«йг мимяпвг
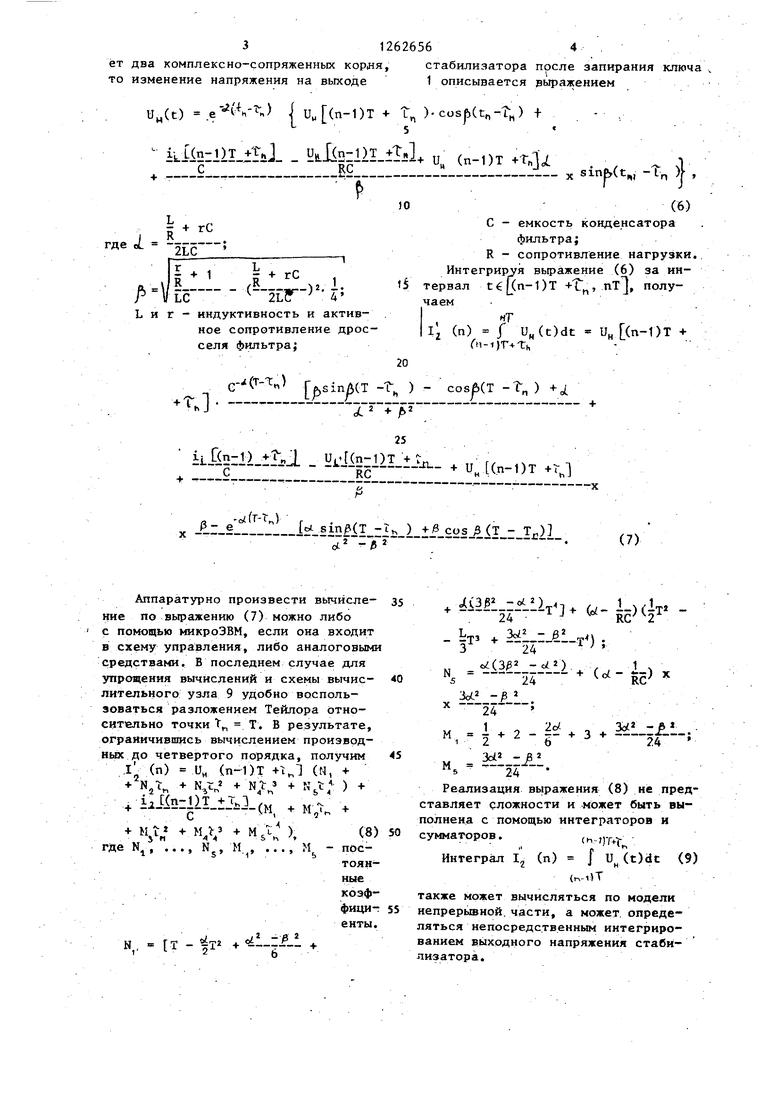
pue.f Изобретение относится к электротехнике, а именно к преобразовательной технике, и может быть использова но при построении импульсных преобразователей постоянного напряжения в постоянное и постоянного напряжения в переменное. Такие преобразователи широко применяют в автоматике, электроприводе, в радиоэлектроникеj и других областях техники. Целью изобретения является улучше ние качества выходного напряжения преобразователей при действии входных возмущений за счет организации управления, компенсирующего влияние этих возмущений. Сущность предлагаемого изобретени рассмотрим на примере управления импу сным стабилизатором постоянного напря жения с последовательным ключом. На фиг. 1 приведена функциональная схема стабилизатора напряжения; на .фиг. 2 - временные диаграммы, поясняющие работу стабилизатора; на фиг. 3 - пример реализации вычис лительного узла. Силовая часть стабилизатора включает в себя ключ 1, замыкающий диод ,2, сглаживающий фильтр, состоящий из дросселя 3 и конденсатора 4, и нагрузку 5. Устройство управления содержит интегратор 6, сравнивающий элемент сумматор 8, вычислительный узел 9, блок 10 умножения, сумматор 11, фор рователь 12, генератор 13 тактовых импульсов, датчик 14 тока дросселя, датчик 15 напряжения на выходе и да чик 16 падения напряжения на импуль ном преобразователе (дросселе). Вхо интегратора 6 подключен к входу фильтра. Входы вычислительного узла 9 подключены к выходам датчиков 14 и 15. К прямым входам сумматора 11 подключены выходы вычислительного узла 9 и датчика 16, к его инверсно му подключен выход интегратор 6.Вход формирователя 12 подключен К входу стабилизатора, а его выход к входу блока 10, к.другому входу которого подключен выход сумматора 11. Выходы блока 10 -и интегратора 6 подключены к входам сумматора 8. Выход сумматора 11 подключен к одно му из входов сравнивающего элемента 7,к другому входу которого подключен выход генератора 13. Выход гене атора 13 подключен также к устаноочному входу интегратора 6. Выход равнивающего элемента 7 подключен управляющему входу ключа 1. Стабилизатор работает следующим бразом. В начале каждого п-го периода одуляции с генератора 13 поступает мпульс, переводящий сравнивающий элемент 7 в состояние, соответствуюее отпиранию ключа 1. Ключ 1 подклюает напряжение