Изобретение относится к машиностроению и может быть использовано для автоматизации производственных процессов.
Известен манипулятор, содержащий смонтированный в корпусе подъемно-поворотный вал с механической рукой, реверсив- ный привод вала, снабженный двумя кулачками, толкатель и закрепленный на корпусе палец, при этом подъемно-поворотный вал выполнен полым с криволинейным пазом на его стенке, а толкатель и палец размещены соответственно в отверстии и в криволинейном пазу подъемно-поворотного вала, кулачки привода жестко связаны между собой и установлены с возможностью взаимодействия первого кулачка с торцом подъемно-поворотного вала, второго кулачка - с торцом толкателя, а механическая рука установлена подвижной относительно вала в направлении, перпендикулярном его оси, и связана с толкателем двумя гибкими элементами.
В зависимости от профиля паза и кулачков реализуется требуемая траектория перемещения механической руки.
Известен манипулятор, содержащий механическую руку с приводом продольного перемещения, закрепленный на ней палец, поворотный барабан и храповый механизм, имеющий ведомое звено, связанное с поворотным барабаном, на котором.выполнены продольные пазы и установлены регулируемые упоры и ведущее звено, выполненное в виде втулки, имеющей винтовой паз, палец расположен на руке с возможностью последовательного взаимодействия с продольными пазами поворотного барабана и с винтовым пазом втулки храпового механизма.
Манипулятор может совершать продольные и угловые перемещения.
Известен робот к листоштамповочному прессу, содержащий станину, установленный на станине захватный орган, связанный с приводом, подъемный стол для изделий, выполненный в виде смонтированного на
(Л
С
2
CJ 00
ю
станине ходового винта с продольным пазом, взаимодействующим со шпонкой втулки, закрепленной на станине, гайки, установленной на нем, и муфты одностороннего действия, в корпусе которой расположена гайка, связанная с винтом через передаточный механизм, и закреплен рычаг, связанный с валом захватного органа через кривошипно-шатунный механизм, в корпусе муфты выполнен профильный паз, а передаточный механизм выполнен в виде подпружиненного шарика, взаимодействующего с наружной поверхностью гайки и с профильной поверхностью паза,
К недостаткам известных роботов относят разделение во времени операций установки и захвата детали. Такое разделение по времени установки и захвата деталей приводит к появлению холостого хода захватного органа. Нерациональная схема обусловливает 50%-ные затраты времени и энергии на совершение холостых ходов.
Целью изобретения является повышение производительности путем исключения холостого хода.
Подавленная цель достигается тем, что манипулятор, содержащий станину, захватный орган, связанный с приводом и взаимодействующий с механизмом подачи деталей, а также кривошипно-шатунный механизм, снабжен дополнительным захватным органом, штангой, на которой оба захватных органа расположены симметрично, опорой, имеющей сухарь, расположенный на станине, а также маховиком, связанным с приводом и имеющим кулачок, при этом на штанге выполнены два продольные винтовые пазы, взаимодействующие с сухарем опоры, а механизм подачи деталей выполнен в виде расположенных на одной оси двух оправок и делительного диска, а также анкерного механизма, связанного с этим диском и с кулачком маховика, при этом штанга связана с маховиком посредством кривошипно-шатунного механизма, а диски механизма подачи деталей расположены соответственно захватным органом.
Манипулятор предназначен для извлечения спиц (деталей) из оправки и установки этих спиц в пустую оправку, служащих технологическим инструментом при изготовлении графитовых плетений.
