Изобретение относится к горной промышленности, а именно к механизированным крепям с дистанционным управлением.
Цель изобретения - повышение надежности и безопасности работы крепи путем обеспечения двухстороннего управления передвижением ее секций.
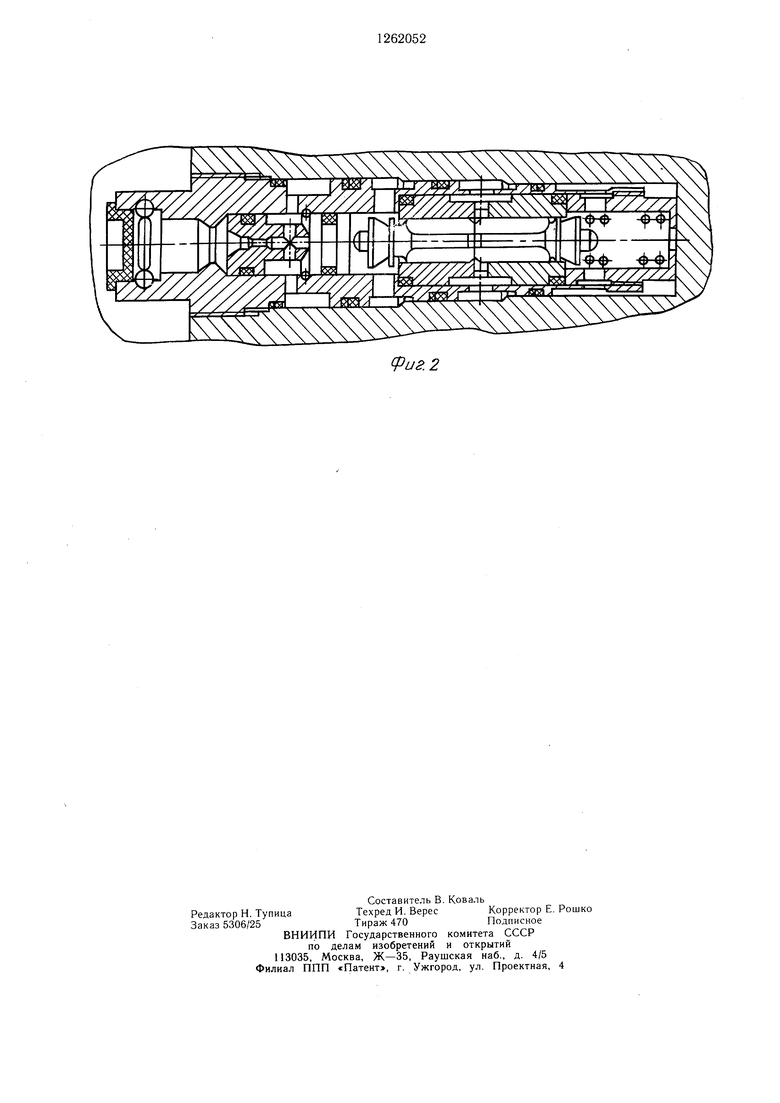
На фиг. 1 представлена гидравлическая схема механизированной крепи с дистанционным управлением: на фиг. 2 - исполнительный распределитель, разрез.
Механизированная крепь с дистанционным управлением содержит секции 1, II и 1П, каждая из которых вк тючает гидростойки 1-4, гидродомкрат 5 перемешения, командный и исполнительный распределители 6 и 7 соответственно. Командный и исполнительный распределители 6 и 7 подключены тидролиниями 8 и 9 к напорной и сливной магистралям 10 и 11, при этом в гидролинии 9, сообш.ающей сливную магистраль 11 с распределителями б и 7, установлен обратный клапан 12, обеспечивающий проход рабочей среды от распределителей 6 и 7 к сливной магистрали 11. Командный распределитель 6 соединен гидролиниями 13 и 14 через основные логические элементы ИЛИ 15 и 16 со штоковыми полостями 17 гидростоек 1-4 смежной (правой) секции, а гидролиниями 21 и 22 через дополнительные логические элементы ИЛИ 23 и 24 - с поршневыми полостями 25-28 этих же гидростоек и гидролинией 29 через логический элемент 30 - с поршневой полостью 31 гидродомкрата 5 своей секции . Кроме того, командный распределитель б соединен гидролинией 32 с дополнительными логическими элементами ИЛИ 23 и 24 смежной (левой) секции, а дополнительной гидролинией 33 с исполнительным распределителем 7 смежной (левой) секции.
