Изобретение относится к электротехнике и предназначено для использования при осуществлении вторичного электропитания устройств автоматики и радиоэлектроники с повышенными требованиями к стабильности вторичного питающего напряжения при значительных изменениях первичного напряжения и высокого уровня сетевых помех.
Цель изобретения - повыщение качества и сокращение времени стабилизации путем обеспечения постоянства среднего значения выходной переменно й не только в установившемся, но и в переходном режиме и форсировки последнего.
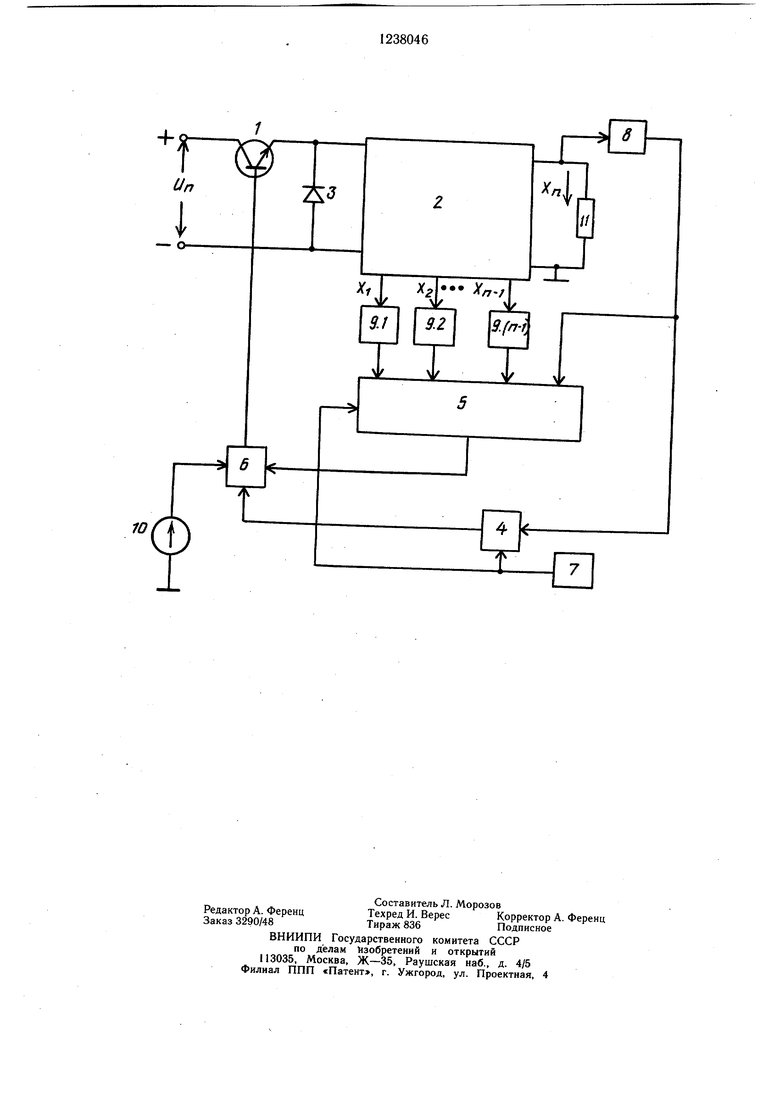
На чертеже представлена общая структура реализации предлагаемого способа управления импульсным стабилизатором среднего значения выходной переменной.
В приведенной структуре отмечены силовой транзисторный ключ 1, непрерывная часть 2, замыкающий диод 3, интегратор 4, вычислительный блок 5, блок 6 сравнения, задающий генератор 7, датчик 8 выходной переменной Х„, датчики 9.1-9. (п-1) переменных Xi-Х„ 1 непрерывной части 2, источник 10 опорного (управляюшего) сигнала, нагрузка 11.
