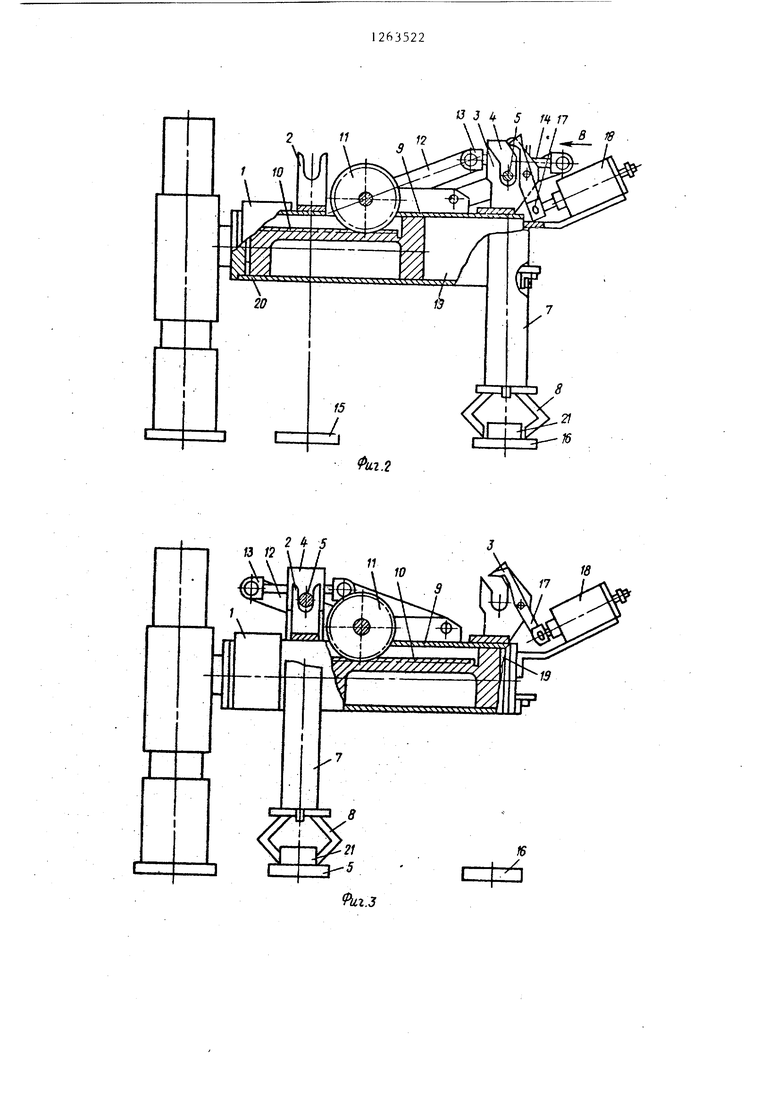
Изобретение относится к области машиностроения, в частности к средствам автоматизации производства, и может быть использовано при подаче деталей на позицию обработки, сборк Целью изобретения является повышение производительности манипутято ра за счет обеспечения промежуточно го фиксированного положения исполни тельного органа на траектории его перемещения и повышения точности ег позиционирования при разгрузке. На фиг. 1 схематически показан манипулятор, исходное положение; на фиг. 2 - то же, в положении установ ки детали; на фиг, 3 - то же, в положении захвата детали; на фиг, 4 вид А на фиг, 1; на фиг. 5 - разрез по Б-Б на фиг, 4; на фиг 5 - вид п стрелке В на фиг. 2, Манипулятор содержит опору 1 с о ,новной 2 и дополнительной 3 стойкам с пазами, устройство крепления захвата, выполненное в виде каретки 4 с роликом 5 и шариковыми фиксаторами 6 и кронштейна 7 с захватным органом 8, привод, выполненный в виде пневмоцилиндра 9 с поршнем-рейкой 10 взаимодействующей с зубчатым колесом 11, закрепленным на поворотном звене 12 шарнирно-рычажного параллелограмма 13. Каретка 4 установлена с возможностью перемещения по направляющим звеиа 14 параллелограмма 1 Стойки 2 и 3 расположены соответственно на позиции 15 загрузки и позиции 16 разгрузки захватного оргага. На стойке 3 установлен двуплечий рычаг 17, одно плечо которого взаимодействует с роликом 5 каретки 4, а другое соединено со штоком пневмоцилиндра 18, имеющего полости 19 и 20, Захватный орган манипулятора взаимодействует с деталью 21, Манипулятор работает следующим образом, В исходном положении ролик 5 Каретки 4 расположен на упоре 17, сжатый воздух подается в полость 19 пневмоцилиндра, а захватный орган 8 находится в точке в траектории своего движения. По