(Л
с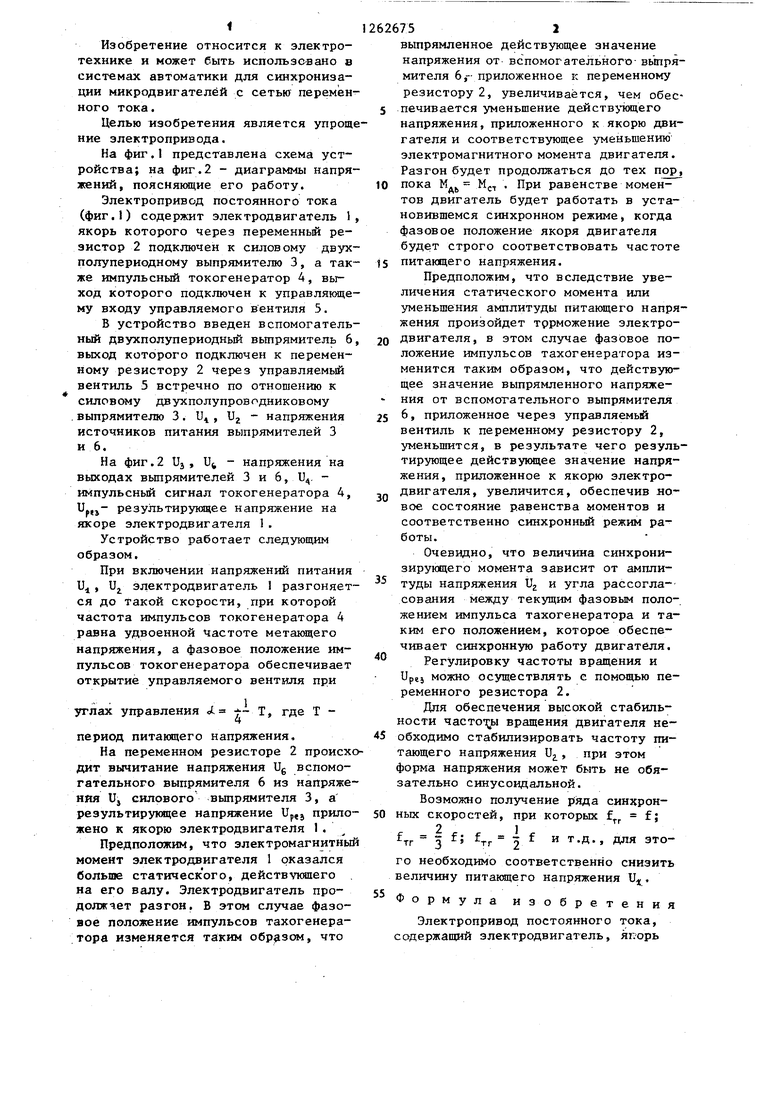
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Многодвигательный электропривод | 1986 |
|
SU1376206A1 |
| Электропривод переменного тока | 1987 |
|
SU1494186A1 |
| Электропривод переменного тока | 1987 |
|
SU1443118A1 |
| Электропривод транспортного средства | 1983 |
|
SU1106001A1 |
| Двухзонный вентильный электродвигатель | 1978 |
|
SU782069A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Вентильный электродвигатель | 1986 |
|
SU1379931A1 |
| Реверсивный вентильный электропривод постоянного тока | 1978 |
|
SU758450A1 |
| Вентильный электродвигатель | 1986 |
|
SU1374391A1 |

Изобретение относится к электротехнике и может быть использовано в системах автоматики для Синхронизации микродвигателей с сетью переменного тока. Упрощение устрсАства обеспечивается за счет регулироваиия дополнительного напряжения, подводимого к якорю электродвигателя 1, вентилем 5, управляемым непосредственно импульсным датчиком 4 скорости. 2 ил.
