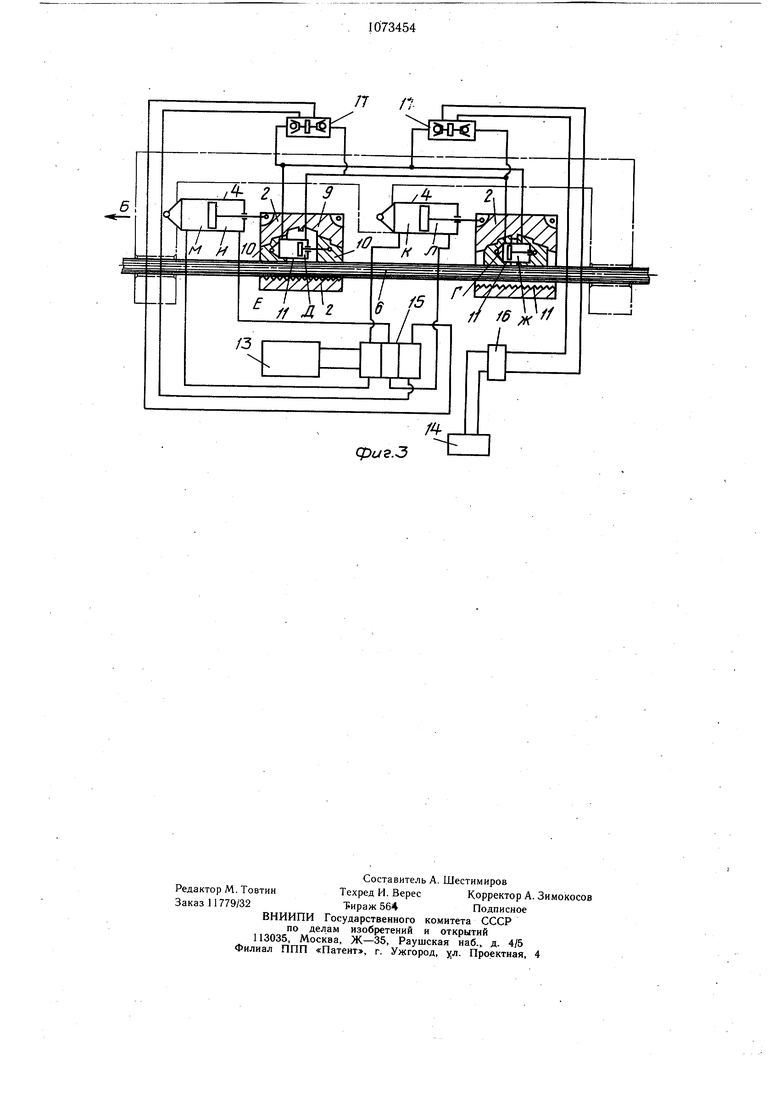
Изобретение относится к горной промышленности, преимущественно к механизмам подачи горной машины по направляющей для подземной выемки угля в очистных забоях. Известен механизм подачи горной мащины по направляющей, включающий гидродомкраты, цилиндры которых соединены с корпусом комбайна проушинами, а штоки - с захватами, установленными с возможностью взаимодействия с направляющей, при этом соединение гидроцилиндра с корпусом выполнено в виде вкладышей, установленных в корпусе, и шаровых сегментов-, расположенных на цилиндре 1J. Указанная конструкция механизма подачи характеризуется низкой надежностью из-за интенсивного износа шарнирных и подвижных соединений. Наиболее близким к изобретению техническим рещением является механизм подачи горной машины по направляющей, включающий .корпус с размещенными в нем захватами, щарнирно связанными с гидродомкратами, причем противположно направленные гидродомкраты штоками шарнирно прикреплены к корпусу, а цилиндрами к захватам, выполненным из отдельных секций, связанных между собой шарнирно и снабженных гидродомкратами, расположенными перпендикулярно к направляющей 2. Однако данный механизм подачи сложен по своему конструктивному выполнению, име ет недостаточную надежность сцепления захвата с направляющей. Целью изобретения является повышение надежности сцепления захвата с направляющей независимо от направления подачи. Поставленная цель достигается тем, что механизм п7дГчи горноГмац1инь1по на правляюшей, включающий корпус с размещенными в нем захватами, шарнирно связанными с гидродомкратами, снабжен дополнительными гидродомкратами двойного действия, а захваты выполнены в виде бащмака с размещенными в нем ступенчатыми клиньями, при этом каждый дополнительный гидродомкрат щарнирно связан со ступенчатыми клиньями и расположен параллельно направляющей. На фиг. 1 изображен предлагаемый механизм; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - гидравлическая схема исполнительной части механизма. Механизм подачи горной мащины включает корпус 1 с размешенными в нем захватами 2, которые посредством шарниров 3 связаны с штоками гидродомкратов 4. Цилиндры гидродомкратов 4 посредством шарКиров 5 связаны с корпусом 1. Захваты 2 выполнены в &иде бащмака и охватывают направляющую 6. Каждый захват 2 включает две щеки: левую 7 и правую 8, жестко соединенные между