Исполнительный распределитель 7 выполнен с полостями 34 и 35 управления, при этом последние сообщены друг с другом через дроссель 36, а полость 34 сообщена дополнительной гидролинией 37 с командным распределителем б смежной (правой) секции. Полость 35 управления сообщена гидролинией 38 с командным распределителем б смежной (левой) секции. Кроме того, исполнительный распределитель 7 сообщен гидролинией 39 со штоковой полостью 40 Гидродомкрата 5 и через установленные параллельно дроссель 41 и обратный клапан 42 - с основными логическими элементами ИЛИ 15 и 16 своей секции крепи. Ири этом поршневая полость 31 гидродомкрата 5 сообщена гидролинией 43 с выходом обратного клапана 12., т.е. со сливной магистралью 11.
Механизированная крепь с дистанционным управлением работает следующим образом.
В исходном положении командный распределитель 6 находится в нейтральном положении и отключен от напорной магистрали 10.
При подаче управляющего сигнала через распределитель б левой секции I крепи давление подается по гидролинии 38 к распределителю 7 центральной секции II, который, переключаясь, сообщает напорную магистраль 10 с гидролинией 39 и через основные логические элементы ИЛИ 15 и 16 - с полостями 17-20 гидростоек 1-4 секции II и полостью 40 гидродомкрата 5 той же секции II. При этом последний складывается, а гидростойки 1-4 разгружаются с небольшим опусканием, величина которого зависит от сопротивления дросселя 41. Рабочая среда из поршневых полостей 25- 28 через дополнительные логические элементы ИЛИ 23 и 24 поступает к распределителю 6 левой секции I, который сообщен своей гидролинией 9 через обратный клапан 12 со сливной магистралью 11. Секция II (цетральная) разгружается. Одновременно рабочая среда из полости 31 гидродомкрата 5 через логический элемент ИЛИ 30 поступает в сливную магистраль 11, происходит перемеш,ение центральной секции П. По окончании операции распределитель 6 секции I переключается в позицию «распор, при которой магистраль 10 сообщается с гидролинией 22, рабочая среда через дополнительные логические элементы ИЛИ 23 и 24 поступает в полости 25-28 гидростоек 1-4 секции И, осуществляя ее распор. Затем распределитель 6 секции I возвращается в нейтральное исходное положение.
При челноковой работе выемочной машины (не показана) необходимо осуществлять управление в обе стороны. В этом случае сигнал на управление секцией II (центральной) подается от командного распределителя 6 секции III, при этом работа секции П осуществляется аналогично описанному.
Дроссель 36, сообщающий полости 34 и 35 управления распределителя 7, служит для оперативного отключения последнего и его установки в исхОхЗ,ное положение.
Фронтальная выдвижка осуществляется реверсом потока рабочей среды в магистралях 10 и 11 либо одновременным их включением (подача рабочей среды под давлением) при дифференциальной схеме выдвижки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
| Гидросистема механизированной крепи для пластов наклонного падения | 1989 |
|
SU1681015A1 |
| Гидросистема механизированной крепи | 1986 |
|
SU1435796A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДОЛИНСКОГО МКД, СИСТЕМА УПРАВЛЕНИЯ КРЕПЬЮ, МЕЖСЕКЦИОННАЯ ЗАТЯЖКА КРЕПИ, ГИДРОСИСТЕМА КРЕПИ | 1999 |
|
RU2181842C2 |
| Пульт дистанционного управления угледобывающим агрегатом | 1988 |
|
SU1573202A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
| Устройство обеспечения подпора | 1975 |
|
SU746121A1 |
| Гидравлическое распределительное устройство секции механизированной крепи | 1982 |
|
SU1129374A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
МЕХАНИЗИРОВАННАЯ КРЕПЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ, содержащая секции, каждая из которых включает гидростойки и гидродомкраты перемещения, управляемые комаидный и исполнительный распределители, подключенные гидролиниями к магистралям нагнетания, слива и поршневым и штоковым полостям гидродомкратов перемещения и гидростоек, логические элементы ИЛИ и обратные клапаны, причем каждый командный распределитель сообщен гидролинией с исполнительным распределителем смежной секции крепи, отличающаяся тем, что, с целью повышения надежности и безопасности работы, каждая секция снабжена дополнительными логическими элементами ИЛИ, которые подключены к командному распределителю данной секции и поршневым полостям гидростоек смежной секции крепи, исполнительный распределитель выполнен с дополнительной полостью управления, сообщенной с командным распределителем смежной секции, и через дроссель - с основной полостью управления, обратный клапан установлен в гидролинии, одновременно сообщающей командный и исполнительный распределители с магистралью слива, при этом его вход подключен к распределителям, а выход - к магистрали слива и одному из входов основного логического элемента ИЛИ, второй вход которого подключен к командному распределителю, а выход - к поршневой полости гидродомкрата своей секции. N5 О5 Ю О ел to
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
