I t
(Л
со
О)
ю
о
О)
Изобретение относится к электротехнике и может найти применение для электроприводов насосов, вентиляторов и компрессоров.
Цель изобретения - повьппение надежности за счет исключения бросков момента электропривода при переключении вьтрямителей.
На фиг о 1 приведена схема многодвигательного электропривода; на фиг.2 схема нелинейного блока.
Многодвигательный электропривод содержит два синхронных электродвигателя 1 и 2, валы которых механически связаны между собой и с рабо- чей машиной 3, обмотки статоров двигателей предназначены для подключения к источнику питания переменного тока контактами 4 коммутационного аппарата, обмотки роторов двигателей подключаются к входам неуправляемых вьшрямителей 5 и 6, выходы которых подключаются к входам блока 7 переключения выпрямителей 5 и 6 с параллельного соединения на последовательное и обратно, катодньй вьшод вьшрямителя 5 и анодный вывод вьтря- мителя 6 подключаются к выходу блока 8 регулирования скорости электропривода, к управляющему входу блока 7 переключения вьтрямителей 5 и 6 подключен выход блока 9 управления переключением вьшрямителей, а к управляющему входу блока 8 регулирования скорости подключен выход блока 10 управления, вход датчика 11 напряжения подключен к выходу вьтрямите- ля 5, а выход датчика I1 напряжения подключен к первому входу элемента 12 сравнения и через компаратор 13 к входу блока 9 управления переключением выпрямителей, блок 14 задания скорости подключен к второму входу элемента 12 сравнения, выход которого подключен к первому входу функционального блока 15, к второму входу которого подключен выход компаратора 13, а выход функционального, блока 15 подключен к входу блока 10 управления.
Обмотки статоров двигателей 1 и 2 предназначены для подключения к источнику переменного тока путем срабатывания коммутационного аппарата и замыкания при этом его силовых замыкающих контактов 4. В момент пуска электропривода блок 7 переключения выпрямителей обеспечивает параллельное соединение выпрямителей 5 и 6. Блоком 14 задания скорости задается требуемая скорость - электропривода и сигнал Uj , пропорциональный заданной скорости, поступает на один из входов элемента 12 сравнения, где алгебраически суммируется с сигналом Up .поступающим с
0 выхода датчика 11 напряжения. Сигнал UPJ на выходе датчика 11 напряжения пропорционален скорости электропривода и поэтому схемой косвенно реализуется обратная связь по скорости
5 электропривода. В момент пуска сигнал на выходе датчика 11 напряжения равен нулю. В качестве датчика скорости электропривода может также использоваться тахогенератор, установ0 ленный на валу электродвигателей 5 или 6. Сигнал и,, с выхода элемента 12 сравнения, равный U Uj- U поступает на один из входов функционального блока 15.
5 При изменении скорости электропривода в диапазоне от нуля до половины синхронной скорости электродвигателей (0,5 Ыо) компаратор 13 остается в несработанном состоянии,
0 сигнал на его выходе отсутствует и, следовательно, вьшрямители 5 и 6 остаются подключенными параллельно и коэффициент усиления фнукционального блока 15 остается неизменным. Сигнал
5 с выхода функционального блока 15 поступает на вход блока 10 управления, которьш определяет величину управляющего параметра устройства 8 регулирования скорости электроприво0 да и обеспечивает заданную скорость электропривода в соответствии с задающим сигналом Uj в диапазоне ее изменения от нуля до 0,5и„. Управляющим параметром блока регулиро-
5 вания скорости электропривода является активное сопротивление (реостатное регулирование), скважность управляющих импульсов (импульсное управление) , противо-ЭДС (каскадное управ0 ление).
