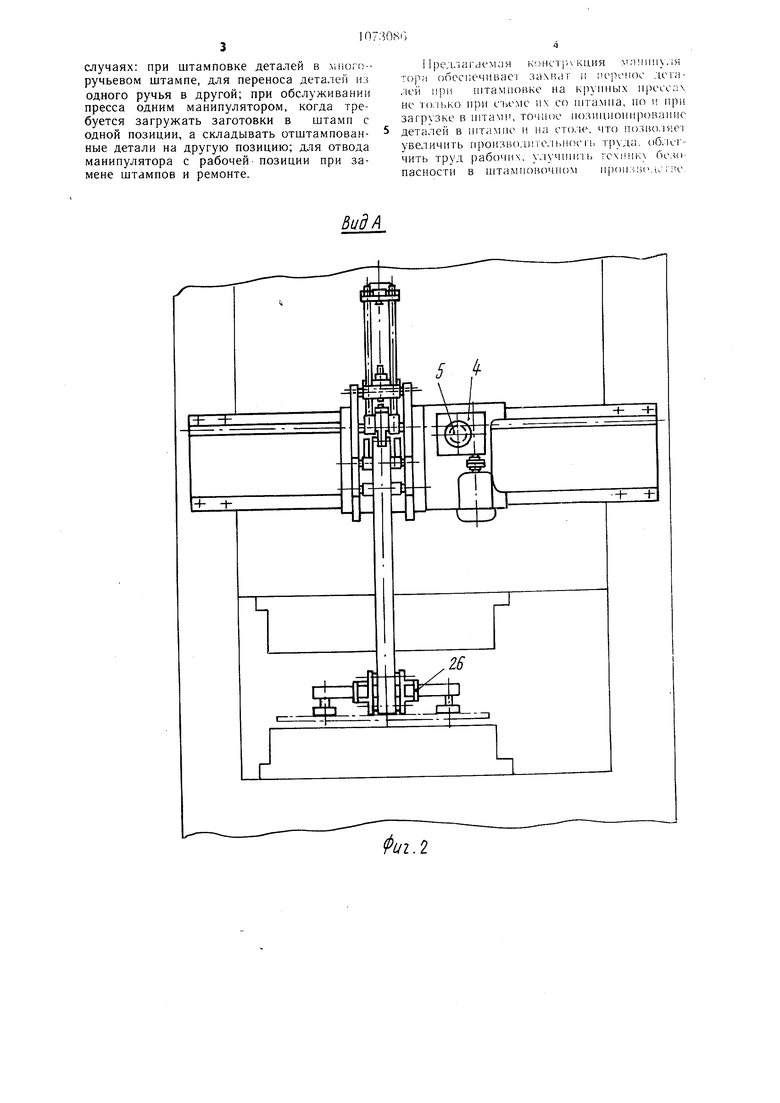
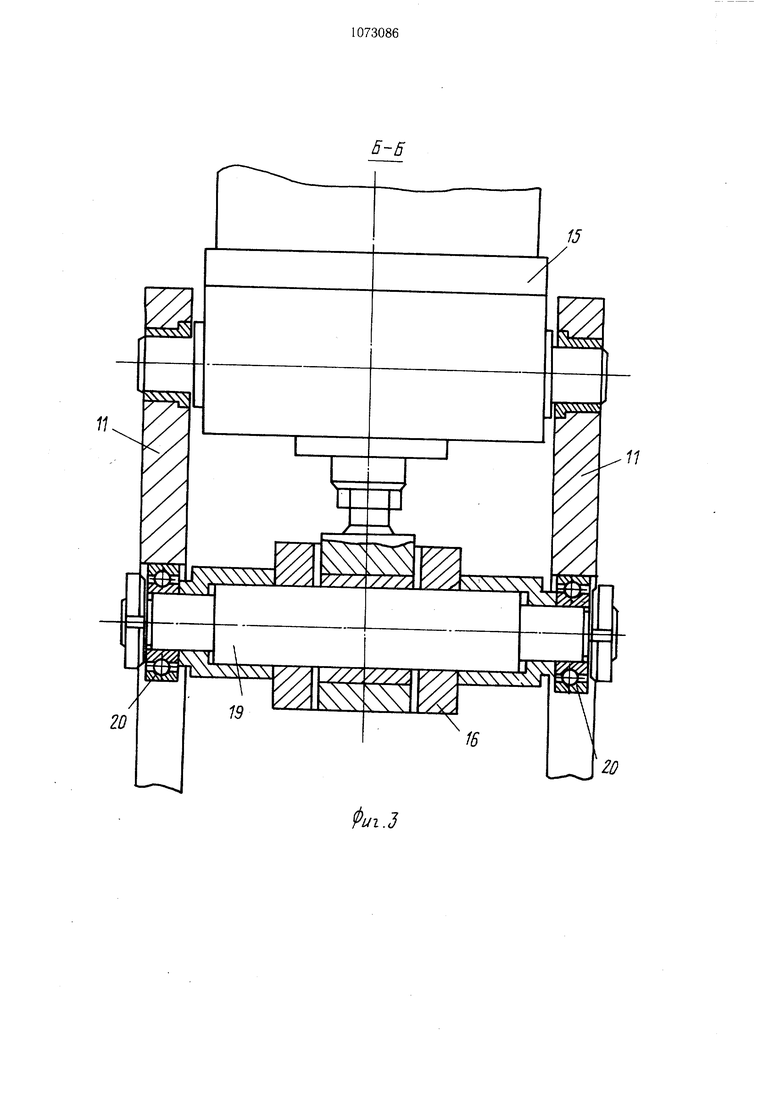
107 Изобретение относится к манипуляторам и может быть использовано в машиностроении, например, для обслуживания кругшых процессов при холодной штамповке. Известен манипулятор, содержащий каретку, установленный на ней пантограф и приводы вертикального и горизонтального перемещений 1. В этом манипуляторе параллелограммьЕ пантографа имеют собственные приводы, кинематически не связанные ме) собой. Позиционирование схвата манипулятора в заданную точку с заданной точностью представляет собой больщие трудности, так как движение схвата осущестсвляется от двух Независимых приводов по двум угловым координатам. Манипулятор требует применения сложного вычислительного устройства для определения координат детали и станка относительно манипулятора и положения пантографа с захватом в пространстве. Цель изобретения - повышение точности позиционирования. Указанная цель достигается тем, что в манипуляторе, содержащем каретку, установленный на ней пантограф и приводы вертикального и горизонтального перемещения каретка связана с приводом вертикалького перемещения и на ней выполнен копирный паз, а пантограф снабжен дополнительным двузвенным механизмом, одно звено которого связано с кареткой, а второе с пантографом, причем на втором звене смонтирован дополнительно введенный ролик установленный в копирном пазу ретки и связанный с приводом горизонтального перемещения. На фиг. 1 показан манипулятор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - се чение Б-Б на фиг. 1; на фиг. 4 сечение В-В на фиг. 1. Манипулятор имеет траверсу 1, закрепленную на станине пресса 2, суппорт 3, передвигающийся по траверсе с помощью привода 4 и реечной передачи 5. На суппорте 3 установлен подвижной стол 6, перемещающийся в вертикальном направлении с помощью винтовой