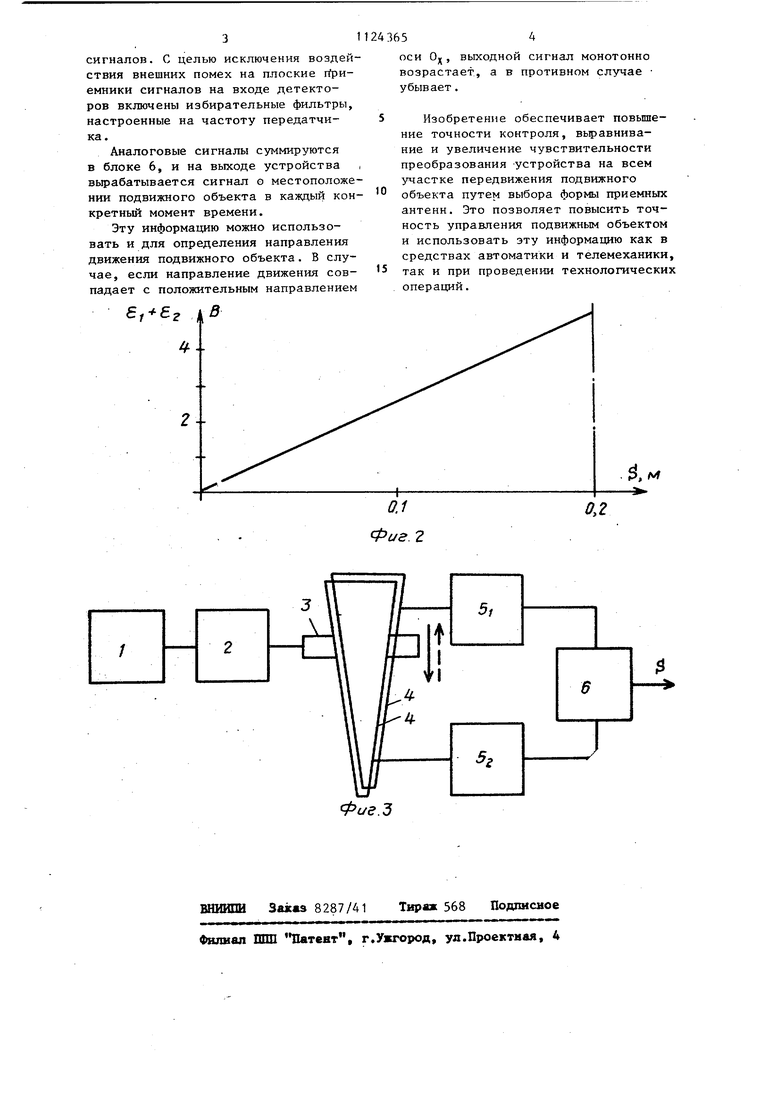
.1 Изобретение относится к области телеуправления транспортными средствами и может быть применено на железнодорожном и промышленном тран спорте, а также на объектах со взаимоперемещающимися частями на фиксированном участке передвижения. Известно устройство контроля местоположения подвижного объекта, использованное для дуплексной связи между подвижным объектом и пунктом управления, при котором контроль и управление подвижным объектом про изводят по сигналам путевых датчиков, наводи в м в дополнительных при емных рамках, установленных в фикси рованных положениях подвижного объекта М. Наиболее близким по технической сущности к предложенному является устройство для контроля местоположе ния подвижного объекта при измерени его скорости, содержащее генератор усилитель и расположенные в зоне перемещения передающую антенну, две приемные антенны, выполненные в виде совмещенных рамочных контуров треугольной формы, расположеннью встречно по отношению друг к другу, и два измерительных канала, выполненных на детекторах с приемными антеннами на входах 2j , Недостатком известного устройства является зависимость выходного сигнала от зазора между передающими и приемными антеннами, а следовательно, от случайного изменения амплитуды и мощности сигналов с пе редающей антенны и вибрации при передвижении подвижного объекта,что снижает точность контроля. Цель изобретения - повышение точности контроля местоположения подвижного объекта. Поставленная цель достигается тем, что в устройство для контроля местоположения подвижного объекта, содержащее последовательно соединенные генератор, усилитель и расположенные в зоне перемещения передающую антенну, две приемные антенны, каждая из которых подключена к входу соответствующего детектора, введен .сумматор аналоговых сигналов входы которого соединены с выходами соответствующих детекторов, а выход соединен с выходом устройства 652 Кроме того, две приемные антенны выполнены в виде рамочных контуров клинообразной формы, сужающихся к началу зоны перемещения и расположенных в параллельных плоскостях, между которыми помещена передающая антенна прямоугольной формы. На фиг.1 изображена конструкция приемных антенн; на фиг.2 - выходная статическая характеристика устройства; на фиг.З - функциональная схема устройства. Две идентичных и конгруэнтных по форме приемные антенны (фиг.1) разнесены в пространстве и расположены друг под другом в параллельных плоскостях. ЭДС, возбуждаемая в каждой из них при перемещении передакндей антенны между приемными антеннами вдоль оси 0, пропорциональна относительному расположению передающей антенны между приемными и координате передающей антенны.Однако суммарный сигнал ЭДС (фиг.2) линейно зависит только от координаты передающей антенны и не зависит от относительного расположения приемопередакяцих антенн. Устройство (фиг.