fc
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1999 |
|
RU2155142C1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
Изобретение относится к судостроению Цель изобретения - повышение эксплуатационных качеств. Авторулевой содержит сельсин-приемник 1 гирокомпаса, механический дифференциал 2 со штурвалом 3, датчик курса 4, дифференцирующий блок 5, первый сумматор 6, усилитель 7, исполнительный двигатель 8. рулевую машину 9, датчик руля 10. апериодическое звено 11, четвертый интегратор 12, второй сумматор 13, первый 14, второй 15, третий 16, четвертый 17, пятый 18 дополнительные усилители, третий сумматор 19, шестой 20, седьмой 21, восьмой 22, девятый 23, десятый 24 дополнительные усилители, первый 25, второй 26 и третий 27 интеграторы с соответствующими связями. Введение оценок внешнего возмущающего воздействия и угловой скорости поворота приводит к улучшению качества стабилизации судна и повышению надежности в работе авторулевого, 1 ил.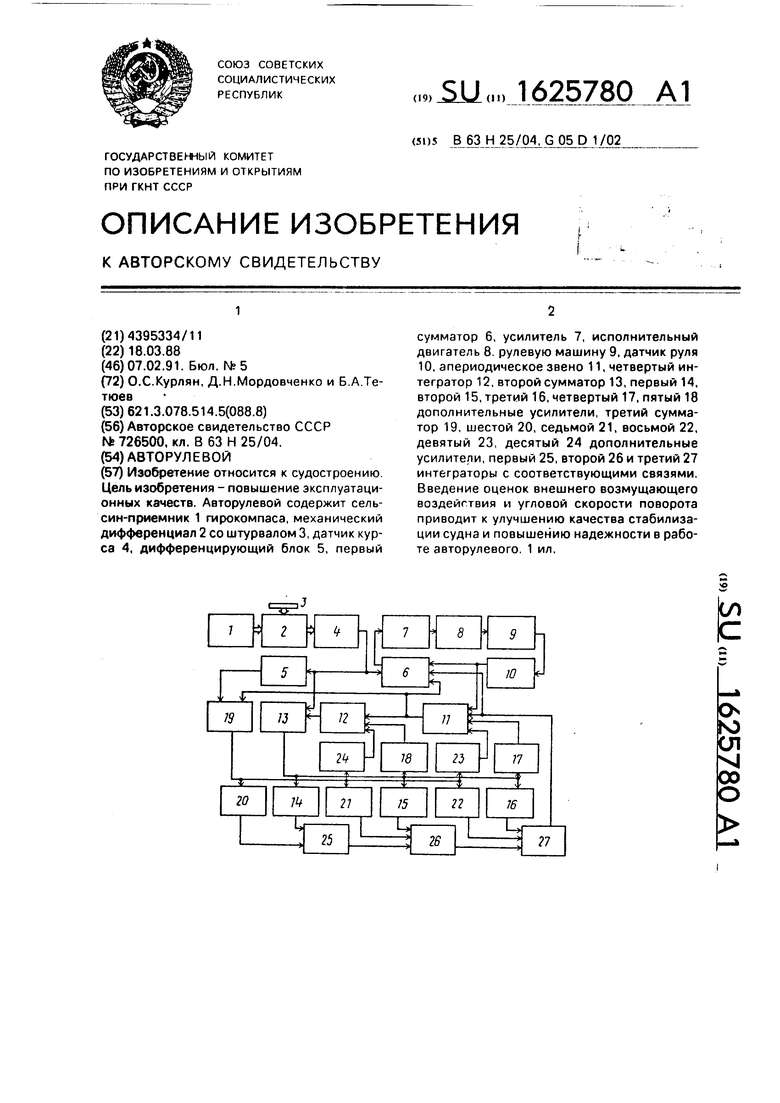
00
о
Изобретение относится к судостроению, а именно к авторулевым.
Цель изобретения - повышение эксплуатационных характеристик.
На чертеже изображена блок-схема предлагаемого авторулевого.