Силовой транзисторный ключ 1 включен последовательно с непрерывной частью 2 и нагрузкой 11. Сигнальные входы вычислительного блока 5 через датчик 8 выходной переменной Х„ и датчики 9.1-9. (п-1) переменных соединены с выходами непрерывной части 2. Сигнальный вход интегратора 4 подключен к выходу датчика 8 выходной переменной Х„. Выход задающего генератора 7 соединен с установочными входами интегратора 4 и вычислительного блока 5. Входы блока 6 сравнения подключены к выходам интегратора 4, вычислительного блока 5 и источника 10 опорного сигнала; а выход - к управляющему входу силового транзисторного ключа 1. Под выходной переменной Х„ подразумевается напряжение или ток нагрузки 11, среднее значение которого требуется стабилизировать.
В основе импульсных стабилизаторов с ключом последовательного типа лежит принцип управления, обеспечивающий постоянство вольт-секундной площади импульсов напряжения, поступающих на непрерывную часть 2. При этом устройство управления в каждом п-м периоде модуляции (п 1, 2, ...) реализует равенство
C«-i)T+to
(n-l)T + to,
CH-DT
(1)
где TO - длительность интервала, в течение
которого ключ 1 открыт; t/io - опорное (управляющее) напряжение на выходе источника 10;
Un - напряжение питания; Т - постоянный период модуляции. Разделив обе части (1) на Т, получаем
С11-1)ТЛ,
±5 /„rf,M()z:±ioL
(2)
tn-i)T
Левая часть выражения (2) представляет собой среднее за период модуляции значение напряжения на входе непрерывной части 2. Оно не зависит от значения /7„ и определяется только опорным (управляющим) напряжением Uio и периодом Т.
Реализация уравнения (1) в известных технических решениях обеспечивает высокую статическую точность стабилизации по входному напряжению Un. Однако в динамических режимах, когда Un непрерывно изменяется (пульсация, скачки и др.), выходная переменная Х„ зависит от и„. Это объясняется тем, что в динамических режимах постоянство среднего значения напряжения на входе непрерывной части 2 не обеспечивает постоянства средних значений всех других ее переменных, в т. ч. и выходной. При постоянном Т скачок входного напря- жения Un в компенсационно-параметрическом импульсном стабилизаторе вызывает заметное приращение среднего значения тока в дросселе фильтра, обусловливающее появление отклонения выходного напряжения, которое может значительно превосходить статическую нестабильность. Кроме того, в течение интервала модуляции устанавливается только заданное значение входного напряжения непрерывной части 2. Регулируемая переменная, например напряжение на нагрузке 11, устанавливается только через время, определяемое инерционностью непрерывной части 2.
В данном случае непрерывная часть 2 характеризуется значениями переменных Xi,
Х2 Хл, причем выходная переменная Хп
зависит от Xi, ..., . Вместе с тем значение Х„ не должно зависеть от напряжения питания и„ и в каждом периоде модуляции должно равняться некоторому значению Хпо, определяемому сигналом управления, т. е. в каждом п-м периоде модуляции должно выполняться равенство Х„ п Х„Лп1
Учитывая, что
(3)
иТ
X« nl 4rjx«(t)dt
(4)
си-1)Т и Т const, из (3) и (4) получаем
ttT
Sx«(t) Cn-t)T
где
Х;,п ТХ„Лп
(5) (6)
Интеграл в левой части равенства (5) можно разбить на два интеграла, соответствующих интервалам замкнутого и разомк нутого состояний ключа 1
лТ
Cn-i)T+to
S X«(t)dt+Sx«(t)dt
-ч т,.. .4t« .СCn-0 T
CM-I)T+TO
в интервале te((n-1)Т, (п-1)Т + то) закон изменения переменной Хп определяется граничными значениями переменных Xi, Х2, ..., Х„ в момент времени (п-1)Т и законом изменения напряжения Un
к
X«(t)2Qgi(t) + U«(t)K«(t-To)dt,
ln-j)T
где g/(t), i 1,..., К - фундаментальная система решений однородного дифференциального уравнения, описывающего непрерывную часть 2; K«(t) - весовая функция непрерывной части 2; С,, i 1,..., К - постоянные, определяемые начальными условиями при t (п- -1)Т.
