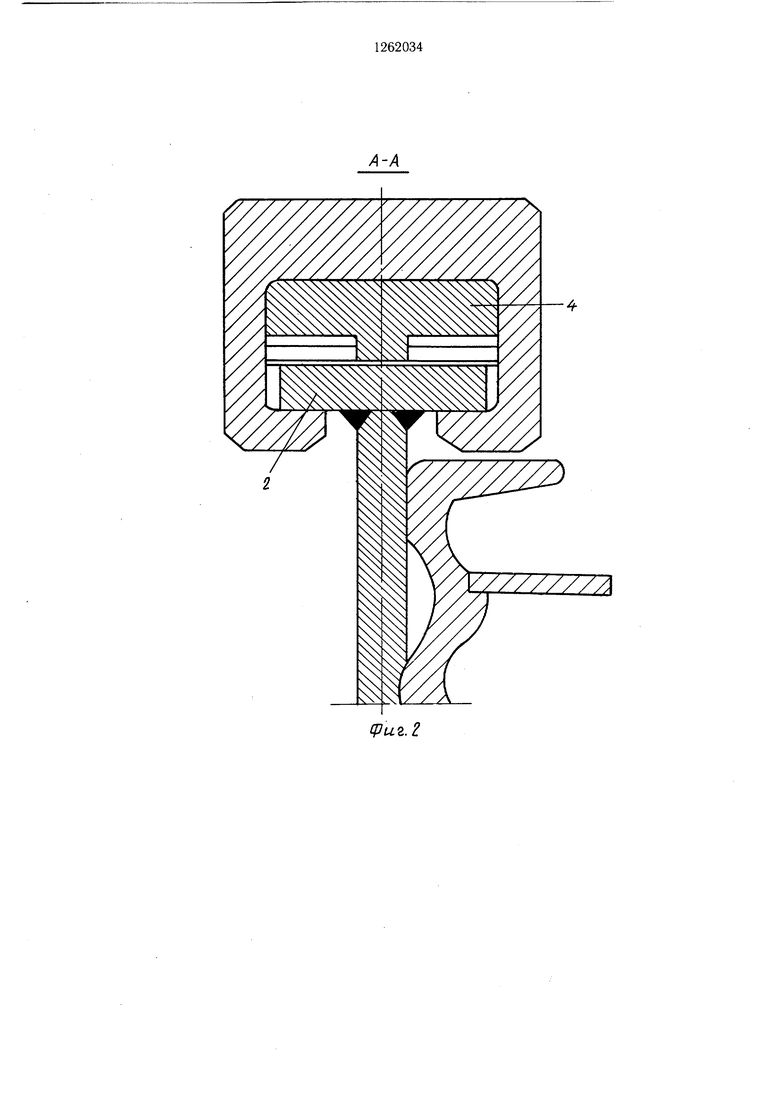
Изобретение относится к горной технике и предназначено для механизмов перемещения домкратного типа горных комбайнов. Цель изобретения - повышение надежности работы при подаче клиньев в зону заклинивания и выводе из нее. На фиг. 1 изображен предлагаемый механизм, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Механизм перемещения горного комбайна включает домкрат 1 перемещения, направляющую 2 и стопорное устройство в виде корпуса 3 с клиньями 4 и обратными захватами 5 за направляющую 2. Корпус 3 имеет размещенные внутри него подвижные 6 и 7 и неподвижные 8 электромагниты, представляющие собой магнитопроводы с обмотками 9. Оси 10 щарнирного соединения клиньев 4 с подвижными электромагнитами 6 и 7 размещены в вертикаль ных пазах проушин 11 электромагнитов 6 и .7, а торцы клиньев 4 и корпус 3 выполнены с наклонными плоскостями а и б (а и 6i) с возможностью взаимодействия между собой при работе домкрата 1 перемещения. Таким образом, заклинивание и освобождение клиньев 4 осуществляет домкрат 1 перемещения, цилиндр которого закреплен на корпусе горного комбайна. Механизм работает следующим образом. При направлении перемещения комбайна справа налево (фиг, 1) работает щ1-оковая полость домкрата 1 перемещения и происходит его сокращение. На обмотки электромагнитов 8 и 6 подается напряжение постоянного тока таким образом, что между левым подвижным электромагнитом 6 и неподвижным 8 возникают магнитные поля одной полярности и подвижный электромагнит 6, отталкиваясь от неподвижного 8, перемещается в левое крайнее положение. При этом левый клин 4, шарнирно соединенный с электромагнитом 6, подается в зону заклинивания между корпусом 3 и направляющей 2 и заклинивается усилием подачи домкрата 1 перемещения, в результате чего осуществляется передача тягового усилия и комбайн движется влево. После полного сокращения домкрата 1 перемещения подается команда на выдвижку щтока и одновременно на изменение полярности обмоток 9 левого подвижного электромагнита 6 и неподвижного 8 на разноименную. В результате подвижный электромагнит 6 притягивается к неподвижному 8, а клин 4 усилием домкрата 1 перемещения освобождается из заклиненного состояния, перемещается относительно корпуса 3 и, взаимодействуя наклонной плоскостью с с иаклопной плоскостью б корпуса 3, поднимается над направляющей 2. При этом ось 10 щарнирного соединения клина 4 свободно перемещается в вертикальном пазу проущины 11 электромагнита 6, а клин 4 выводится из зоны заклинивания и не препятствует холостому перемещению устройства по направляющей 2. После полной выдвижки щтока цикл повторяется. Для обеспечения заклинивания и исключения смещения устройства относительно направляющей 2 корпус 3 имеет обратные захваты 5. Первый подвижный электромагнит 7 устройства при движении комбайна влево постоянно притянут к неподвижно.