питания U к фильтру с нагрузкой и к входу интегратора 6. На выходе интегратора, предварительно приведенного в исходное состояние с нулевым выходным напряжением (например, импульсом с генератора 13), начинает формироваться напряжение (rv-i;T+th I, (tj JUf,(t)dt, Uf, - напряжение на входе фильтра; (п-1)Т - время, отсчитываемое от начала п-го периода. Вьгчислительный узел 9 определяет значение интеграла от выходного напряжения за текупщй период модуляции) S и (t)dt. (n-i)T Закон изменения Uц(t) в течение периода зависит как от закона изменения напряжения U, так и от длительности интервала открытого состояния ключа 1 th . При произвольном характере изменения U вычислить значение интеграла Ii(n) до того, как сформирован интервал Т,, невозможно. Это усугубляется еще и тем, что сам интервал Tf, зависит от U. Однако нетрудно вычислить значение I;, в любой момент времени, если предположить, что в этот момент ключ 1 запирается. После запирания ключа 1 процессы в непрерывной части стабилизатора определяются только параметрами непрерывной части и значениями токов и напряжений в момент запирания ключа 1. В частности, если нагрузка стабилизатора активная и постоянная, а характеристическое уравнение, соответствующее непрерывной части, имеётто где L и
kliKlLiM . i..Jfs-.n.i.; .„, 1
-oi(r-t)
-t ) -нЭсоз ЗСт - Т,,),.
312626564 . два комплексно-сопряженных корля, стабилизатора после запирания ключа изменение напряжения на выходе 1 описывается рьфажением .) I и„(п-1)Т + t ).cos|i() + - ., k Iil-ilU - yLl(). u, (n-1)T .Tj . . sinp(t,, -L )j , L ,,С - емкость конденсатора Ji Е;фильтра; 2LC .R - сопротивление нагрузки. Jr . 1: . J.QИнтегрируя выражение (6) за инRД Ч2, 1. тервал t€f(n-1)T +1.,, nil, полуГг 9Т А -« LU /ьь 4 чаем г - индуктивность и активное сопротивление дросселя фильтра;Cn-ijr+th .20 е-( ) - cos6(T -Г ) , .---..;45 , 50(6) 1 (п) f U(c)dt и„ (n-1)T + dC А 25


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления импульсным стабилизатором среднего значения выходной переменной с последовательно включенными силовым ключом и непрерывной частью | 1984 |
|
SU1238046A1 |
| Способ управления импульсным преобразователем напряжения | 1989 |
|
SU1746369A1 |
| Импульсный преобразователь напряжения | 1989 |
|
SU1677699A1 |
| Компенсационно-параметрический импульсный стабилизатор постоянного напряжения | 1976 |