передачи 7 и маховичка 8. На подвижном столе 6 установлена каретка 9, с приводом от силового пневмоцилиндра 10. На каретке жестко закреплены щеки И, имеющие копирные пазы 12. Между щеками на осях щарнирно установлен пантограф 13 и траверса 14 буферного устройства. Шток силового цилиндра 15 щарнирно связан с звеном 16, которое соединено одним концом с звеном 17, а другим - с звеном 18 пантографа. На оси 19 установлены ролики 20 с возможностью перемещения в копирных пазах 12. Гидроцилиндры 21 и 22 буферного устройства закреплены на траверсе 14, через которую в направляющих втулках 23 проходят штанги 24. Штанги 24 одним концом шарнирно соединены с звеном 16, а другим соединены между собой планкой 25. На пантографе 13 6 закре 1лен планками 26 схват 27 в виде электромагнитов или вакуумных присосов. Регулирование вылета схвата 27 осуществляется перемещением схвата между планками 26. На планке 25 и траверсе 14 установлены упорные винты 28 и 29, взаимодействующие со штоками гидроцилиндров 21 и 22 в конце хода звена 16. Манипулятор работает следующим образом. В зависимости от высоты штампа, установленного на прессе, производится регулировка манипулятора по высоте с помощью винтовой передачи 7 и маховичка 8. По сигналу от командоаппарата пресса пневмоцилиндр 10 опускает каретку 9 с закрепленными на ней щеками 11 и пантографом. Вакуумные присосы схвата 27 накладываются на деталь и присасывают ее. Пневмоцилиндр 10 реверсируется и пантограф поднимается. Далее включается силовой цилиндр 15, шток которого воздействует на ось 19, закрепленную в звене 16, и перемещает его. Ролики 20, установленные на оси 19 и в копирных пазах 12, перемещаются в них и поддерживают заданную копирными пазами зависимость углом поворота параллелограммов пантографа 13, тем самым обеспечивая заданную траекторию движения схвата 27 из положения 