З) содержит последовательно соединенные генератор 1, усилитель 2 и передающую антенну 3 прямоугольной формы, две идентичные и конгруэнтные по форме, разнесенные в пространстве и расположенные друг под другом в параллельных плоскостях приемные антенны 4, два детектора 5 и Sg и сумматор 6 аналоговых сигналов. Устройство работает следующим образом. При перемещении подвижного объекта в каждой из приемных антенн 4 возбуждаются одни и те же по частоте и амплитуде сигналы в том случае, когда передающая антенна расположена симметрично относительно двух приемных. В противном случае наблюдается увеличение амплитуды сигнала в одном и уменьшение в другом на значения, равные по величине, но обратные по знаку. Поэтому сигнал суммы (фиг.2) не зависит от взаимHojro расположения передающей и приемных антенн вдоль оси 0|j (фиг. 1) . Индуцируемые частотные сигналы в измерительных каналах преобразуются в аналоговые сигналы, пропорциональные амплитудам частотных сигналов. С целью исключения воздей ствия внешних помех на плоские гфиемники сигналов на входе детекторов включены избирательные фильтры, настроенные на частоту передатчика. Аналоговые сигналы суммируются в блоке 6, и на выходе устройства вырабатывается сигнал о местоположе нии подвижного объекта в каждый кон кретный момент времени. Эту информацию можно использовать и для определения направления движения подвижного объекта. В случае, если направление движения совпадает с положительным направлением 54 оси 0, выходной сигнал монотонно возрастает, а в противном случае убывает. Изобретение обеспечивает повышение точности контроля, выравнивание и увеличение чувствительности преобразования -устройства на всем участке передвижения подвижного объекта путем выбора формы приемных антенн. Это позволяет повысить точность управления подвижным объектом и использовать эту информацию как в средствах автоматики и телемеханики, так и при проведении технологических операций.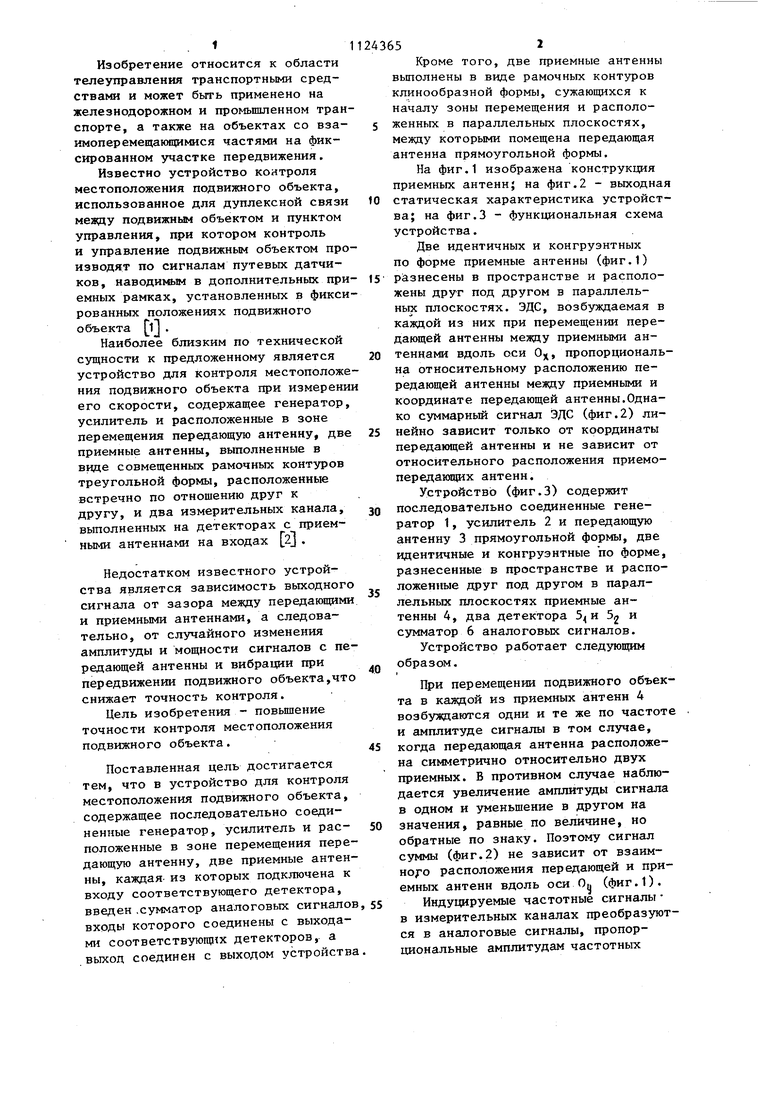
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1160458A1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДЗЕМНЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2233460C1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Устройство для контроля перемещения и местоположения транспортного средства | 1982 |
|
SU1237532A1 |
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |
| Устройство для определения номера и направления движения объекта | 1988 |
|
SU1541652A1 |
| СИСТЕМА МЕСТООПРЕДЕЛЕНИЯ И ДИСПЕТЧЕРИЗАЦИИ МОБИЛЬНЫХ БРИГАД СКОРОЙ ПОМОЩИ | 2004 |
|
RU2278418C2 |
| Устройство для контроля линейных перемещений | 1984 |
|
SU1288737A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1324048A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА, содержащее последовательно соединенные генератор, усилитель и расположенные в зоне перемещения передающую антенну, две приемные антенны. каждая из которых подключена к входу соответствующего детектора, отличающееся тем, что, с целью повьвиення точности, в устройство введен сумматор аналоговых сигналов, входы которого соединены с выходами соответствующих детекторов, а выход соединен с выходом устройства. 2. Устройство по п.1, о т л ичающееся тем, что две Приемные антенны вьшолнены в виде рамочных контуров клинообразной формы, сужающихся к наналу зоны перемещения и расположенных в параллельных I плоскостях, между которыми помещена передающая антенна прямоугольной формы. Ю i4 СО Од ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ДУПЛЕКСНОЙ связиМЕЖДУ подвижным | 0 |
|
SU307416A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ бесконтактного измерения скоростипОдВижНОгО Об'ЕКТА и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1978 |
|
SU823204A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