|
SU657422A1 |
| Способ стабилизации постоянного напряжения импульсного многозвенного стабилизатора | 1988 |
|
SU1529200A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| Стабилизатор среднего значения постоянного напряжения | 1985 |
|
SU1335952A1 |
| Параметрический импульсный стабилизатор постоянного напряжения | 1980 |
|
SU935929A1 |
| Аналого-цифровой интегратор | 1979 |
|
SU842868A1 |
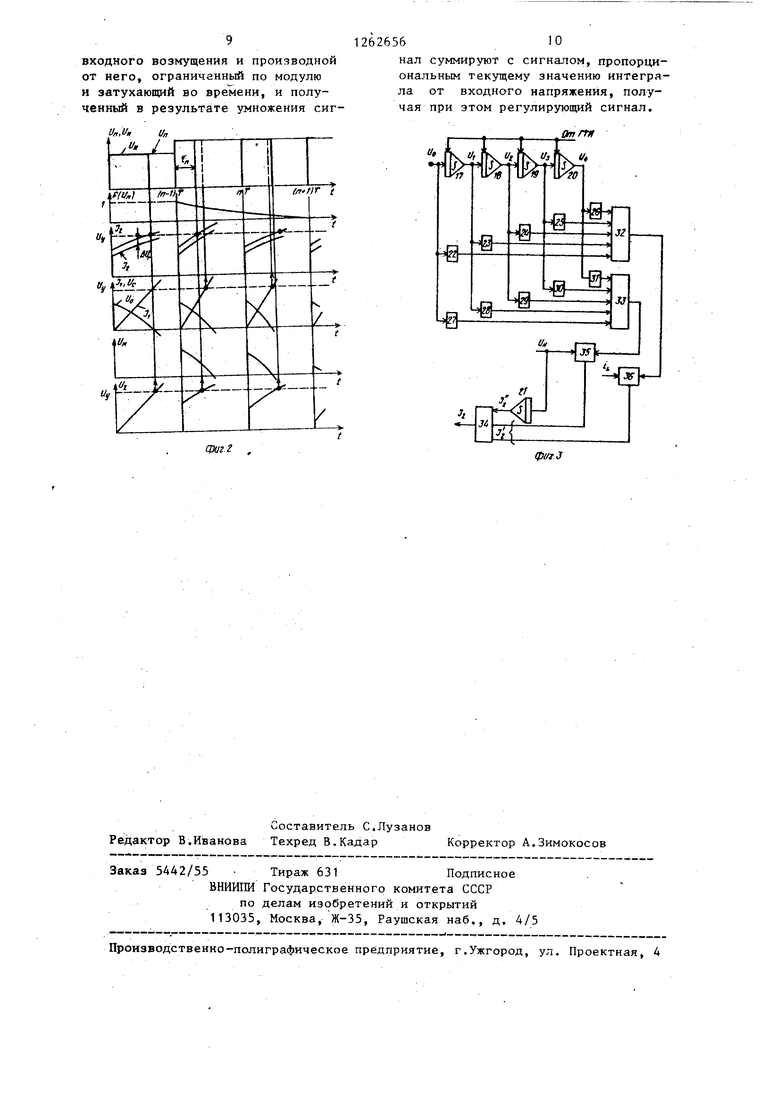
Изобретение относится к преобразовательной технике и может быть использовано для управления преобразователями постоянного напряжения. Целью изобретения является улучшение качества выходного напряжения. В начале каждого периода модуляции с генератора 13 поступает импульс, переводящий сравнивающий элемент 7 в состояние, соответствующее отпиранию ключа 1. Вычислительный узел 9 определяет значение интеграла от выходного напряжения за текущий период модуляции. Датчик 16 измеряет среднее значение падения напряжения на дросселе 3 фильтра, a формирователь 12 формирует функцию, характеризующую интенсивность воздействия возмущения на стабилизатор. Выходное напряжение блока 10 умножения суммируется с напряжением интегратора 6 с 9 и полученная сумма подается на вход сравнивающего элемента 7. Когда нат пряжение на его -выходе достигает значения напряжения управления ключ 1 запирается. Далее повторяется. 3 ил. tsp Ь s Р1 Р5
Аппаратурно произвести вычисле-35 кие по вьфажению (7) можно либо с помощью микроэвм, если она входит в схему управления, либо аналоговыми средствами. В последнем случае для упрощения вычислений и схемы вычис- 0 лительного узла 9 удобно воспользеваться разложением Тейлора отноеитвльно точки Т Т. В результате, ограничившись вычислением проиэврдных до четвертого порядка, получим45 .iV (n) и„ (n-1)T +г,Т (N, + Njt + , iiJi2il).,., м7 + С -ь M,V -« MS ), (8)50 где N.N, М , ..., М - пос S 1 ь ные коэффициг55енты. Ы rj ij2 .,. . 6 Д(3)В2 -ы)-, . . 24 RC 2 L-, 3of - 0 „4 3 24 (3 -с/) , 1 -. s 24 RC Зб(. 24 1 2о 3ot - . i 2 Ъ 24 3ot J3 5 24 Реализация выражения (8) не представляет сложности и может быть выполнен.а с помощью интеграторов и сумматоров. ,,.. , Р . ... Интеграл 1 (п) J U (t)dt (9) (n-i)T также может вычисляться по модели непрерывной, части, а может определяться непосредственным интегрированием выходного напряжения стабнлизатора.
