301 18 302 303
i
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1472692A1 |
| Пульт дистанционного управления угледобывающим агрегатом | 1989 |
|
SU1652602A2 |
| Гидравлическая система дистанционного управления секциями крепи угледобывающего агрегата | 1988 |
|
SU1703827A1 |
| Система гидравлического дистанционного управления угледобывающим агрегатом | 1987 |
|
SU1528925A1 |
| Гидравлическая система | 1990 |
|
SU1796771A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Система гидравлического управления секцией крепи угледобывающего агрегата | 1976 |
|
SU615231A1 |
| Двухканальная система управления механизированной крепью | 1989 |
|
SU1710771A1 |
| Гидравлическая система группового управления секциями шахтной крепи | 1978 |
|
SU752037A1 |
| Способ поддержания очистного забоя и секция механизированной крепи для его осуществления | 1987 |
|
SU1518534A1 |
Изобретение относится к горной промышленности и предназначено для дистанционного управления угледобывающим агрегатом с базой и секциями крепи. Цель - повышение эффективности управления работой агрегата на наклонных пластах за счет удержания его от сползания. Пульт дистанционного управления угледобывающим агрегатом включает распределители (Р) 10,1,10,2, 10.3 передвижки секций крепи, выходы которых соединены гидролиниями (ГЛ) 20, 21, 22 с гидродомкратами и гидростойками через блоки управления секциями, Р 12 передвижки базы и Р 11 распора. Камеры управления р 10.1, 10,2, 10.3 соединены ГЛ 16.1, 16.2, 16.3 с выходами соответствующих элементов "Память" 15.1, 15.2, 15.3. Одни входы последних ГЛ 17.1, 17.2, 17.3 соединены с соответствующими выходами командного устройства 9, а вторые входы элементов "Память" ГЛ 18 подсоединены через реле давления 14 к линии распора 19. Силовой Р 12 передвижки базы соединен с ГЛ 7 напора и слива 8, его камера управления - с программным устройством 9, а выход ГЛ подачи базы 28 - с гидродомкратами через блоки. При возрастании давления в ГЛ 19 до величины настройки реле давления 14 сигнал поступает в ГЛ 18 на вход элементов "Память" 15.1, 15.2, 15.3 (в нашем случае к толкателям гидрозамков 30,1, 30.2, 30.3), сбрасывая давление в линиях 16.1, 16.2.16.3, и р 11 возвращаются в исходное положение. Давление в ГЛ 20 падает и снижается нагрузка на гидродомкратах 4 передвинутой и зафиксированной группы 1 секций крепи. Подобным образом осуществляется передвижка группы II, III секций. 2 ил.
Сл 1
СО
ролиниями (ГЛ) 20, 21, 22 с гидродомкратами и гидростойками через блоки управления секциями, Р 12 передвижки базы и Р 11 распора. Камеры управления Р 10.1, 10.2, 10.3 соединены ГЛ
12 передвижки базы соединен с ГЛ 7 напора и слива 8, его камера управления - с программным 9,
Изобретение относится к горной промышленности и предназначено для дистанционного управления угледо- бывающим агрегатом с базой и секциями крепи.
Цель изобретения - повышение эффективности управления работой агрегата на наклонных пластах за счет удержания его от сползания.
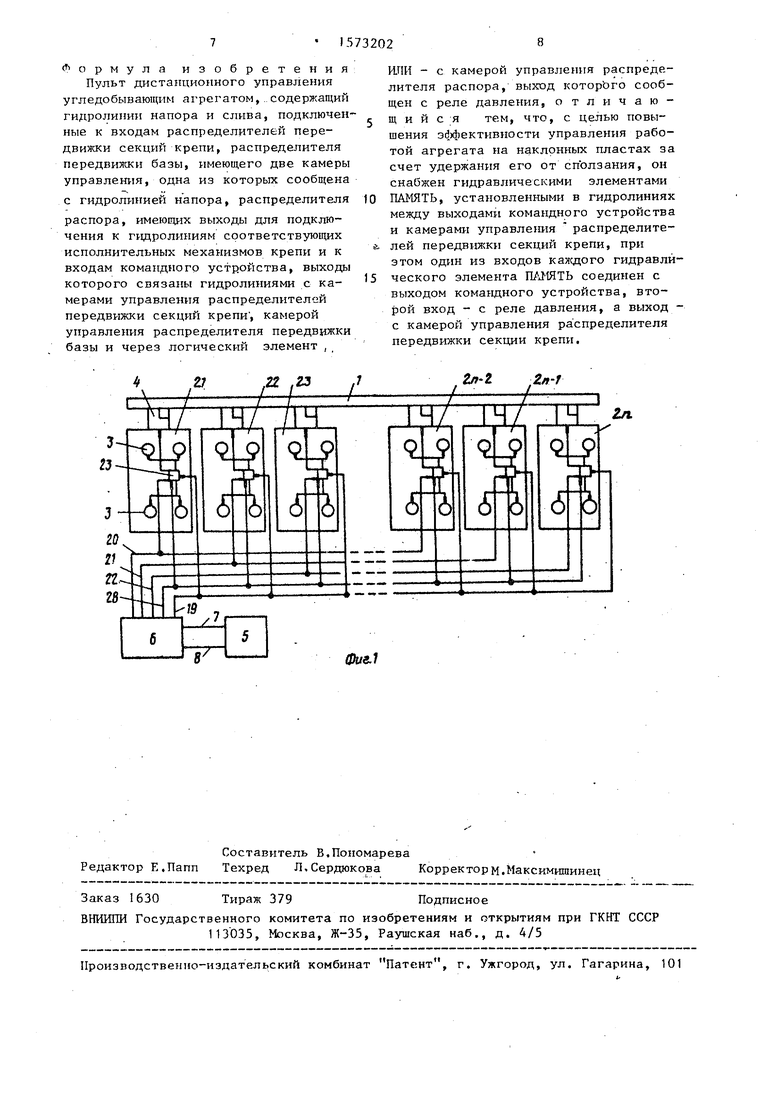
На фиг.1 изображена структурная схема гидравлической системы управления угледобывающим агрегатом; на фиг.2 - принципиальная гидравлическа схема пульта управления.