В интервале t в( (п- 1) Т +то, пТ), напряжение и„ на непрерывную часть 2 не действует, последняя совершает свободное движение, закон изменения переменной Х„ определяется только граничными значениями переменных Xi, Х2, ..., Х„ в момент времени (п-1)Т+то и параметрами непрерывной части 2
X«(t),(t),(8)
t-i
где d - постоянные, определяемые начальными условиями при t (п-1)Т + то.
Следует так сформировать длительность интервала то, чтобы равенство (7) выполнялось при любом законе изменения и„ и любых граничных значениях переменных XL ..., Х„.
Если формировать оба интеграла в уравнении (7) аппаратурно, т. е. на основании измерения переменной Хл, то это уравнение при Т const не может быть реализовано в общем случае принципиально. Действительно, при формировании импульса длительностью То значение второго интеграла не может быть учтено по той причине, что его значение не определено. Поэтому в случае аппаратурного интегрирования при формировании То можно учесть только значение первого интеграла. Равенство (7) будет в этом случае выполняться только тогда, когда значение второго интеграла равно нулю или постоянной величине. Этот случай соответствует известному способу управления.
когда переменной Х„ является напряжение на входе непрерывной части 2; после запирания ключа 1 это напряжение близко к нулю и значение второго интеграла мало. 5 В общем случае переменная Хл в интервале te:((n-1)Т+то, ftT) не равна нулю, зависит от граничных условий в момент времени t (п-1)Т-4-то, которые при действии возмущений со стороны источника питания от периода к периоду изменяются, так как
10 не остается постоянным закон изменения Хп в интервале то. Поэтому равенство (7) не реализуется, а следовательно, и не выполняется равенство (3), что и обусловливает недостатки известного способа управления импульсным стабилизатором.
В предлагаемом способе значение второго интеграла также учитывается при формировании интервала то. При этом используется то обстоятельство, что, как следует из выражения (8), закон изменения перемен20 ной Х„ в интервале te((n-l)T+to, пТ) определяется только граничными значениями переменных Х, Х2, ..., Х„ и параметрами непрерывной части 2 и не зависит от и„. Значение второго интеграла в уравнении (7) зависит только от граничных зна
25 чений параметров непрерывной части 2 и длительности интервала (Т-то) tiT 5х„(1)д1 ,((п-1)Т+то),...,Хл(п-1)х
Cn-J)
Р хТ + то), ..., (Т-то)(9)
Чтобы реализовать равенство (7), надо, измеряя текущие значения переменных Xi, Х2 Хл, формировать непрерывно изменяющуюся функцию
,. ,(n-l)T+to) X«((n-I)T + to), ....
(T-to),(10)
где to - время, прошедшее с начала периода
модуляции.
Функция (10) равна значению интеграла от Хл за интервал времени от момента 40 to до конца периода при условии, что в момент to силовой ключ 1 запирается. При t 0 функция (10) совпадает с функцией (9).
Первый интеграл в (7) формируется аппаратурно. Когда сумма этого интеграла и 5 значения функции (10) станет ХпЛп, формирование импульса То заканчивается, т. е. to Q. При этом
(ПЧ),
Sxat)dt + ,((n-l)T + To), ..,
«jn
° Х„((п-1)Т+то), ..., (Т-то),
т. е. с учетом (9) реализуется равенство (7). Таким образом, предлагаемый способ, в отличие от известных принципиально точно обеспечивает выполнение равенства (3) 55 при Т const. Точность стабилизации определяется только инструментальной погрешностью блоков, осуществляющих соответствующие функциональные преобразования
(интегрирование, вычисление, сравнение) и может быть достаточно высокой. Совместно с управлением по отклонению среднего значения переменной Х„ от заданного значения предложенным способом можно полу- чить очень высокую статическую и динамическую точность стабилизации любой одной переменной для любой непрерывной части 2. Предложенный способ управления теоретически обеспечивает полную инвариантность среднего значения переменной Х„ к напряжению питания и„.
