Этот стабилизатор курса отвечает требованиям стабилизации судов в речных ус.Ювиях. Однако он не отвечает повышенным требованиям к эксплуатации современных судов, не являясь навигационным комплексом, сочетающим в себе курсоуказатель, стабилизатор курса и датчик сигнала, пропор.ционального скорости поворота судна, для использования последнего в законе управления судном и для подачи на индикатор радиолокатора.
Целью изобретения является повышение точности стабилизации и надежный контроль за курсом.
Поставленная цель достигается тем, что стабилизатор содержит дистанционный компас, индикатор радиолокатора, сельсин-датчик, сельсин-приемник, редуктор, электромагнитную .муфту, блок временной задержки курсового сигнала, переключатель постов управления и тахогенератор, механически связанный с двигателем отслеживания, а электрически - со вторым входом фазочувствительного усилителя, со вторым входом усилителя мощности и с индикатором радиолокатора, причем двигатель отслеживания связан через редуктор с дистанционным компасом и сельсино.м-датчиком, соединенным с сельсином-приемником, который механически связан с электромагнитной муфтой, а электрически через переключатель постов управления и блок временной задержки курсового сигнала соединен с третьим входом усилителя .мощности.
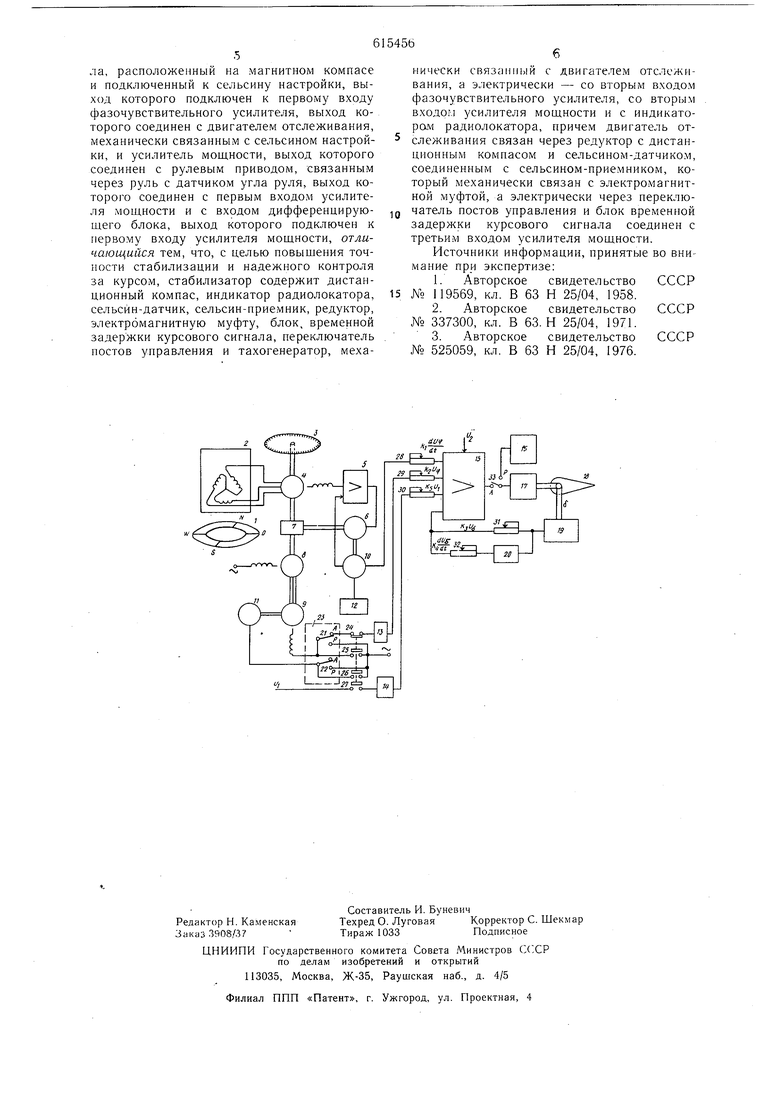
На чертеже представлена с.хема стабилизатора курса.
Он включает в себя .магнитный комнас 1, индукционный датчик 2 курсового угла, дистанционный компас 3, сельсин настройки 4, фазочувствительный усилитель 5, двигатель отслеживания 6, редуктор 7, сельсин-датчик 8, сельсин-прие.мник 9, тахогенератор 10, электромагнитную муфту 11, индикатор радиолокатора 12, блок 13 временной задержки курсового сигнала, блок 14 временной задержки сигнала на поворот, усилитель мощности 15, TiocT ручного управления 16, рулевой привод 17, руль 18, датчик угла руля 19, дифференцирующий блок 20, контакты 21, 22 переключателя 23 постов управления, контакты 24, 25, 26, 27 тумблера поворота, регулируе.мые резисторы 28, 29, 30, 31, 32, контакт 33 переключателя 23 постов управления.
