Изобретение относится к электроехнике и может быть использовано электроприводах постоянного тока.
Целью изобретения является овьппение качества переходных проессов при изменении температуры нагрева электродвигателя.
Fla чертеже представлена схема электропривода.
Электропривод постоянного тока содержит электродвигатель 1, под- ключенньй к выходу управляемого выпрямителя 2, входом соединенного с выходом пи-регулятора 3 тока П- регулятор 4 частоты вращения вход которого связан с выходом задатчика 5 частоты вращения, а выход связан с входом пи-регулятора 3 тока, датчики тока 6 и частоты вращения 7, датчик 8 температуры нагрева электродвигателя 1, масщтабирующий блок 9, блок 10 обратно пропорционального преобразования, три управляемых резистора 11, 12 и 13. Первый управляе- i мый резистор 11 включен между выходом задатчика 5 частоты вращения и входом регулятора 4 частоты вращения, второй управляемый резистор 12 - между выходом регулятора 4 частоты вращения и входом регулятора 3 тока, третий резистор 13 - в цепь обратной связи пи-регулятора 3 тока, управляющий вход первого управляемого резистора 11 подключен к выходу масштабирующего преобразователя 9, а управляющие входы второго 12 и третьего 13 управляемых резисторов соединены с выходом блока 10 обратно пропорционального преобразования. В цепь обратной связи регулятора 4 включен резистор 14, а в цепь обратной связи регулятора 3 - конденсатор 15.
Блок 9 масштабирования может быть вьтолнен, например, на сумматоре, блок 10 обратно пропорционального преобразования - в виде блока деления, управляемые резисторы 11, 12 и 13 могут быть выполнены в виде полевых транзисторов, управляемьт напряжением.
Электропривод работает следующим образом.
Сигнал заданной скорости с выхода задатчика 5 через первый управляемый резистор 11, регулятор 4, второй уп- равляем111й резистор 12, регулятор 3 тока и управляемый выпрямитель 2 поступает на электродвигатель 1. Регуляторы 4 и 6, на входы которых через датчики частоты вращения 7 и тока 6 поступают сигналы обратных связей, обеспечивают подчиненное регули- рование скорости и тока.
При подчиненном регулировании скорости и тока параметры регуляторов настраивают на технический или симметричный (или другие) оптимумы.
При оптимизации, например, по техническому оптимуму передаточная функция ПИ регулятора тока 3 Wp равна
W - -R ll-l-PTs.)
,5 ,К,
(1)
где Т - малая постоянная времени;
К - коэффициент передачи датчика
тока
К - коэффициент усиления управляемого выпрямителя , Р - оператор Лапласа;
fr -- - электромагнитная постоянная 25 времени
L - индуктивность якоря. Передаточная функция пропорционального регулятора скорости 4 Wp, при настройке на технический оптимум 30 равна
Кг TiiC А
,
(2)
где К - Коэффициент передачи датчика
частоты вращенияf
Сд - постоянная электродвигателя. Параметры насТройки регуляторов жестко связаны с сопротивлением якорной- цепи.
В процессе работы электродвигателя 1 непрерывно изменяется температура его нагрева, что приводит- к непрерывному изменению сопротивления якорной цепи. Сопротивление якорной цепи R
вычисляется по формуле
R, R,(1 +cit ), (3) где Rfl - сопротивление якорной цепи
при О С; 0 - температурный коэффициент
сопротивления J t - температура. При изменении температуры от О до 150°С oi для меди равен 0,0043 . Сопротивление якорной цепи в диапазоне 0-150°С увеличивается в 1,645 раза, это приводит к тому, что пара метры настройки регуляторов скорости и тока становятся существенно отличными от оптимальных.
Для стабилизации качества переходных процессов скорости и тока при изменении температуры якоря необходимо s изменять коэффициенты усиления регуляторов частоты вращения 4 и тока 3 и постоянную времени регулятора тока 3 в функции сопротивления якорной цепи.
