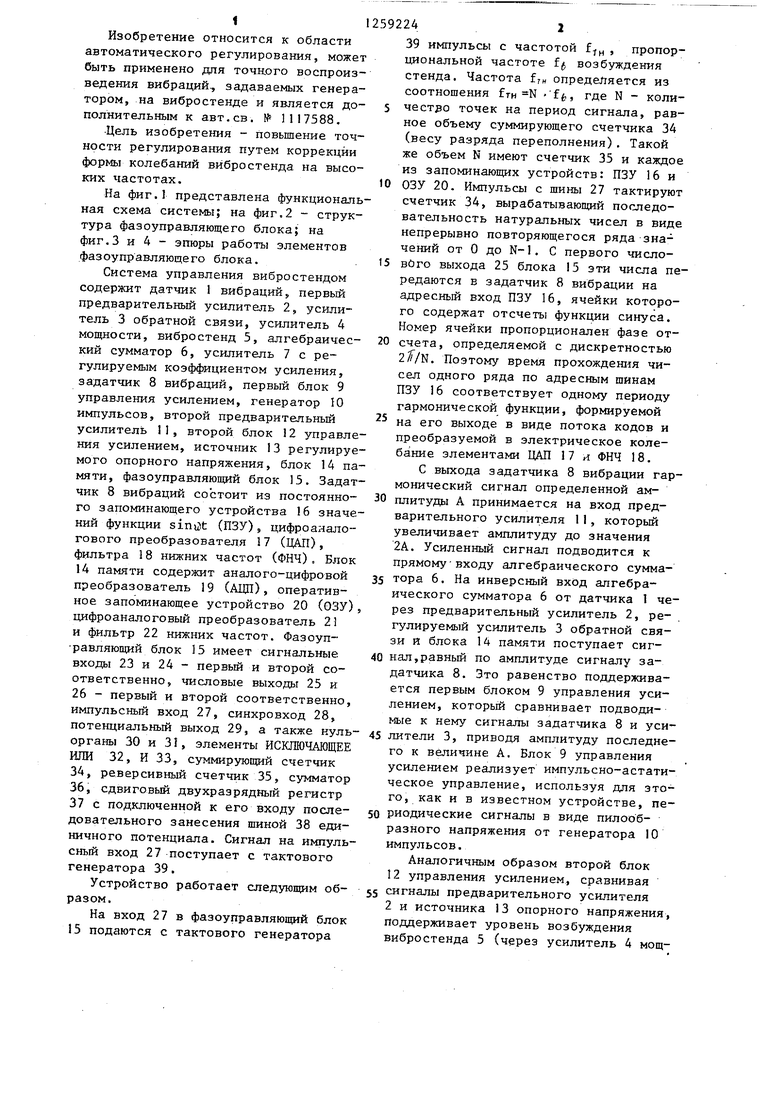
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вибростендом | 1985 |
|
SU1305649A1 |
| Система управления вибростендом | 1986 |
|
SU1368863A1 |
| Система управления вибростендом | 1982 |
|
SU1117588A1 |
| Устройство для управления синусоидальными вибрациями | 1985 |
|
SU1269112A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| Система для управления синусоидальными вибрациями | 1987 |
|
SU1441365A1 |
| Вибростенд | 1983 |
|
SU1156026A1 |
| Устройство для передачи информации | 1989 |
|
SU1736001A1 |
| Аналого-цифровой преобразователь интегральных характеристик электрических величин | 1981 |
|
SU1035790A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
Изобретение относится к области автоматического регулирования и может быть применено для точного воспроизведения вибраций, задаваемых генератором, на вибростенде. Цель изобретения - повышение точности регулирования путем коррекции формы колебаний вибростенда на высоких частотах. Система управления вибростендом содержит датчик вибраций, два предварительных усилителя, усилитель обратной связи, усилитель мощности, вибростенд, алгебраический cyi-a-iaTop, усилитель с регулируемым коэффициентом усиления, задатчик вибрЕщий,, два блока управления усилителем, генератор импульсов, источник регулируемого опорного напряжения, блок памяти и фазоуправляющий блок. Фазоуправля- ющий блок содержит нуль-орган, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, элемент И, реверсивный счетгшк, сумматор, суммирующий счетчик и сдвиговый регистр. Введение фазоуправляющего блока и блока памяти позволяет осуществлять регулировку режима возбуждения с исправлением формы колебаний стенда независимо от величины их фазовой задержки. 1 з.п.ф-лы, 4 ил. S
27
ЬлЛЛЛЛПГ ЛЛЛЛЛЛЛЛЯП ЛЛЛЯПЛ ЛЯГ)
t л..
п
л
лллл
м ВыходЗб
ТР
Редактор В.Данко
Составитель М.Левина Техред Л.Сердгакова Корректор А.Обручар
Заказ 5120/45Тираж 836 Подпиеное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-ЗЗ, Раушская наб., д.4/5
Производственно-полиграфическое предприятие,г.Ужгород,ул.Проектная,4
JL
| Система управления вибростендом | 1982 |
|
SU1117588A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