1 в положение 11. В конце хода звена 16 винт 29 взаимодействует на щток цилиндра 21 буферного устройства, поршень которого перекрывает дросселирующие каналы (не показано). и пантограф 13 со схватом 27 плавно останавливается. Схват 27 при этом переносит деталь под пресс и укладывает ее на щтамп. В зависимости от заданной програм.мы схват 27 опускается на щтамп с помощью пневмоцилиндра 10, или освобождает деталь и она падает под действием силы тяжести на штамп. Далее силовой цилиндр 15 реверсируется и манипулятор возвращается в исходное положение I. В конце хода звена 16 винт 29 воздействует на шток цилиндра 22 буферного устройства, поршень которого перекрывает дросселирующие каналы (не показано), и пантограф 13 со схватом 27 плавно останавливается. При снятии детали со штампа сначала включается силовой цилиндр 15 и, как было описано выше, перемешает схват 27 из положения 1 в положение II. Затем включается Пневмоцилиндр 10, который опускает каретку 9, а вместе с ней пантограф 13 и схват 27. Вакуумные присосы схвата 27 накладываются на деталь, лежащую на штампе, и присасывают ее. Далее Пневмоцилиндр 10 реверсируется и манипулятор поднимается деталь. Затем включается пневмоцилинлр 15, манипулятор выносит деталь из под щтампа и занимает положение I. В зависимости от заданной программы схваг 27 опускается и укладывает деталь, или освобождает ее и она падает под действием силы тяжести, например, на стол. Привод 4 передвижения манипулятора по траверсе I используется в следующ)х
случаях: при штамповке деталей в у.иогоручьевом штампе, для переноса деталей из одного ручья в другой; при обслуживании пресса одним манипулятором, когда требуетс я загружать заготовки в штамп с одной позиции, а складывать отштампованные детали на другую позицию; для отвода манипулятора с рабочей позиции при замене штампов и ремонте.