Авторулевой содержит сельсин-приемник 1, кинематически связанный через механический дифференциал 2 со штурвалом 3 и датчиком 4 курса, который соединен с дифференцирующим блоком Бис первым входом первого сумматора 6, который через усилитель 7 последовательно соединен с исполнительным механизмом 8, рулевой машиной 9 и датчиком 10 обратной связи руля, выход которого соединен с третьим входом первого сумматора бис четвертым входом апериодического звена 11, выход которого последовательно соединен с четвертым интегратором 12 и вторым сумматором 13, другой вход которого соединен с выходом датчика 4 курса, и выход подключен к входам первого 14, второго 15, третьего 16, четвертого 17 и пятого 18 дополнительных усилителей, выход дифференцирующего блока 5 соединен с пероым входом третьего сумматора 19, другой вход которого соединен с выходом апериодического звена 11 и с четвертым входом первого сумматора 6, а выход - с входом шестого 20, седьмого 21, восьмого 22, девятого 23 и десятого 24 дополнительных усилителей.
Авторулевой содержит также соединенные последовательно первый 25, второй 26 и третий 27 интеграторы. Выход последнего соединен с первым входом апериодического звена 11 и с вторым входом первого сумматора 6, выходы первого 14 и шестого 20 дополнительных усилителей соединены со- дтветственно с первым и вторым входами первого интегратора 25, выходы второго 15 и седьмого 21 дополнительных усилителей соединены соответственно с третьим и вторым входами второго интегратора 26, выходы третьего 16 и восьмого 22 дополнительных усилителей соединены соответственно с вторым и третьим входами третьего интегратора 27, выходы четвертого 17 и девятого 23 дополнительных усилителей - с вторым и. третьим входами апериодического звена 11, а выходы пятого 18 и десятого 24 дополнительных усилителей - с вторым и третьим входами четвертого интегратора 12.
Многовходовые интеграторы осуществляют интегрирование суммы сигналов, поступающих от соответствующих блоков. Апериодическое звено осуществляет преобразование сигнала с его усилением и запаздыванием по времени.
Авторулевой работает следующим образом.
При отклонении судна от курса сельсин- приемник 1 гирокомпаса через механический дифференциал 2 разворачивает датчик 4 курса, Штурвал 3 служит для введения поправок к курсу. Сигнал с датчика курса 4 поступает на вход дифференцирующего блока 5, а также на первый вход второго
0 сумматора 13 и на первый вход первого сумматора 6 соответственно, с выхода которого сигнал поступает на вход первого усилителя 7, с выхода которого усиленный сигнал поступает на исполнительный механизм 8, ко5 торый смещает из нулевого положения управляющий орган рулевой машины 9. Рулевая машина 9 поворачивает баллер руля и датчик 10 руля, сигнал с выхода которого поступает на третий вход первого суммато0 ра 6 и четвертый вход апериодического звена 11. Руль при этом поворачивается до тех пор, пока сигнал с датчика 10 обратной связи руля не будет равен сигналу с датчика 4 курса.
5Сигналы с датчика 4 курса и с выхода
дифференцирующего блока 5 поступают на первый вход второго сумматора 13 и первый вход третьего сумматора 19 соответственно. Происходит сравнение реальных сигналов
0 отклонения от курса с датчика 4 курса и угловой скорости поворота с блока 5 с оценками аналогичных сигналов, получаемых с выхода и первого входа четвертого интегратора 12 соответственно, Во втором сум5 маторе 13 происходит вычитание сигнала оценки отклонения от курса, поступающего с выхода четвертого интегратора 12 на второй вход второго сумматора 13, из сигнала отклонения от курса, поступающего с вы0 хода датчика 4 курса на первый вход второго сумматора 13. Сигнал, полученный на выходе второго сумматора 13, называется невязкой сигнала отклонения от курса, которая поступает на входы первого 14,
5 второго 15, третьего 16, четвертого 17 и пятого 18 дополнительных усилителей одновременно.