Гидравлическая система дистанционного управления угледобывающим агрегатом с фронтально-передвигаемой базой 1, секциями 2.1, 2.2, 2.3, ,.., 2.п крепи, образующими три группы при передвижке (например, группа I - секции 2.1, 2.4, 2.п - 2, группа II секции 2.2, 2,5, 2.п - 1; группа III - секции 2.3, 2,6, 2.п), включающими двухполостные гидростойки 3 и двухполостные гидродомкраты 4 передвижки крепи и базы 1, содержит насосную станцию 5, пульт 6 управления соединенный с насосной станцией 5 гидролиниями напора 7 и слива 8.
Пульт 6 управления (фиг-2) содержит командное программное устройство 9, силовые распределители 10.1 - 10, передвижки секций крепи, силовые распределители распора 11, подачи базы 12, логический гндроэлемент ИЛИ 13, реле 14 давления,, а также гидравлические элементы ПАМЯТЬ 15.1-15.3
а выход ГЛ подачи базы 28 с гндро- домкратами через блрки. При,возрастании давления в ГЛ 19 до величины настройки реле 14 давления сигнал поступает в ГЛ 18 на вход элементов ПАМЯТЬ 15.1, 15.2, 15.3 (в нашем случае к толкателям гидрозамков 30.1, 30.2, 30.3), сбрасывая давление в линиях 16.1, 16.2, 16,3, и Р 11 возвращаются в исходное положение. Давление в ГЛ 20 падает и снижается нагрузка на гидродомкратах 4 передвинутой и зафиксированной группы I секций крепи. Подобным образом осуществляется передвижка групп II, III секций, 2 ил.
Камеры управления силовых распределителей 10.1-10.3{передвижки секций крепи соединены гидролияними 16.1- 16.3 с выходами соответствующих элементов ПАМЯТЬ 15.1-15.3. Одни входы последних гидролиниями 17.1-17.3 соединены с соответствующими выходами командного устройства 9, а вторые входы элементов ПАМЯТЬ гидролинией 18 подсоединены через реле 14 давления к линии 19 распора.
Выходы силовых гидрораспределителей 10.1-10,3 передвижки секций крепи соединены гидролиниями 20-22 с гидродомкратами 4 и гидростойками 3 через блоки 23 управления секциями. Одни входы данных распределителей сообщены линиями 24.1-24,3 с гидролинией 7 напора, другие входы гидролиниями 25.1-25.3 сообщены с гидролинией 8 слива.
Силовой гидрораспределитель 11 распора имеет две камеры 26 управления, одна из которых соединена с гидролинией 7 напора, другая через логический элемент «ИЛИ 13 линией 27 - с командным программным устройством 9, входы этого распределителя сообщены с гидролиниями напора 7 и слива 8, выход - гидролинией распора 19 с гидростойками 3 через блоки 23 всех
секций 2.1, 2.2,
Силовой гидрораспределитель 12 соединен- с гидролиниями напора 7 и слива 8, его камера управления - с программным устройством 9, а выход гидролинией 28 подачи базы с гидроций крепи.
Гидравлические элементы ПАМЯТЬ 15,1-15.3 могут быть выполнены в. виде гидравлических замков с обратными клапанами 29.1-29.3 и толкателями 30.1-30.3.
На фиг.2 в командном распределитель I оператор переключает командное устройство в следующую позицию Р. В этом случае линия 17,1 соединяется со сливной линией 8, обратный клапан
Система работает следуюпдам образом. как сигнал на элемгнте ИЛИ 13 изчеВ исходном положении все силовые распределители, кроме распределителя 11, выключены, гидролинии 20, 22 и 28 соединены со сливом.