Сигнал температуры якоря с датчи- О ка 8 температуры поступает на масштабирующий блок 9, напряжение на .выходе KdToporo равно
(4) 5
и к,(1 ) K,R,,
где К, - коэффициент преобразования.
Сигнал с выхода блока 9 подается на управляющий вход первого управляемого резистора 11 и на вход блока 1020 обратно пропорционального преобразования .
Сопротивление первого управляемого
рези стора 11 равно
25
R ,.
Сопротивление второго 12 и третьего 13 управляемых резисторов соответственно равны:
(4) 5
KJL. K.R,
R,
К„, К
3
9 К.
Ь
К R,
- коэффициенты преобразования соответствующих управляемых35 резисторов.
Если выбрать К R , то сопротивление первого управляемого резистора 11 будет изменяться пропорционально
Электропривод постоянного тока, содержащий электродвигатель, подключенный к выходу управляемого вьшрями- теля, входом соединенного с выходом пи-регулятора тока, П-регулятор частоты вращения, вход которого связан с выходом задатчика частоты вращения, а выход - с входом ПИ-регулятора тока, датчика тока и частоты вращения, выходы которых подключены к соответствующим входам пи-регулятора тока и
R
а сопротивления второго 12 и тре-40 П-регулятора частоты вращения, о т тьего 13 управляемых резисторов - обратно пропорционально R.
Передаточная функция регулятора 4 частоты вращения при использовании, пропорционального регулятора имеет вид
личающийся тем, что, с целью повьшения качества переходных процессов электропривода при изменении температуры нагрева электродвига45 теля, в него введены последовательно соединенные датчик температуры нагрева электродвигателя, ма сштабирую- щий блок и блок обратно пропорционального преобразования, а также три
W
PC
-5л
R.
где R - резистор 14 корректирующего звена 4.
Передаточная функция пропорционально-интегрального регулятора тока 3 равна:
W.
RjCP
где С - емкость конденсатора цепи обратной связи.
При выборе
Kj. 2 ,
получим регулятор с передаточной функцией (2) . При выборе
к7
-I-
2 ,
ПОЛУЧИМ регулятор с передаточной функцией (1), коэффициент усиления кото- рого изменяется пропорционально R , а постоянная времени регулятора пропорциональна якорной постоянной электродвигателя 1.
Таким образом, предлагаемый электропривод обеспечивает повышение качества переходных процессов частоты вращения и тока при изменяющемся в процессе работы сопротивлении якор- ной цепи.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, подключенный к выходу управляемого вьшрями- теля, входом соединенного с выходом пи-регулятора тока, П-регулятор частоты вращения, вход которого связан с выходом задатчика частоты вращения, а выход - с входом ПИ-регулятора тока, датчика тока и частоты вращения, выходы которых подключены к соответствующим входам пи-регулятора тока и