1реллагаемая I OHCTJA кция млпни ля тора «бссг.ечивасг захн.гг и перенос детл.itH при 111тамп()1ше на крупных ii)t4c;i НС т(),п,ко при с-ьемс их со пггамиа, но и при загрузке в штамп, точное п()зицио}1ир()иаиис деталей в штампе и на CTO/IP, что позво.яет увеличить ироизволительпос 1, труда, облегчить труд рабочих. улучи1ит1 гсммц-л безо пасности в И1тамповочис)м прои:-,:5(
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор к штамповочному прессу | 1990 |
|
SU1787807A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Робот к штамповочному прессу | 1985 |
|
SU1340868A1 |
| Устройство для штамповки деталей из листового материала | 1985 |
|
SU1294430A1 |
| Устройство для подачи заготовок и удаления изделий из штампа | 1989 |
|
SU1738440A1 |
| Установка для автоматической штамповки | 1980 |
|
SU867671A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Устройство для перемещения деталей от пресса | 1986 |
|
SU1388161A1 |

МАНИПУЛЯТОР, содержащий каретку, установленный на ней пантограф (Л со о 00 Ot) и приводы вертикального и горизонтального перемещений, отличающийся тем, что, с целью повышения точности позиционирования, каретка связана с приводом вертикального перемещения и на ней выполнен копирный паз, а пантограф снабжен дополнительным двузвенным механизмом, одно звено которого связано с кареткой, а второе - с пантографом, причем на втором звене смонтирован дополнительно введенный ролик, установленный в копирном пазу каретки и связанный с приводом горизонтального перемещения. I 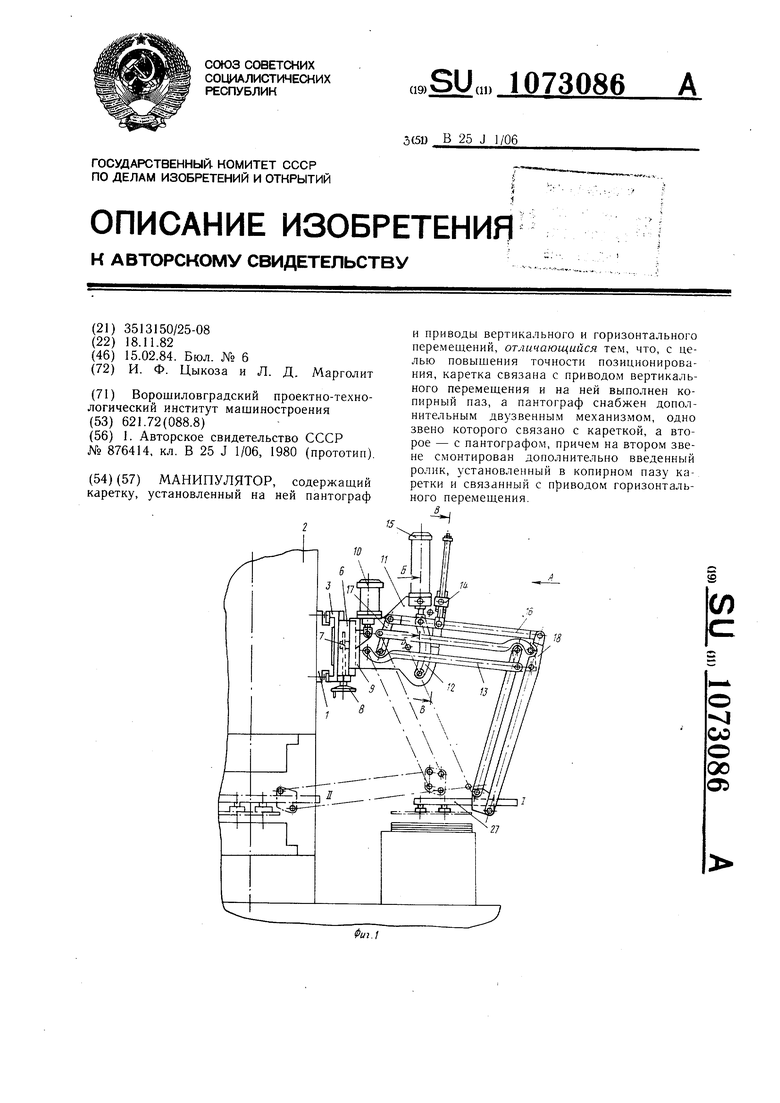
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1980 |
|
SU876414A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