Под давлением рабочей жидкости в камере 26 управления силовой гидрораспределитель 11 включен и рабочая жидкость под давлением поступает в гидролинию 19, оттуда в гидростойки 3 крепи, обеспечивая их распор.
Подача базы агрегата на забой осуществляется включением через программное устройство 9 силового гидрораспределителя 12, рабочая жидкость
поступает при этом из гидролинии 7
напора в гидролинию 28 подачи базы, a 3Q g на вход элементов ПАМЯТЬ 15.1 - затем в гидродомкраты 4 агрегата, 15.3 (в данном случае к толкателям обеспечивая перемещение базы.
15 зает (давление сброшено в линии 17.1) падает давление в линии. 27 и камере управления распределителя 11, последний возвращается в исходное состояние, соединяя линию 19 с напорной
2о линией 7. Все гидростойки крепи подключаются к напору, давление в них поступает1 из линии 19 через блок 23 управления секцией в поршневые полости гидростоек и они распираются.
25 Передвинутые секции оказываются в зафиксированном положении. При возрастании давления в линии 19 до величины настройки реле 14 давления сигнал от последнего поступает в линию
Для передвижки одной из групп крепи командное программна устройство 9 устанавливают в одно из положений УП1, УП2 и УПЗ.
Давление из напорной линии 7 через командное устройство 9 по линии 17.1 поступает к элементу ПАМЯТЬ - гидрозамок 15.1, через его обратный клапан 29.1 по линии 16.1 в камеру управления распределителей 10.1 и переключает его, давление из напорной магистрали 7 по линии 24.1 поступает в главную гидромагистраль 20 к сек- циям крепи группы I, через блоки 23 управления секциями крепи в гидродомкраты 4. Одновременно с этим сигнал от командного устройства 9 по линии 17,1 через элемент ИЛИ 13 по линии
27 поступает в камеру управления распределителя 11, переключает его и гидромагистраль 19 соединяется со сливной линией 8 (возможно соединение при необходимости, с гидролинией подпора вместо слива, на фиг.2 не пока- зано), поршневые полости гидростоек 3 секций крепи группы I разгружаются и передвигаются гидродомкратами 4,
ль I оператор переключает командное устройство в следующую позицию Р. В этом случае линия 17,1 соединяется со сливной линией 8, обратный клапан
g на вход элементов ПАМЯТЬ 15.1 - 15.3 (в данном случае к толкателям
зает (давление сброшено в линии 17.1), падает давление в линии. 27 и камере управления распределителя 11, последний возвращается в исходное состояние, соединяя линию 19 с напорной
линией 7. Все гидростойки крепи подключаются к напору, давление в них поступает1 из линии 19 через блок 23 управления секцией в поршневые полости гидростоек и они распираются.
Передвинутые секции оказываются в зафиксированном положении. При возрастании давления в линии 19 до величины настройки реле 14 давления сигнал от последнего поступает в линию
3Q g на вход элементов ПАМЯТЬ 15.1 - 15.3 (в данном случае к толкателям
5 включены распределители 10,2 или 10.3, то и названные) возвращается в исходное положение. Давпение в линии 20 падает и снимается нагрузка на гидродомкратах 4 передвинутой и
о зафиксированной группы I секций крепи. Аналогичным образом осуществляется передвижка крепи групп II и III.
Технико-экономические преимущества предлагаемого устройства - повы5 шение эффективности работы агрегата при его работе на наклонных пластах, что .достигается наличием в системе гидравлических элементов ПАМЯТЬ, которые обеспечивают поддержание давления в рабочих полостях гидродомкратов передвижения до момента повышения давления в рабочих полостях гидростоек передвинутой крепи (до величины начального распора) тем самым обеспечивается надежная фиксация крепи в боковых породах и пить после этого снимается давление в гидросистеме передвижки крепи.
0
Формула изобретения
Пульт дистанционного управления угледобывающим агрегатом, содержащий гидролинин напора и слива, подключенные к входам распределителей передвижки секций крепи, распределителя передвижки базы, имеющего две камеры управления, одна из которых сообщена
с гидролинией напора, распределителя распора, имеющих выходы для подключения к гидролиниям соответствующих исполнительных механизмов крепи и к входам командного устройства, выходы которого связаны гидролиниями с камерами управления распределителей передвижки секций крепи , камерой управления распределителя передвижки базы и через логический элемент ,
ИЛИ - с камерой управления распределителя распора, выход которого сообщен с реле давления, отличающ и и с я тем, что, с целью повышения эффективности управления работой агрегата на наклонных пластах за счет удержания его от сползания, он снабжен гидравлическими элементами
ПАМЯТЬ, установленными в гидролиниях между выходами командного устройства и камерами управления распределите- лей передвижки секций крепи, при
этом один из входов каждого гидравли5 ческого элемента ПАМЯТЬ соединен с выходом командного устройства, второй вход - с реле давления, а выход - с камерой управления распределителя передвижки секции крепи.
| Гидросистема управления секциями крепи | 1985 |
|
SU1289997A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