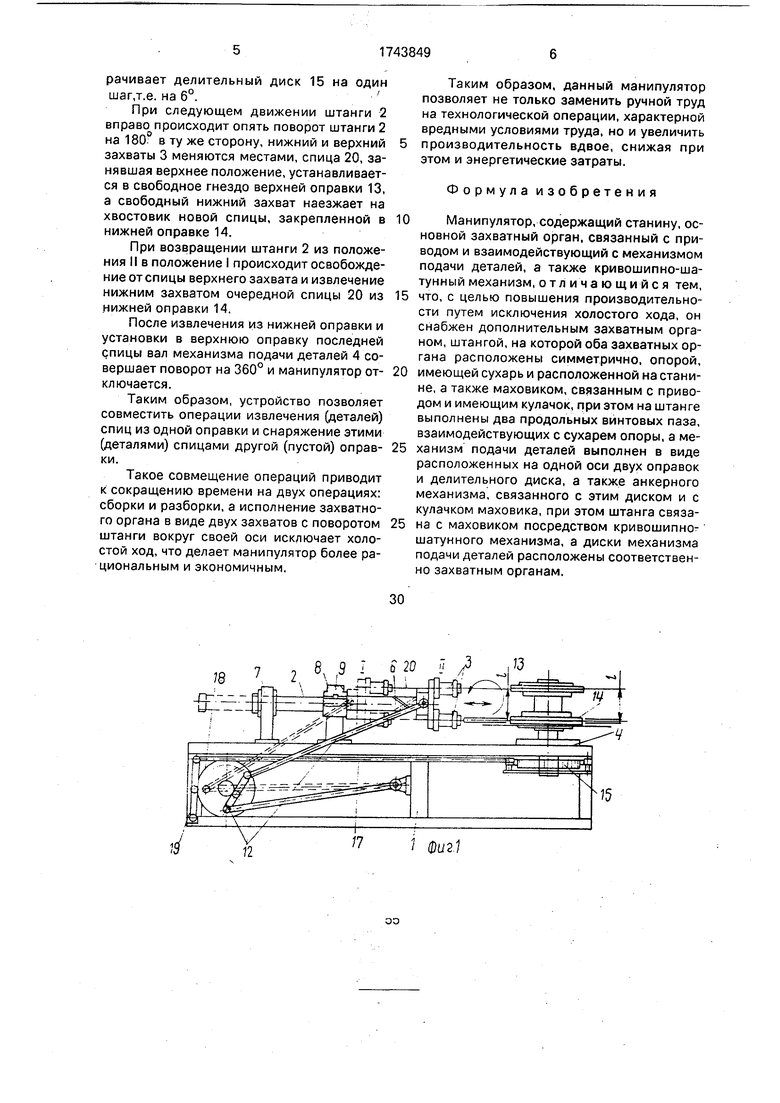
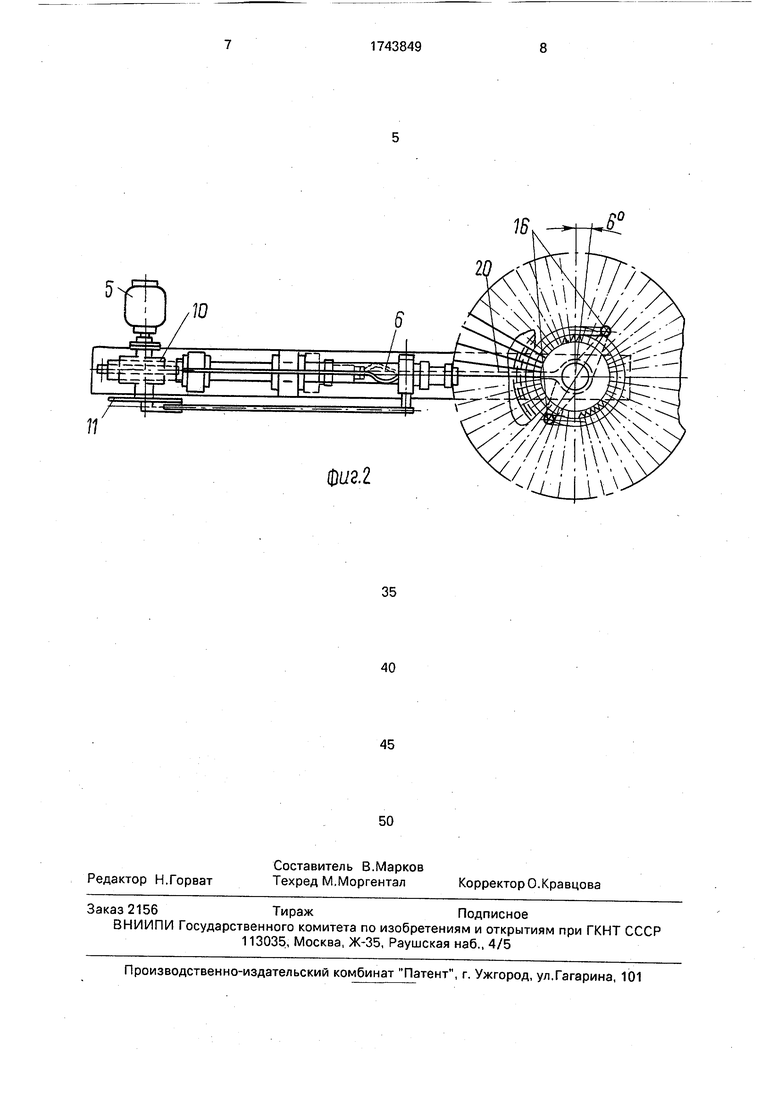
На фиг.1 показан манипулятор, общий вид; на фиг.2 - то же, вид сверху.
Манипулятор состоит из станины 1, на которой сверху установлена штанга 2 с двумя захватными органами 3, механизмом подачи деталей (спиц) 4. В нижней части станины 1 расположен привод 5. Штанга 2
выполнена в виде вала, на одном конце которого консольно закреплены захватные органы. Захватные органы 3 состоят из цанговых захватов, расположенных симмет- рично от штанги 2. На поверхности штанги вдоль ее оси прорезаныодва продольных паза, разнесенных на 180 ,которые у основания, перед креплением захватных органов переходят в винтовые пазы 6. Штанга 2
0 перемещается в опорах 7 и 8. Внутри опоры 8 установлен плавающий сухарь 9, который ориентирует штангу 2. Электродвигатель 5 связан с редуктором 10, на выходном валу которого установлен маховик 11, который
5 через систему рычагов 12 (кривошипно-шатунный механизм удвоенного хода) связан со штангой 2. Механизм подачи деталей (спиц) 4 расположен на станине 1. Он состоит из следующих основных частей: оправок
0 13 и 14, установленных соосно захватам на одном валу, причем пустая оправка 13 устанавливается сверху, оправка 14, на спицах которой нанесено плетение из графитовых нитей, - снизу, делительный