На второй вход третьего сумматора 19 поступает сигнал с первого входа четверто0 го интегратора 12, Невязка сигнала угловой скорости поворота с выхода третьего сумматора 19 поступает на вход шестого 20, седьмого 21, восьмого 22, девятого 23, десятого 24 дополнительных усилителей одновре5 менно.
Сигнал оценки внешнего возмущающего воздействия с выхода третьего интегратора 27, сигнал угла перекладки руля с выхода датчика 10 обратной связи руля, усиленные сигналы с выходов четвертого 17 и
девятого 23 дополнительных усилителей соответственно поступают на входы апериодического звена 11 соответственно. С выхода последнего снимается сигнал оценки угловой скорости поворота судна, который поступает на первый вход четвертого интегратора 12, на вход третьего сумматора 19 и на четвертый вход первого сумматора 6. Усиленные сигналы с выходов пятого 18 и десятого 24 дополнительных усилителей поступают на второй и третий входы четвертого интегратора 12 соответственно. Проинтегрированный сигнал с выхода четвертого интегратора 12 (сигнал оценки угловой скорости поворота) поступает на второй вход второго сумматора 13.
С выхода первого 14 и шестого 20 дополнительных усилителей усиленные сигналы невязок угла отклонения от курса и угловой скорости поворота судна поступают на первый и второй входы соответственно второго интегратора 25, с выхода которого проинтегрированный сигнал поступает на первый вход второго интегратора 26. Усиленные сигналы невязок угла отклонения от оурса и угловой скорости поворота судна с выходов второго и седьмого дополнительных усилителей 15 и 21 соответственно поступают на третий и второй входы второго интегратора 26. С выхода второго интегратора 26 снимается сигнал оценки второй производной возмущающего воздействия, который одновременно с усиленными сигналами невязок угла отклонения от курса и угловой скорости поворота судна соответственно с выходов третьего 16 и восьмого 22 дополнительных усилителей поступают на первый, второй, третий входы третьего интегратора 27 соответственно, с выхода которого снимается сигнал оценки внешнего возмущающего воздействия, который поступает на первый вход апериодического звена 11 и на второй вход первого сумматора 6.
Формула изобретения Авторулевой, содержащий сельсин-приемник, кинематически связанный через механический дифференциал со штурвалом и датчиком курса, а также последовательно соединенные усилитель, исполнительный
механизм, рулевую машину и датчик обратной связи руля, отличающийся тем, что, с целью повышения эксплуатационных характеристик, авторулевой снабжен диф- ференцирующим блоком, тремя сумматорами, десятью дополнительными усилителями, четырьмя интеграторами и апериодическим звеном, при этом дифференцирующий блок подключен к выходу датчика курса, первый
сумматор включен между датчиком курса и основным усилителем, первый вход второго сумматора соединен с входом дифференцирующего блока, а первый вход третьего сумматора соединен с выходом
дифференцирующего блока, при этом входы дополнительных с первого по пятый усилителей соединены с выходом второго сумматора, а входы дополнительных с шестого по десятый усилителей соединены с выходом
третьего сумматора, при этом первый, второй и третий интеграторы, апериодическое звено и чзтвертый интегратор соединены последовательно, причем выход четвертого интегратора соединен с вторым входом второго сумматора, первый вход четвертого интегратора - с вторым входом третьего сумматора, второй вход четвертого интегратора - с выходом дополнительного пятого усилителя, а третий вход четвертого интегратора - с выходом дополнительного десятого усилителя, причем входы первого интегратора соединены с выходами соответствующих им дополнительных первого и шестого усилителей, второй и третий входы
второго интегратора соединены с выходами дополнительных второго и седьмого усилителей соответственно, второй и третий входы третьего интегратора соединены с выходами дополнительных третьего и восьмого усилителей соответственно, а второй и третий входы апериодического звена соединены с выходами дополнительных четвертого и пятого усилителей соответственно, при этом первый вход апериодического звена соединен с вторым входом первого сумматора, а четвертый вход апериодического звена - с выходом датчика обратной связи руля и с третьим входом первого сумматора, четвертый вход которого соединен с выходом апериодического звена.
| Авторулевой | 1978 |
|
SU726500A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