I,(n)
Обвщй интеграл
определяется как сумма
I, п) и 1, (п).
Схема вычислительного узла 9, реализукицая выражения (8) и (9), содержит интеграторы 17-21, делители 22-31 напрйжения, сумматоры 3234 и блоки 35 и 36 умножения (фиг 5 При последовательном интегрировании постоянного напряжения получем напряжения:
и,. (CH) ,
A,t,
и,
u,(tj
-А г
A,t , и.
S -
Здесь А, ..., ,А - коэффициенты, зависйщие от значенид Uo и от постоянных интегрирования интеграторов.
Выбором коэффициентов передачи делителей 22-31 напряжения K,-Kj и к,| -К производится согласование коэффициентов Nj-N,; , с напряжением Uo и коэффициентами . При необходимости вводятся инверторы, В исходное состояние интеграторы приводятся импульсом с генератора 13
Датчик 16 измеряет среднее значение падения напряжения на дросселе 3 фильтра
uU; (п) I, (п). г т, которое пpoпoplц oнaльнo среднему значению тока дросселя 3. Если нагрузка стабилизатора постоянна, то можно положить дКр (п) cons с и заменить датчик 16 источником напряжения А и ,
Формирователь 1.2 формирует функцию F(U)-, характеризующую интенсивность воздействия возмущения на стабилизатор. Чем больше величина возмущения и чем больше скорость его изменения, тем больше изменение U . Поэтому функция F(U) может быть СУ1Ф1ОЙ двух составляющих, одна из которых порпорциональна величине возмущения, а вторая - первой производной от возмущения. Можно ввести и вторую производную. Функция F(D) должна быть затухающей и ограниченной по модулю. В простейшем случае формирователь может быть построен на базе схемы, реализующей переда; точную функцию
W(p); --Ij---.
(10)
При скачке входного напряжения и на выходе такой схемы появляется приращение U, которое затем по экспоненте убьшает до нуля. Чтобы функция F(U,) была положительной при любом знаке изменения U, сигнал с выхода указанной схемы и его инверсию следует подать на диодный элемент ИЛИ 2. Ограничить величину F(Uj,) можно стабилитронами.
Сумматор 11 определяет раз- . ность между суммарным значением
1,П AU
и значением I
Лс) 1„ (t)
(1
и„
9 (-Блок 10 В аналоговом виде перемножает напряжения на выходах формирователя 12 и сумматора 11,
U(t) U,(t)F(U). (12 Выходное напряжение блока 10 суммируется с выходным напряжением интегратора 6 в сумматоре 8 и полученная сумма
) 1,(С) + U,(t)
подается на вход сравнивающего элемента 7. Когда напряжение U достигает значения напряжения управления Uy, сравнивающий элемент 7-срабатывает и запирает ключ 1. Формирование импульса напряжения О
h
длительностью V закончено. Далее цикл повторяется,
В квазистационарном режиме, когда напряжение U не изменяется и
h
переходные процессы относительно
медленных среднеинтервальных составляющих сигналов закончены,-имеем равенство
и,Сп) Ц(п) -ди, ll,(n), (1
Т
оТ где П (п)
Т j U,(t)dt,
,., (
- (b-i)bt
ч. C) f f ujt)dt,
(b-ir,-,
-U. I,r .|.