При работе электропривода со скоростью в диапазоне от нуля до 0,5 to,, выпрямители 5 и 6 включены параллельно и поэтому напряжение на выходе 5 блока 8 регулирования скорости изменяется от и до 0,5 и ,
о , лмчUCи
Т.е. не превышает максимальное выпрямление напряжения ротора одного
двигателя, котсгрое оно имеет в момент пуска. При этом ток на выходе блока 8j несмотря на суммирование выпрямленных токов роторов двигателей 1 и 2, также не превьппает максимальный вьшрямленный ток одного двигателя, который он имеет при работе с номинальной скороЬтью и моментом, так как механизмы центробежного принципа действия обладают вентиляторной механической характеристикой (М|. w ) и момент статического сопротивления в этом диапазоне изменения скорости электропривода не превышает 0,5 М .
При достижении скорости электропривода 0,5 Ыо срабатывает компаратор 13 и на его выходе появляется сигнал управления, который поступает на вход блока 9 управления переключением выпрямителей и на первый вход функционального блока 15. Блок 9 управления переключением выпрямителей переводит блок 7 переключения выпрямителей 5 и 6 во второе состояние, при котором вьтрямители 5 и 6 оказываются соединенными последовательно замыкающий контакт блока 7 переключения замыкается, а размыкающие контакты - размыкаются). Напряжение на выходе,блока 8 регулирования скорости скачком возрастает в два раза (с 0,5 и ма1;( Если при ЭТОМ нб изменить управляющий параметр, то ток в обмотках роторов также скачком увеличится в два раза. Это вызывает резкое увеличение (бросок) электромагнитного момента, а следовательно, удар динамического момента на валу электродвигателей и колебание скорости электропривода.
Чтобы этого не произошло необхо- димо изменить во время переключения соединения вьшрямителей 5 и 6 вели- ,чину начально о (до переключения) управляющего параметра ft блока 8 регулирования скорости до конечного (.после переключения) значения по выражению / , где К, - коэффициент пропорциональности при переключении выпрямителей с параллельного соединения на последовательное. Коэффициент К, определяется из условия, чтобы при переключении выпрямителей токи в обмотках роторов и статоров двигателей 1 и 2 не изменялись . Выполнение этого условия
исключает удары динамических моментов и колебания скорости.
Аналогично можно записать для импульсного и каскадного способов регулирования скорости, учитывав обязательное вьшолнение условия 1
™н 1 , принимая во внимание,что время
коммутации блока 7 переключения выпряQ мителей мало и за это время момент статического сопротивления не меняется.
В устройстве изменение управляющего параметра блока 8 регулирования скорости электропривода реализует5 ся следующим образом. Сигнал с выхода компаратора 13 поступает на первый вход функционального блока 15, который скачком изменяет коэффициент усиления примерно в два раза
0 (зависит от согласования сигналов вход-вькод блоков 10 и 8}. После переключения выпрямителей 5 и 6 и изменения коэффициента усиления функционального блока 15 управляющий
5 параметр ( Е,) блока 8 регулирования скорости изменяется так, что увеличение напряжения U на выходе блока 8 регулирования скорос- . ти не вызьшает изменение то0 ка в обмотках -роторов двигателей. После чего возможен разгон, регулирование скорости или переход с повышенной на пониженную скорость в диапазоне от 0,5иоДо w. Коэффи5 циент усиления функционального блока 15 в этом диапазоне изменения скорости больше, чем в диапазоне О - 0,5u),.
При переводе электропривода для
Q работы из области 0,5 Ыр- w в область О - 0,5 cof, , например при остановке электропривода, схема функционирует аналогично, так как требуется вьтолнить то же условие и
5 реализовать функцию ;, ),,
где К 1/К. Когда скорость электропривода снизится до величины несколько меньшей 0,5Ы;,, сигнал на вь1ходе компаратора 13 исчезает, блок
0 9 управления переключением срабатывает и блок 7 переключения вьтгями- телей переводит выпрямители 5 и 6 с последовательного соединения на параллельное. При этом исчезновение
- сигнала на первом входе функционал.- ного блока 15 переводит последний в режим работы с коэс})фициентом усиления соотнетствующим работе электропривода в области скоростей 0-0,5.