команде с устройства управления (не показано) в пневмоцилиндр подается сжатый воздух и его шток, перемещаясь, поворачивает рычаг 17 и выводит его плечо из паза стойки 3, Под воздействием сжатого воздуха в полости 19 пневмоцилиндра 9 поршеньрейка 10 перемещается и поворачивает зубчатое колесо 1. При этом каретка 4, взаимодействуя роликом 5 с .пазом стойки 3, перемещается по траектории, повторяющей профиль паза. На участке в - t движение осуществляется по кривой, на участке г-д - по прямой. Когда ролик 5 начинает движение по прямолинейному участку паза копира 3, шарик фиксатора 6 выводится из гнезда и каретка 4 начинает движение от своего среднего положения по направляющим звена 14, обеспечивая прямолинейный подход захвата 8 на рабочую позицию. Установив деталь 21 на рабочую позицию, манипулятор совершает обратный ход за очередной деталью. Для этого по команде от устройства управления производится переключение подачи сжатого воздуха из полости 19 в полость 20. При обратном ходе поршня-рейки 10 каретка 4 вновь повторяет траекторию движения, соотвутствующую профилю паза стойки 3. В точке г траектории каретка 4 подводится к среднему положению на направляюЩ звена 14 и закрепляется в этом положении фиксатором 6. Далее, пройдя участок г-в, ролик 5 каретки 4 выходит из контакта с пазом стойки 3 и перемещается по криволинейной траектории в - б, При подходе захватного органа к загрузочной позиции 15 ролик 5 каретки 4 входит в паз стойки 2, тем самым обеспечивая прямолинейный его подход для захвата детали 21 из зах- рузочного лотка 15. После захвата детали 21 сжатый воздух поступает в полость 20 пневмоцилиндра, и захватный орган 8 с деталью 21 совершает движение по траекторииd-Б-В до упора в точке в ролика 5 в рычаг 17 В этом полож-ении захват 8 останавливается и ждет командного сигнала на подачу детали 21 на позицию 16, 0 J « 5 щ Фчг. -j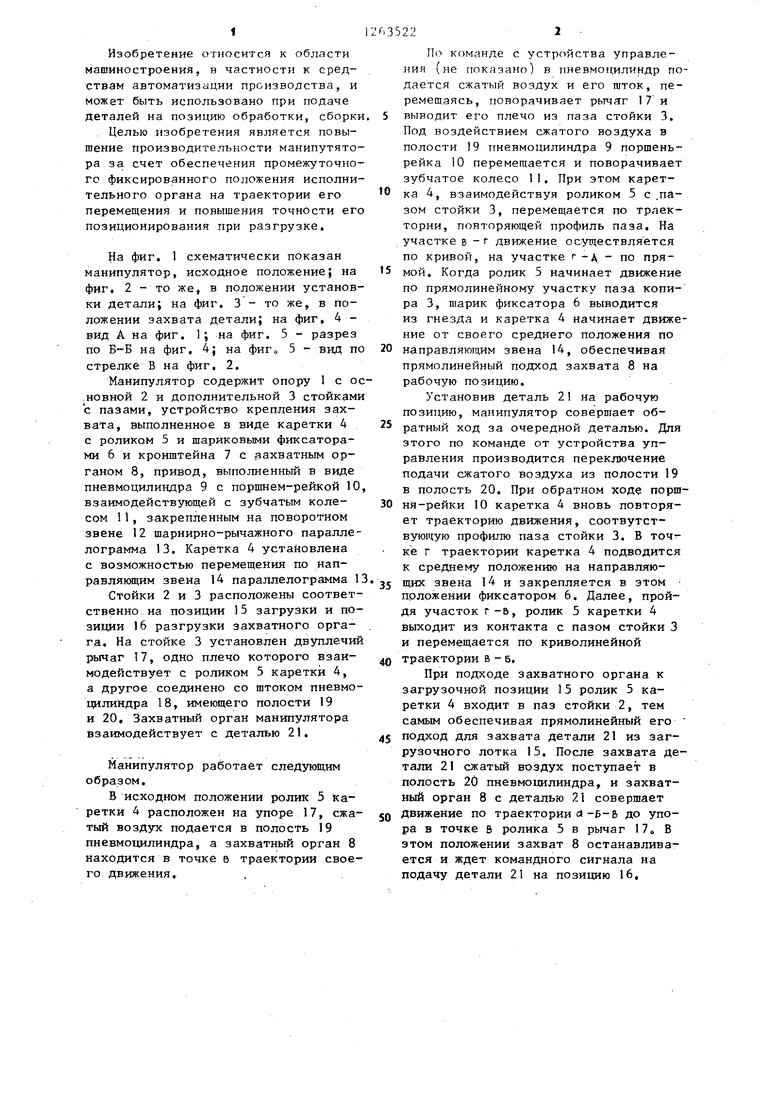