to
а ю а « ел
О
Фиг.1 1 Изобретение относится к электротехнике и может быть использсвано в системах автоматики для синхронизации микродвигателей с сетью перемен ного тока. Целью изобретения является упрощ ние электропривода. На фиг,1 представлена схема устройства; на фиг.2 - диаграммы напря жений, пояснякщие его работу. Электропривод постоянного тока (фиг.1) содержит электродвигатель 1 якорь которого через переменный резистор 2 подключен к силовому двух полупериодному выпрямителю 3, а так же импульсный токогенератор 4, выход которого подключен к управлякице му входу управляемого вентиля 5. В устройство введен вспомогатель ный двухполупериодньй вьтрямитель 6 выход которого подключен к переменному резистору 2 через управляемьй вентиль 5 встречно по отношению к силовому двухполупроводниковому . выпрямителю 3. U, U - напряжения источников питания выпрямителей 3 и 6. На фиг.2 Uj, и - напряжения на выходах вьшрямителей 3 и 6, 1). импульсный сигнал токогенератора 4, U,,j- результируилцее напряжение на якоре электродвигателя 1 . Устройство работает следующим образом. При включении напряжений питания U.1 , и электродвигатель 1 разгоняет ся до Такой скорости, при которой частота импульсов токогенератора 4 равна удвоенной частоте метакяцего напряжения, а фазовое положение импульсов токогенератора обеспечивает открытие управляемого вентиля при углах управления «L t Т, где Т период питаюцего напряжения. На переменном резисторе 2 происх дит вычитание напряжения Ug вспомогательного выпрямителя 6 из напряже ния Uj силового выпрямителя 3, а результирующее напряжение прило жено к якорю электродвигателя 1. Предполож, что электромагнитны момент электродвигателя 1 оказался больше статического, действующего на его валу. Электродвигатель продолжает разгон. В этом случае фазовое положение импульсов тахогенератора изменяется таким образом, что 75а вьшрямленное действующее значение напряжения от вспомогательного- вьтрямителя 6,- приложенное к переменному резистору 2, увеличивается, чем обеспечивается уменьшение действу мцего напряжения, приложенного к якорю двигателя и соответствующее уменьшению электромагнитного момента двигателя. Разгон будет продолжаться до тех по, пока Мд MC . При равенстве моментов двигатель будет работать в установившемся синхронном режиме, когда фазовое положение якоря двигателя будет строго соответствовать частоте питающего напряжения. Предположим, что вследствие увеличения статического момента или уменьшения амплитуды питающего напряжения произойдет тррможение электродвигателя, в этом случае фазовое положение импульсов тахогенератора изменится таким образом, что действующее значение выпрямленного напряжения от вспомогательного выпрямителя 6, приложенное через управляемый вентиль к переменному резистору 2, уменьшится, в результате чего результирующее действующее значение напряжения, приложенное к якорю электродвигателя, увеличится, обеспечив новое состояние равенства моментов и соответственно синхронный режим работы. Очевидно, что величина синхронизирующего момента зависит от амплитуды напряжения Uj и угла рассогласования между текущим фазовым положением импульса тахогенератора и таким его положением, которое обеспечивает синхронную работу двигателя. Регулировку частоты вращения и Upej можно осуществлять с помощью переменного резистора 2. Для обеспечения высокой стабильности часто- ы вращения двигателя необходимо стабилизировать частоту питающего напряжения Uj, при этом орма напряжения может быть не обязательно синусоидальной. Возможно получение ряда синхроных скоростей, при которых f f; , 2 .. ,, 1 ., f; f f и т.д., для этоо необходимо соответственно снизить еличину питакяцего напряжения И, ормула изобретения Электропривод постоянного тока, одержащий электродвигатель, якорь 3126 которого черезпеременный резистор подключен к силовому двухполупериодному вьшрямителю, а также импульсный тахогенератор, выход которого подключен к управляющему входу управляемого вентиля, отличающийся 2675 тем, что, с целью упрощения, в него введен вспомогательный выпрямитель, выход которого подключен к переменному резистору через управляемый вентиль встречно по отношению к силовому двухполупериодному вьтрямителю.
И П
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ СКОРОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 0 |
|
SU372631A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока | 1980 |
|
SU907747A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