П-регулятора частоты вращения, о т личающийся тем, что, с целью повьшения качества переходных процессов электропривода при изменении температуры нагрева электродвигателя, в него введены последовательно соединенные датчик температуры нагрева электродвигателя, ма сштабирую- щий блок и блок обратно пропорционального преобразования, а также три
управляемых резистора, причем первый управляемый резистор включен между выходом задатчика частоты вращения и входом П-рёгулятора частоты вращения, второй - между выходом П-регулятора
частоты вращения и входом ПИ-регулятора тока, а третий - в цепь обратной связи ПИ-регулятора тока, управляющий вход первого управляемого резистора
S. 1261076ft
подключен к выходу масштабирующеготоров соединены с выходом блока обпреобразователя, а управляющие вхрды ратно пропорционального преобразова- второго и третьего.yпpaвляe ыx резне- ния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТЕМПЕРАТУРОЙ ПРИ ИНДУКЦИОННОМ НАГРЕВЕ | 1992 |
|
RU2076465C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1998 |
|
RU2158467C2 |
| Электропривод постоянного тока с управляемой механической передачей | 1990 |
|
SU1823122A1 |
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
Изобретение относится к электротехнике и может быть использовано- в электроприводах постоянного тока. Повьшение качества переходных процессов при изменении температуры нагрева достигается за счет введения последовательно соединенных датчика ;температуры 8 нагрева электродвигателя 1, масштабирующего блока 9 и блока 10 обратно-пропорционального преобразования, а также трех управляемых резисторов 11, 12, 13, включенных соответственно во входные цепи регулятора 3 тока, регулятора 4 частоты вращения и в цепь обратной связи регулятора 3 тока. В данном устройстве для улучшения качества переходньпс процессов скорости и тока изменяется коэффициент усиления регулятора пропорционально сопротивлению якорной цепи, а постоянная времени регулятора - пропорциональна якорной постоянной электродвигателя 1. 1 ил. I (Л Is3 Oi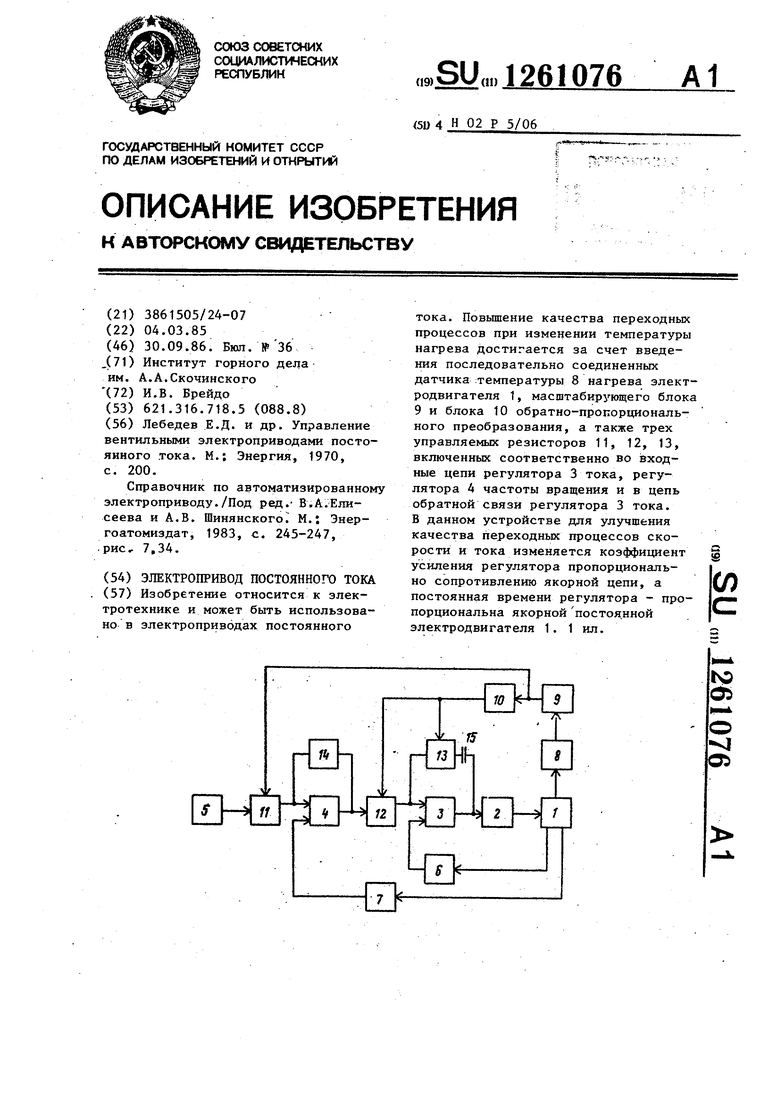
| Лебедев Е.Д | |||
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| М.; Энергия, 1970, с | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| Справочник по автоматизированному электроприводу./Под ред.- В.А.Елисеева и А.В | |||
| Шинянского М.; Энер- гоатомиздат, 1983, с | |||
| Льночесальная машина | 1923 |
|
SU245A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