му 8, а щарнирно соединенный с ним клин 4 выведен из зоны заклинивания при взаимодействии наклонных плоскостей а и б. При изменении направления перемещения комбайна слева направо работа механизма аналогична с теми отличиями, что левый электромагнит 6 постоянно находится в притянутом положении к неподвижному электромагниту 8 и щарнирно соединенный с ним клин 4 выведен из зоны заклинивания. При этом правый подвижный электромагнит 7 является рабочим, подает клин 4 в зону заклинивания фи передаче тягового усилия и выводит его из зоны заклинивания при холостом перемещении стопорного устройства. Заклинивание осуществляется при работе порщневой полости домкрата 1 перемещения, а холостое перемещение - при работе щтоковой. Для непрерывной подачи комбайна необходимо ставить два попеременно работающих механизма перемещения предлагаемой конструкции. Формула изобретения Механизм перемещения горного комбайна, включающий домкрат перемещения, направляющую, стопорное устройство в виде корпуса с клиньями, отличающийся тем. что, с целью повыщения надежности работы при подаче клиньев в зону заклинивания и выводе из нее, корпус снабжен размещенными внутри него подвижными и неподвижными электромагнитами, при этом подвижные электромагниты имеют вертикальные проущины, в которых размещены оси, связанные с клиньями, причем корпус и торцы клиньев выполнены с наклонными плоскостями с возможностью взаимодействия между собой при работе домкрата перемещения.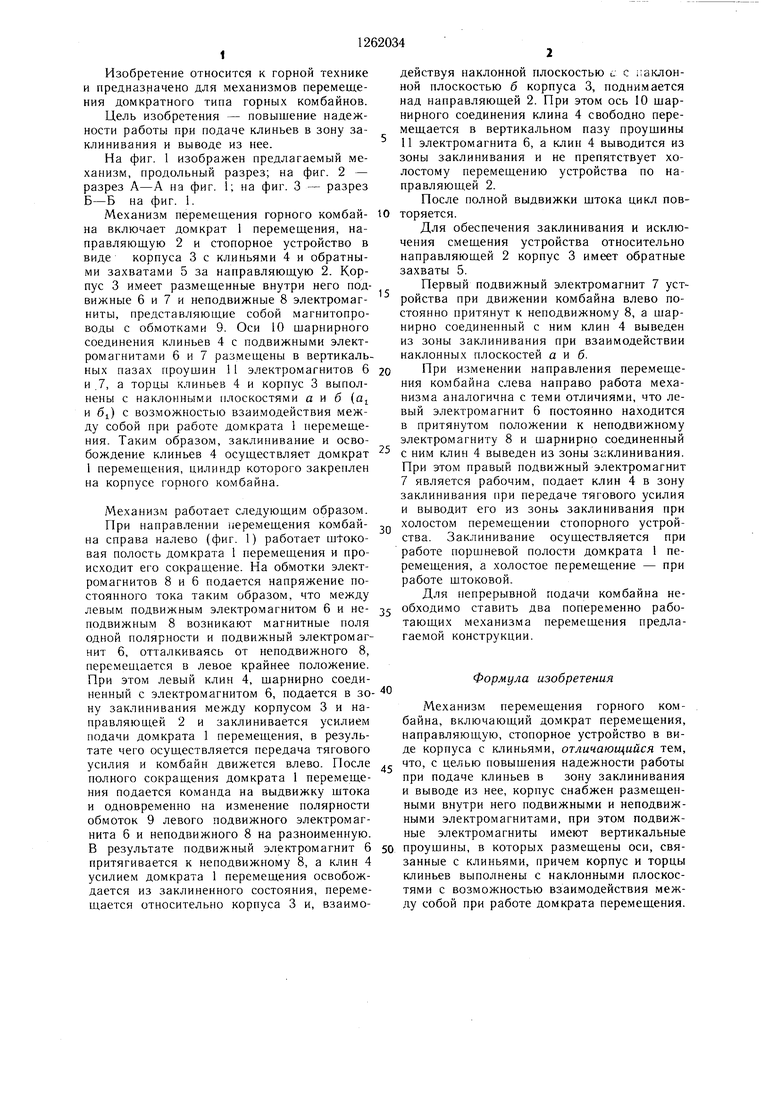
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения горного комбайна | 1984 |
|
SU1196501A1 |
| Проходческий комбайн | 1978 |
|
SU881313A1 |
| Механизм перемещения горного комбайна (его варианты) | 1980 |
|
SU929836A1 |
| КРЕПЬ АГРЕГАТНАЯ (ВАРИАНТЫ) | 1995 |
|
RU2130121C1 |
| Самоходный перегружатель горных пород с верхнего подступа на нижний транспортный горизонт | 1978 |
|
SU750075A1 |
| Механизм подачи горной машины по направляющей | 1981 |
|
SU1073454A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Тормозное устройство выемочного комбайна | 1986 |
|
SU1411466A1 |
| Проходческий комбайн | 1980 |
|
SU899982A2 |
Изобретение относится к горной промышленности и предназначено для перемещения горных комбайнов по направляющим. С целью повышения надежности работы при подаче клиньев в зону заклинивания и вы-- т т т тт воде из нее, корпус 3 с клиньями 4 снабжен подвижными 6, 7 и неподвижными 8 электромагнитами. Оси 10 шарнирного соединения клиньев 4 с подвижными электромагнитами 6, 7 размещены в вертикальных пазах проущин 11. В зависи.мости от направления перемещения комбайна на подвижный 6 
| Механизм перемещения горного комбайна (его варианты) | 1980 |
|
SU929836A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