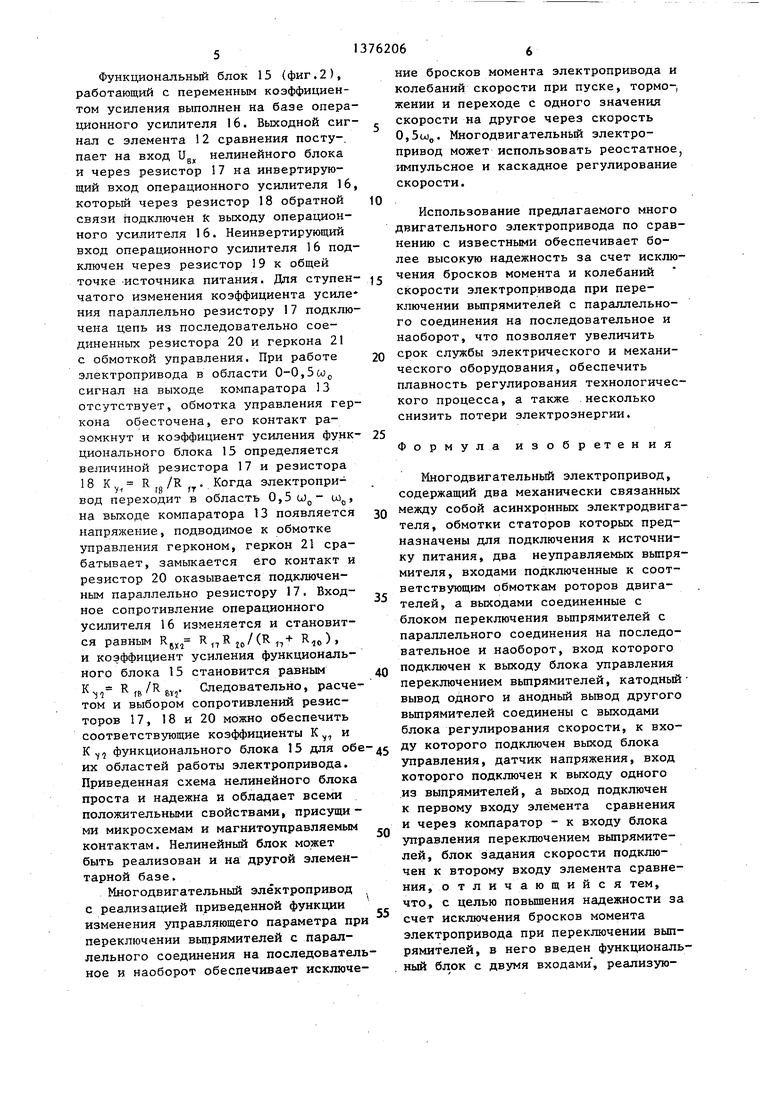
Функциональный блок 15 (фиг.2), работающий с переменным коэффициентом усиления выполнен на базе операционного усилителя 16. Выходной сигнал с элемента 12 сравнения посту-. пает на вход и„„ нелинейного блока
Вд
и через резистор 17 на инвертирующий вход операционного усилителя 16 которьш через резистор 18 обратной связи подключен fc выходу операционного усилителя 16. Неинвертирующий вход операционного усилителя 16 подключен через резистор 19 к общей точке источника питания. Для ступенчатого изменения коэффициента усиления параллельно резистору 17 подключена цепь из последовательно соединенных резистора 20 и геркона 21 с обмоткой управления. При работе электропривода в области 0-0,5Wj, сигнал на выходе компаратора 13 отсутствует, обмотка управления геркона обесточена, его контакт разомкнут и коэффициент усиления функционального блока 15 определяется величиной резистора 17 и резистора 18 К 1 ,(, / ,т электропривод переходит в область 0,5 ы, на выходе компаратора 13 появляется напряжение, подводимое к обмотке управления герконом, геркон 21 срабатывает, замыкается его контакт и резистор 20 оказывается подключенным параллельно резистору 17. Входное сопротивление операционного усилителя 16 изменяется и становится равным Rj,j R,R JO/CR ,+ R,o) и коэффициент усиления функционального блока 15 становится равным К R jg/Я j. Следовательно, расчетом и выбором сопротивлений резисторов 17, 18 и 20 можно обеспечить соответствующие коэффициенты К и К ,,, функционального блока 15 для обеих областей работы электропривода. Приведенная схема нелинейного блока проста и надежна и обладает всеми положительными свойствами, присущими микросхемам и магнитоуправляемым контактам. Нелинейный блок может быть реализован и на другой элементарной базе.