5 диск 15 установлен на этом же валу, взаимосвязан с анкерным механизмом 16. Анкерный механизм тягой 17 через кулачок 18 маховика 11 и копирный ролик 19 связан с системой рычагов 12. Оправка 14 снабжена
0 спицами 20.
Манипулятор работает следующим образом.
От электродвигателя 5 вращение передается на редуктор 10, маховик 11, который через систему рычагов 12 воздействует на штангу 2. В исходном положении штанга 2 находится в позиции I, а сухарь 9 в винтовом заходе 6 штанги 2. При движении штанги 2 вправо сухарь 9 скользит по винтовому за0 ходу, переходящему в прямолинейный паз, При этом штанга 2 вместе со смонтированными на ней захватными органами 3 поворачиваются вокруг своей оси на 180°, нижний захват наезжает на хвостовик спи5 цы 20 - положение II. Далее штанга 2 под воздействием кривошипно-шатунного механизма возвращается в исходное положение I. При этом происходит извлечение спиц 20 нижним захватом из нижней оправки 14,
0 плавающий сухарь 9 скользит в прямолинейном пазу, а при воздействии на него винтового захода 6 отжимается вверх, скользит по поверхности штанги. В этом случае поворота штанги 2 с захватами 3 не
5 происходит. При достижении штанги 2 с захватами 3 крайнего положения I происходит защелкивание сухаря 9 во второй винтовой заход штанги 2. Кулачок 18 маховика 11 воздействует на копирный ролик 19, который через тягу 17 и анкерный механизм 16 поворачивает делительный диск 15 на один шагд.е. на 6°.