собой через вкладыш 9. Между вкладышем 9, имеющим внутреннюю ступенчатую конусную поверхность В, и направляющей 6 установлены два клина 10 ступенчатой формы, которые связаны шарнирно при помощи гидродомкрата 11 двойного действия и находятся в постоянном контакте с направляющей 6. Гидродомкраты 11 расположены параллельно направляющей 6. Левая щека 7 захвата 2 в нижней части имеет профильную поверхность по форме направляющей 6. Для увеличения силы сцепления захвата 2 с направляющей 6 на профильной поверхности щеки 7 выполнены уступы 12 в виде зубьев. Гидравлическая схема включает два независимых друг от друга гидравлических привода 13 и 14, систему распределения 15 и подпитки 16, двух гидрозамков 17 и трубопроводов управления гидродомкратами, Движение горной машины обеспечивается согласованной работой двух устройств механизма подачи, путем попеременного перемещения на рабочий ход поршней гидродомкратов. Для осуществления подачи в направлении по стрелке Б поршневая полость Е, например, левого домкрата 11 захвата 2 и штоковая полость Ж правого домкрата захвата подключается к высоконапорной магистрали гидроприводов 13 и 14 через систему распределения 15, подпитки 16 и управляемых гидрозамков 17. Гидравлическим давлением рабочей жидкости раздвигается левый гидродомкрат 11, который воздействует на два клина 10, заставляя их скользить по направляющей 6 и внутренней конусной поверхности вклады Р ™ предварительно выбирается свободный ход захвата за счет ступенча™й формы клиньев,, а затем происходит зажатие левой щеки 7 захвата 2 на направляющей 6 по плоскости самотормозящих уклонов В. Одновременно с этим правый гидродомкрат 11 механизма захвата сокращается, сцепление захвата с направляющей 6 отсутствует и захват 2 может свободно перемещаться по направляющей относительно корпуса горной машины. Рабочая жидкость из полостей Д и Г левого и правого гидродомкратов 11 вытесняется на слив через управляемые гидрозамки 17 и систему распределения 15 подпитки 16. Для обеспечения постоянного (заданного) давления рабочей жидкости в поршнеgQg полости гидродомкрата 11 захвата 2, совершающего в данный момент рабочий ход (Т.е. сцепление захвата с направляющей), а также в целях повыщения надежности зацепления захвата с направляющей в момент передачи тягового усилия предусмотрены два управляемых гидрозамка 17 и независимая система подпитки 16 от гидропривода 14.