. Ha вькоде формирователя 12 F(U) 0, поэтому и (с) О и иДс) I,(t)./
При Uj-(t) Uy, т.е. при t (п-1)Т +t с учетом (4), имеем
(n-iVT-iT.,.
U( и,.
(h-i)T
Тогда и (п) и (п) - U и
и, т.е. в кваз.истационарном режиме обеспечивается независи мость выходного напряжения стабили затора от входного. Схема работает как при известном способе управлени по интегралу от напряжения питания При изменении U функция F(U|) возрастает. Положим, что U возрастает скачком в начале п-го периода и F(U) достигнет единицы. Тогда на выходе.блока 10 имеем U(t) и, (t) ) + д и - I,(t), а на выходе сумматора 8 Uj-(t) + л и. иЛО При t (п-1)Т +Т, , когда ) + д Uy, получаем U откуда I, (с) и, Ли. . При этом среднее значение вькодного напряжения и(п) 1,(п) |и -ли, т.е. такое же, как в квазистационар ном режиме. Таким образом, при действии входных возмущений среднее значение выходного напряжения стабилизатора не изменилось. Поскольку при F(U) 1 регулирование в системе ведется по значению выходного напряжения, то при определенных параметрах непрерывной части она может стать неустойчивой. Однако за счет затухания F(U) обес печивается затухание переходных про цессов в системе, т.е. она сохраняет устойчивость. Конкретный урЬвень ограничения и вид функции F(U) зависят от характеристик непрерывно части. Таким образом, в квазистацирнарном режиме в системе работает канал регулирования по напряжению на вход фильтра, что обеспечивает высокую то« ность компенсации возмущений и высокую устойчивость. В переходных режимах дополнительно подключается канал регулирования по выходному напряжению стабилизатора, что существенно повьшает динамические характеристики стабилизатора. Для сравнения на фиг. 2 пунктиром показаны импульсы напряжения и„ для случая, когда реализуется закон .управления (1), т.е. 1 (t) и . Эти импульсы по ширине заметно отличаются от импульсов, обеспечивающих и(п) const, в результат чего на выходе стабилизатора возни- 56 кает переходной процесс при скачкеи. Предлагаемый способ управления может применяться как в импульсных преобразователях постоянного напряжен1|я в постоянное, как рассмотрено выше, так и в преобразователях постоянного напряжения в переменное, в частности квазисинусоидальное, если Uy изменяется по ступенчатосинусоидальному закону. Во всех случаях способ позволяет значительно повысить стабильность и качество выходного напряжения при действии входных возмущений без применения дополнительных знергоемких входных и выходных фильтров. Это в свою очередь приводит к снижению массы и габаритов преобразователя в целом. ула изобретения Способ управления импульсным преобразователем постоянного напряжения, включающим силовые ключи импульсной части, заключающийся в том, что .при постоянной частоте модуляции в начале каждого периода модуляции производят включение силовых ключей импульсной части, в каждом периоде модуляции формируют сигнал, пропорциональный текущему значению интеграла от входного напряжения преобразователя, формируют регулирующий сигнал, сравнивают его с управляющим сигналом и при равенстве этих сигналов производят выключение силовых ключей импульсной части преобразователя, о т л и ч а ющ и и с я тем, что, с целью улучшения качества выходного напряжения при действии входных возмущений, ополнительно формируют сигнал, пропорциональный текущему значению нтеграла от выходного напряжения преобразователя за текущий период одуляции, этот сигнал суммируют сигналом, пропорциональным среднему значению падения напряжения на импульсном преобразователе постоянного напряжения, из полученного уммарного сигнала вычитают сигнал, орпорциональный текущему значению нтеграла от входного напряжения преобразователя, полученный разностый сигнал умножают на положительный сигнал, равный сумме составляюих,- пропорциональных значениям
входного возмущения и производной от него, ограниченный по модулю и затухающий во времени, и полученный в результате умножения сиг126265610
нал суммируют с сигналом, пропорциональным текущему значению интеграла от входного напряжения, получая при этом регулирующий сигнал.
сриг.г
К
фаг. Л
| Сазонов BiB | |||
| Компенсационно-параметрические импульсные стабилизаторы постоянного напряжения | |||
| М., Энергоатомиздат, 1982, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| Там же, с | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