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| УСТРОЙСТВО ДЛЯ ШИРЕНИЯ КОРДА ПЕРЕД ОБРЕЗИНИВАНИЕМ | 1991 |
|
RU2021400C1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Устройство для накладки деталей низа обуви на след | 1977 |
|
SU735236A1 |
МАНИПУЛЯТОР, содержащий ремонтированный на опоре исполнительный орган, выполненный в виде шарнирно-рычажного параллелограмма, на одном из звеньев которого, имеющем возможность плоскопараллельного перемещения, смонтированы захватное устройство, привод, установленный на опоре и кинематически связанный с одним из поворотных звеньев параллелограмма, и основная стойка, закрепленная на опоре в зоне загрузки манипулятора, отличающийся тем, что, с целью повышения производительности за счет обеспечения промежуточного фиксированного положения исполнительного органа на траектории его перемещения и повышения точности его позиционирования, звено параллелограмма, несущее захватное устройство, выполнено в виде няправляющ1-гх, на -которых дополнительно установлена каретка, несущая захватное устройство и ролик, в основной стойке выполнен паз, и на опоре закреплена в зоне разгрузки манипулятора дополнительная стойка с пазом, причем ролик каретки расположен с возможностью взаимодействия с указанн1 1ми пазами W в обеих стойках, кроме того, дополнительная стойка снабжена двуплечим рычагом с индивидуальным приводом с возможностью взаимодействия с роликом каретки.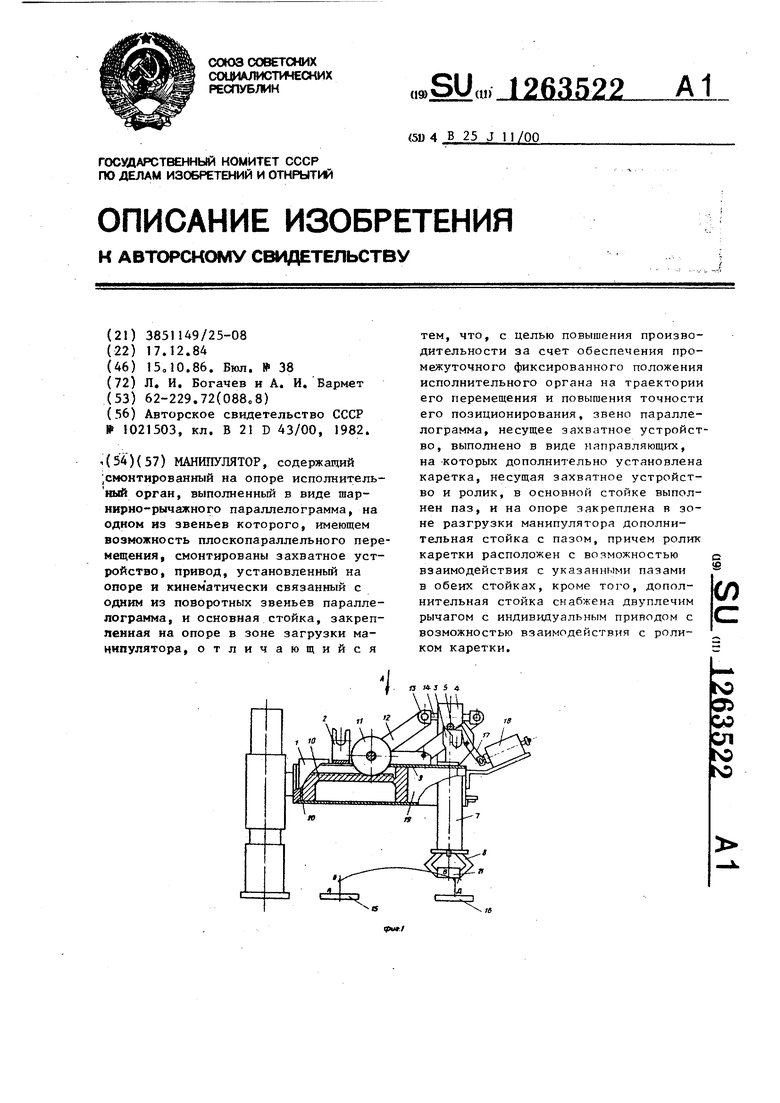
2 ti5
ВидА 1 2 и 12
Г Г/
| Устройство для отделения листовых заготовок от стопы и подачи к обрабатывающей машине | 1982 |
|
SU1021503A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| , | |||