При изменении управляющего сигнала в п-м периоде равенства (7) и (3) будут реализованы в том же периоде, если изме- нение Xiio невелико, а непрерывная часть 2 имеет небольшую инерционность. Если сумма интегралов в (7) в п-м периоде в силу, инерционности непрерывной части- 2 не достигает значения Xijn, то ключ 1 остается открытым в течение всего п-го и последующих периодов до тех пор, пока равенство (7) не будет достигнуто. Следовательно, переходный процесс происходит форсированно, чем достигается максимальное быстродействие при отработке управляющего воздействия.
Предлагаемый способ реализуется следующим образом.
Задающий генератор 7 вырабатывает короткие импульсы с постоянным периодом Г, которые в начале каждого периода модуляции устанавливают интегратор 4 и вычислительный блок 5 в исходное состояние (в исходном состоянии напряжение U4 на выходе интегратора 4 равно нулю). Ключ 1 при этом открывается. На выходе интегра- тора 4 напряжение U4 возрастает пропорционально интегралу от Х„. Напряжение Us на выходе вычислительного блока 5 изменяется в соответствии с изменением координат Хь ..., Хп по закону, определяемому функцией (10). Когда сумма U4 + U5 до- стигает значения Uio, блок 6 сравнения срабатывает и запирает ключ 1. Формирование импульса длительностью то заканчивается. Далее процесс повторяется.
Предлагаемый способ целесообразно использовать тогда, когда требуется осуществлять щиротно-импульсную модуляцию с постоянным периодом (имеется задающий генератор, синхронизирующий работу целого ряда блоков системы, в т. ч. и импульсного стабилизатора), а со стороны источника питания действуют значительные возмущения. В этом случае предлагаемый способ позволяет значительно упростить силовую часть импульсного стабилизатора за счет исключения громоздких фильтров и дополнительных стабилизаторов.
Формула изобретения
Способ управления импульсным стабилизатором среднего значения выходной переменной с последовательно включенными силовым ключом и непрерывной частью, основанный на широтно-импульсной модуляции сигнала управления с открытием силового ключа в начале каждого неизменного по длительности периода модуляции, отличающийся тем, что, с целью повышения качества и сокращения времени стабилизации путем обеспечения постоянства среднего значения выходной переменной не только в установившемся, но и в переходном режиме и форсировки последнего, измеряют текущие значения всех переменных непрерывной части стабилизатора, от которых зависит выходная переменная, в каждом периоде модуляции формируют сигнал, соответствующий значению интеграла от выходной переменной за интервал от начала периода модуляции до текущего момента времени, одновременно с учетом текущих значений переменных и математической модели непрерывной части стабилизатора вычисляют значение интеграла от выходной переменной за интервал от текущего момента времени до конца периода модуляции при условии, что в этом интервале силовой ключ заперт, сравнивают сумму обоих интегралов с опорным сигналом и в момент превышения указанной суммой опорного сигнала производят запирание силового ключа.