Многодвигательный электропривод с реализацией приведенной функции изменения управляющего параметра при переключении выпрямителей с параллельного соединения на последовательное и наоборот обеспечивает исключение бросков момента электропривода и колебаний скорости при пуске, тормо-, жении и переходе с одного значения скорости на другое через скорость 0,5и)„. Многодвигательный электропривод может использовать реостатное, импульсное и каскадное регулирование скорости.
0
Использование предлагаемого много
двигательного электропривода по сравнению с известными обеспечивает более высокую надежность за счет исклюс чения бросков момента и колебаний скорости электропривода при переключении вьшрямителей с параллельного соединения на последовательное и наоборот, что позволяет увеличить
0 срок службы электрического и механического оборудования, обеспечить плавность регулирования технологического процесса, а также .несколько снизить потери электроэнергии.
5
Формула изобретения
Многодвигательный электропривод, содержащий два механически связанных Q между собой асинхронных электродвигателя, обмотки статоров которых предназначены для подключения к источнику питания, два неуправляемых выпрямителя, входами подключенные к соответствующим обмоткам роторов двигателей, а выходами соединенные с блоком переключения вьтрямителей с параллельного соединения на последовательное и наоборот, вход которого п подключен к выходу блока управления переключением выпрямителей, катодный вывод одного и анодный вьгоод другого выпрямителей соединены с выходами блока регулирования скорости, к вхое ДУ которого подключен выход блока управления, датчик напряжения, вход которого подключен к выходу одного из выпрямителей, а выход подключен к первому входу элемента сравнения и через компаратор - к входу блока управления переключением выпрямителей, блок задания скорости подключен к второму входу элемента сравнения, отличающийся тем, что, с целью повышения надежности за счет исключения бросков момента электропривода при переключении выпрямителей, в него введен функциональ- . ный блок с двумя входами , реализую5
0
5
щий кусочно-линейную функцию - К
Лн
,,2 1, , где Ли , соответственно управляющий параметр блока регулирования скорости электропривода до и после переключения выпрямителей, К - коэффициент пропорциональности при переключении выпрямителей
с параллельного соединения на последовательное, выход элемента сравнения подключен к первому входу нели- нейного блока, ко второму входу которого подключен выход компаратора, а выход функционального блока подключен к входу блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1984 |
|
SU1262679A2 |
| Электропривод | 1987 |
|
SU1427542A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1378003A1 |
| Способ торможения асинхронного электродвигателя | 1983 |
|
SU1136286A1 |
| Устройство для регулирования скорости трехфазного асинхронного двигателя с фазным ротором | 1982 |
|
SU1116515A2 |
| Частотно-управляемый электропривод | 1986 |
|
SU1325656A1 |
| Электропривод | 1983 |
|
SU1220101A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1343534A1 |
Изобретение относится к электротехнике и может быть использовано для электроприводов насосов, вентиляторов и компрессоров. Целью изобретения является повышение надежности за счет исключения бросков момента электропривода при переключении вьтрямителей. Указанная цель достигается за ачет введения нелинейного блока 15, реализующего функцию Ац , где /ь„ и соответственно управляющий параметр блока 8 регулирования скорости до и после переключения выпрямителей, с помощью которого осуществляется изменение управляющего сигнала блока 8 регулирования скорости, что вызывает изменение тока в обмотках роторов двигателей 1 и 2. 2 ил.
20
18
Фиг.2
| Двухдвигательный регулируемый электропривод | 1979 |
|
SU879725A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электротехника, 1986, № 5, с.32-34. | |||