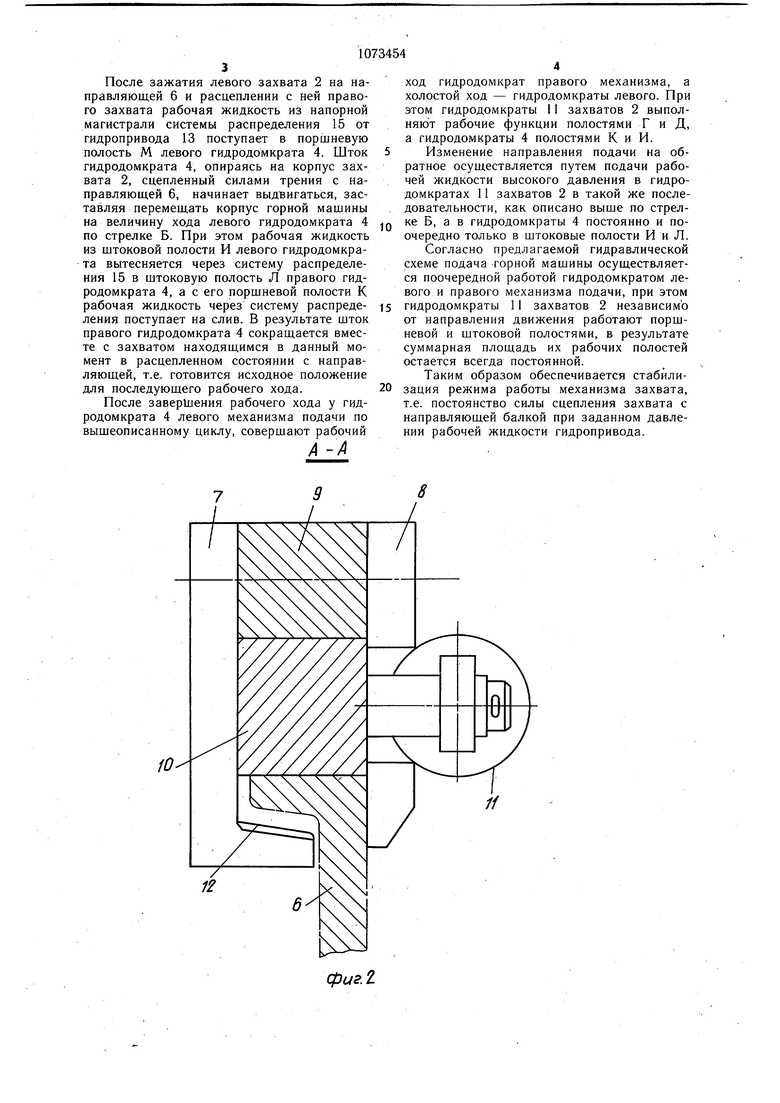
После зажатия левого захвата 2 на направляющей 6 и расцеплении с Ней правого захвата рабочая жидкость из напорной магистрали системы распределения 15 от гидропривода 13 поступает в поршневую полость М левого гидродомкрата 4. Шток гидродомкрата 4, опираясь на корпус захвата 2, сцепленный силами трения с направляющей 6, начинает выдвигаться, заставляя перемещать корпус горной машины на величину хода левого гидродомкрата 4 по стрелке Б. При этом рабочая жидкость из штоковой полости И левого гидродомкрата вытесняется через систему распределения 15 в штоковую полость Л правого гидродомкрата 4, а с его поршневой полости К рабочая жидкость через систему распределения поступает на слив. В результате шток правого гидродомкрата 4 сокращается вместе с захватом находящимся в данный момент в расцепленном состоянии с направляющей, т.е. готовится исходное положение для последующего рабочего хода.
После завершения рабочего хода у гидродомкрата 4 левого механизма подачи по выщеописанному циклу, совершают рабочий
/( -/4
ход гидродомкрат правого механизма, а холостой ход - гидродомкраты левого. При этом гидродомкраты 11 захватов 2 выполняют рабочие функции полостями Г и Д, а гидродомкраты 4 полостями К и И.
Изменение направления подачи на обратное осуществляется путем подачи рабочей жидкости высокого давления в гидродомкратах 11 захватов 2 в такой же последовательности, как описано выше по стрелке Б, а в гидродомкраты 4 постоянно и поочередно только в штоковые полости И и Л.
Согласно предлагаемой гидравлической схеме подача горной машины осуществляется поочередной работой гидродомкратом левого и правого механизма подачи, при этом гидродомкраты 11 захватов 2 независимо от направления движения работают поршневой и штоковой полостями, в результате суммарная плошадь их рабочих полостей остается всегда постоянной.
Таким образом обеспечивается стабилизация режима работы механизма захвата, т.е. постоянство силы сцепления захвата с направляющей балкой при заданном давлении рабочей жидкости гидропривода.