iJ
- О /7-/
9.2
3.{n-i
f
/ V
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления импульсным преобразователем постоянного напряжения | 1984 |
|
SU1262656A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| Способ управления импульсным стабилизатором | 1985 |
|
SU1495770A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Способ управления импульсным преобразователем напряжения | 1989 |
|
SU1746369A1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
Изобретение позволяет повысить качество и сократить время стабилизации среднего значения выходного напряжения путем обеспечения стабилизации не только в установившемся, но и в переходном режиме. Это достигается тем, что стабилизация основана на широтно-импульсной модуляции сигнала управления. Причем силовой ключ открывается в начале каждого, неизменного по длительности периода модуляции. В каждом периоде модуляции формируют сигнал, соответствующий значению интеграла от выходной переменной величины. Интеграл исчисляют за интервал от начала периода модуляции до текуш.его момента времени. Одновременно с учетом текущих значений переменных величин и математической модели непрерывной части стабилизатора вычисляют значение интеграла от выходной переменной величины за интервал от текущего момента времени до конца периода модуляции. При этом предполагают, что в этом интервале силовой ключ заперт. Затем сравнивают сумму обоих интегралов с опорным сигналом. В момент превышения указанной суммой опорного сигнала производят запирание силового ключа. 1 ил. е (Л to САЭ ОС О О5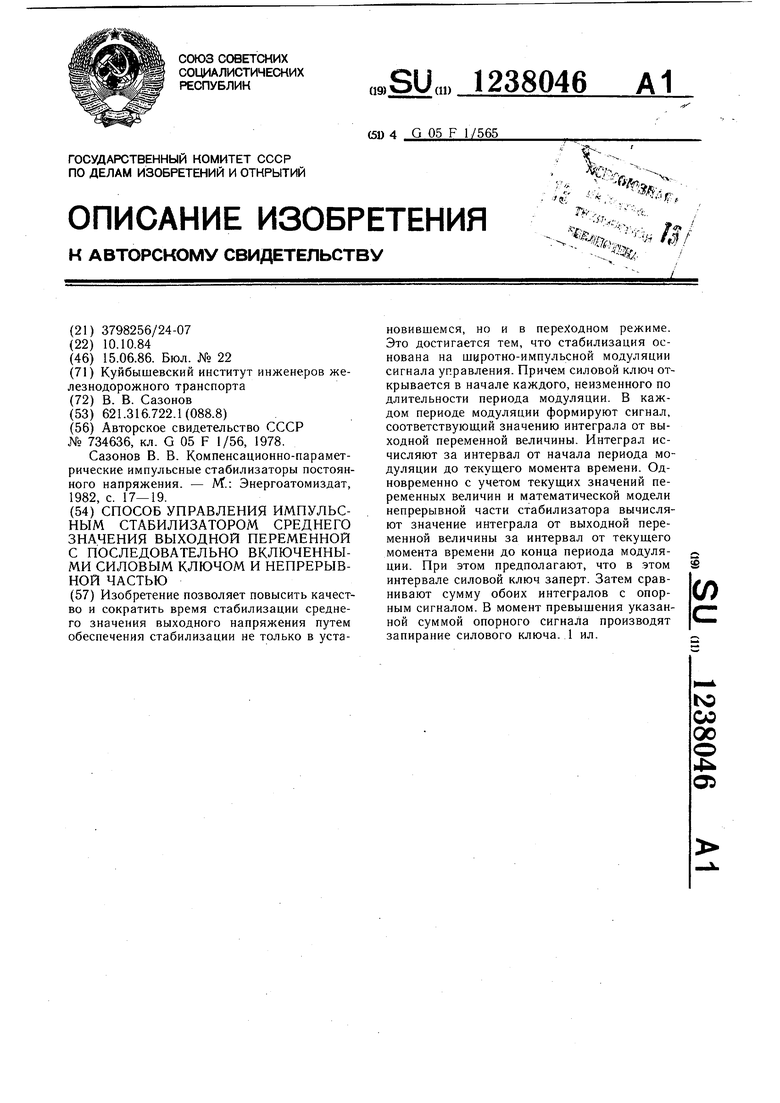
| Способ импульсной стабилизации постоянного напряжения двухтактного стабилизатора | 1978 |
|
SU734636A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Сазонов В | |||
| В | |||
| Компенсационно-параметрические импульсные стабилизаторы постоянного напряжения | |||
| - Nf.: Энергоатомиздат, 1982, с | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