При следующем движении штанги 2 вправо происходит опять поворот штанги 2 на 180° в ту же сторону, нижний и верхний захваты 3 меняются местами, спица 20, занявшая верхнее положение, устанавливается в свободное гнездо верхней оправки 13, а свободный нижний захват наезжает на хвостовик новой спицы, закрепленной в нижней оправке 14.
При возвращении штанги 2 из положения II в положение I происходит освобождение от спицы верхнего захвата и извлечение нижним захватом очередной спицы 20 из нижней оправки 14.
После извлечения из нижней оправки и установки в верхнюю оправку последней спицы вал механизма подачи деталей 4 совершает поворот на 360° и манипулятор отключается.
Таким образом, устройство позволяет совместить операции извлечения (деталей) спиц из одной оправки и снаряжение этими (деталями) спицами другой (пустой) оправки.
Такое совмещение операций приводит к сокращению времени на двух операциях: сборки и разборки, а исполнение захватного органа в виде двух захватов с поворотом штанги вокруг своей оси исключает холостой ход, что делает манипулятор более рациональным и экономичным.
0
5
0
5
5
Таким образом, данный манипулятор позволяет не только заменить ручной труд на технологической операции, характерной вредными условиями труда, но и увеличить производительность вдвое, снижая при этом и энергетические затраты.
Формула изобретения
Манипулятор, содержащий станину, основной захватный орган, связанный с приводом и взаимодействующий с механизмом подачи деталей, а также кривошипно-ша- тунный механизм, отличающийся тем, что, с целью повышения производительности путем исключения холостого хода, он снабжен дополнительным захватным органом, штангой, на которой оба захватных органа расположены симметрично, опорой, имеющей сухарь и расположенной на станине, а также маховиком, связанным с приводом и имеющим кулачок, при этом на штанге выполнены два продольных винтовых паза, взаимодействующих с сухарем опоры, а механизм подачи деталей выполнен в виде расположенных на одной оси двух оправок и делительного диска, а также анкерного механизма, связанного с этим диском и с кулачком маховика, при этом штанга связана с маховиком посредством кривошипно- шатунного механизма, а диски механизма подачи деталей расположены соответственно захватным органам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления электрических катушек | 1981 |
|
SU1023419A1 |
| ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ ТРУБ | 1990 |
|
RU2019345C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Устройство для захватывания деталей | 1982 |
|
SU1007972A1 |
| Устройство для последовательной штамповки | 1991 |
|
SU1784382A1 |
| Станок для изготовления проволочных деталей | 1979 |
|
SU897333A1 |
| Установка для термомеханического упрочнения изделий | 1990 |
|
SU1740454A1 |
| Устройство для перемещения длинномерных изделий | 1990 |
|
SU1801687A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
Использование: автоматизация производственных процессов. Сущность изобретения: два захвата органа 3 закреплены симметрично на штанге 2, имеющей возможность продольного перемещения и поворота вокруг своей оси посредством выполненных в ней двух продольных винтовых пазов 6, взаимодействующих с сухарем 9 опоры 8. Механизм подачи деталей выполнен в виде смонтированных на одной оси двух оправок 13 и 14 и делительного диска 15, взаимосвязанного с анкерным механизмом. Взаимодействие штанги 2 с маховиком привода осуществляется через кривошип- но-шатунный механизм, а механизм подачи деталей - посредством тяги 17. 2 ил.
73
-I
t
5
фиг 2
| Робот к листоштамповочному прессу | 1979 |
|
SU863329A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