фиг.г
Я П
фб/г.3
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи горной машины | 1986 |
|
SU1420156A1 |
| МЕХАНИЗМ ПОДАЧИ ГОРНЫХ МАШИН | 1972 |
|
SU360464A1 |
| Механизм подачи горной машины | 1989 |
|
SU1691520A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ УСТАНОВКИ С КАЧАЮЩЕЙСЯ ЧАСТЬЮ | 2015 |
|
RU2629763C2 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Манипулятор для установки элементов крепи | 1978 |
|
SU877046A1 |
| Устройство для регулирования положения исполнительного органа горной машины | 1987 |
|
SU1461910A1 |
| Гидросистема секции механизированной крепи | 1991 |
|
SU1800052A1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2003 |
|
RU2235885C1 |
| Устройство для подачи горнопроходческих машин | 1979 |
|
SU857480A1 |
МЕХАНИЗМ ПОДАЧИ ГОРНОЙ МАШИНЫ ПО НАПРАВЛЯЮЩЕЙ, включающий корпус с размещенными в нем захватами, шарнирно связанными с гидродомкратами, отличающийся тем, что, с целыа повышения надежности сцепления захвата с направляющей независимо от направления подачи, он снабжен дополнительными гидродомкратами двойного Действия, а захваты выполнены в виде бащмака с размещенными в нем ступенчатыми клиньями, при этом каждый дополнительный гидродомкрат щарнирно связан со ступенчатыми клиньями и расположен параллельно направляющей. фаеЛ /V/W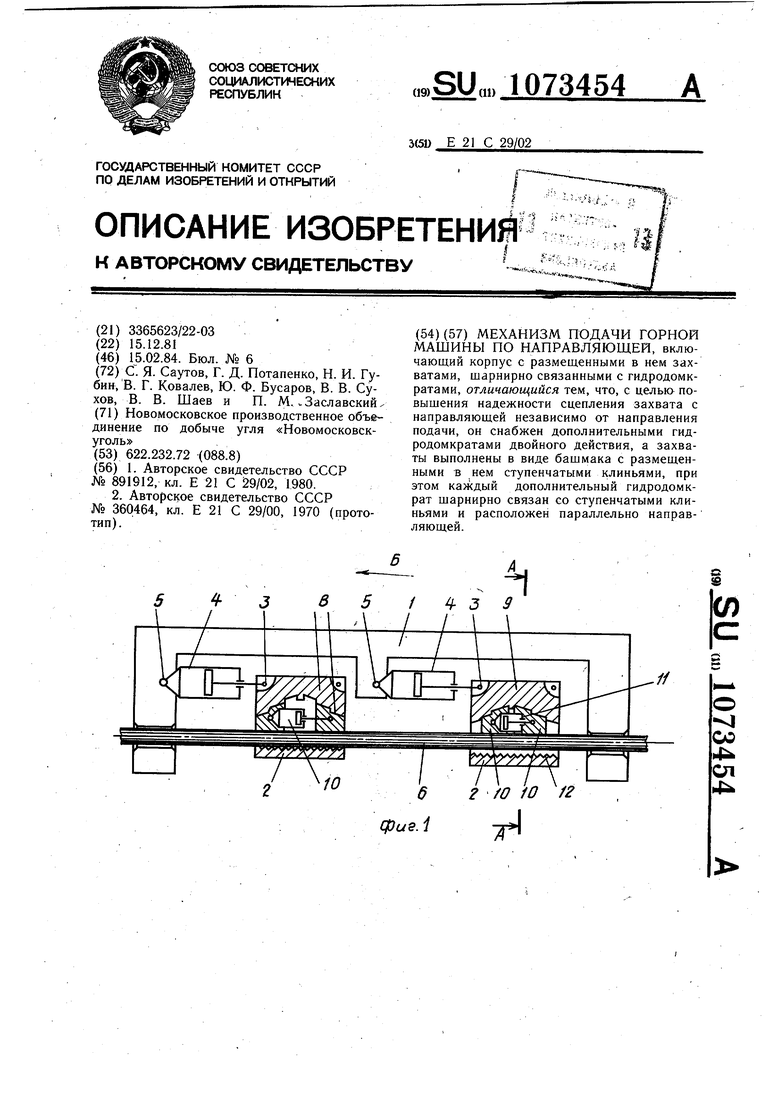
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм подачи очистного комбайна | 1980 |
|
SU891912A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕХАНИЗМ ПОДАЧИ ГОРНЫХ МАШИН | 0 |
|
SU360464A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