Стабилизатор курса управляется по закону
+ К.,Us + К4г,
K.Uv + К.; dt
dt
где - угол перекладки руля, р - угол отклонения от курса, bs, U,j - напряжения, пропорцио нальные соответствующим параметрам.
Сигнал с сельсина настройки 4 поступает на фазочувствительный усилитель 5 и далее на двигатель отслеживания 6, который приводит в согласованное с индукционным датчиком 2 курсового угла положение через
редуктор 7 сельсин настройки 4 и дистанционный компас 3.
Двигатель отслеживания 6 одновременно через редуктор 7 поворачивает сельсиндатчик 8 и тахогенератор 10. С тахогенератора 10 сигнал поступает на фазочувствительный усилитель 5, а через регулируемый резистор 28 на усилитель мощности 15, а также на индикатор радиолокатора 12.
При автоматическом удержании судна и, курсе электромагнитная муфта 1-1 отключена и сельсин-приемник 9 заторможен и работаете трансформаторном режиме. Сигнал с него поступает через контакт 21 переключателя 23 постов управления, контакт 24 тумблера поворота, блок 13 временной задержки курсового сигнала и регулируемый резистор 29 на усилитель мощности 15.
Сигнал Ui на поворот судна в автоматическом режиме подается через контакт 27 тумблера поворота, блок 14 временной задержки сигнала па поворот, регулируемый резистор 30 на усилитель мощности 15.
При поворотах судна в автоматическом режиме и при ручном управлении подается питание через контакт 25 тумблера поворота или контакт 22 переключателя 23 постов 5 управления на электромагнитную муфту 11, сельсин-приемник 9 растормаживается и, работая в индикаторном режиме, отслеживает за курсом судна.
Сигнал обратной связи поступает с датчика угла руля 19, связанного с рулем 18, в усилитель мощности 15 через регулируемый резистор 31, а также через дифференцирующий блок 20 и регулируемый резистор 32. Сигнал, формируемый в дифференцирующем блоке 20, является сигналом по 5 производной от угла перекладки р.уля и способствует исключению выбега руля.
Суммированный в усилителе мощности 15 сигнал через контакт 33 переключателя 23 постов управления поступает на рулевой привод 17, осуществляющий необходимую перекладку руля 18.
Предлагаемый стабилизатор курса речных судов улучшает эксплуатационные характеристики судна, повыщ.ает качество отслеживания и стабилизации судна на курсе, и надежность контроля за курсом и удобен в обслуживании.
Этот стабилизатор исключает обязательность установки путевого компаса в ходовой рубке и позволяет формировать сигнал по производной курсового сигнала внутри собственной структуры, без использования для целей индикации скорости на локаторе специальных гироскопических указателей скорости поворота.
Ожидаемый экономический эффект от внедрения предлагаемого стабилизатора 4,5-8,5 тыс. руб. в год на каждое судно.
, Формула изобретения
Стабилизатор курса речных судов, содержащий индукционный датчик курсового угла, расположенный на магнитном компасе и подключенный к сельсину настройки, выход которого подключен к первому входу фазочувствительного усилителя, выход которого соединен с двигателем отслеживания, механически связанным с сельсином настройки, и усилитель мощности, выход которого соединен с рулевым приводом, связанным через руль с датчиком угла руля, выход которого соединен с первым входом усилителя мощности и с входом дифференцирующего блока, выход которого подключен к первому входу усилителя мощности, отличающийся тем, что, с целью повыщения точности стабилизации и надежного контроля за курсом, стабилизатор содержит дистанционный компас, индикатор радиолокатора, сельсин-датчик, сельсин-приемник, редуктор, электромагнитную муфту, блок, временной задержки курсового сигнала, переключатель постов управления и тахогенератор, мехазадержки курсового сигнала соединен с третьим входом усилителя мощности.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 119569, кл. В 63 Н 25/04, 1958.
2.Авторское свидетельство СССР № 337300, кл. В 63. Н 25/04, 1971.
3.Авторское свидетельство СССР № 525059, кл. В 63 Н 25/04, 1976. нически связанным с двигателем отслеживания, а электрически - со вторым входом фазочувствительного усилителя, со вторым входом усилителя мощности и с индикаторам радиолокатора, причем двигатель отслеживания связан через редуктор с дистанционным компасом и сельсином-датчиком, соединенным с сельсином-приемником, который механически связан с электромагнитной муфтой, а электрически через переключатель постов управления и блок временной
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизатор курса речных судов | 1974 |
|
SU525059A1 |
| Стабилизатор курса речных судов | 1972 |
|
SU449853A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| СУДОВОЕ АВТОМАТИЧЕСКОЕ РУЛЕВОЕ УСТРОЙСТВО | 1966 |
|
SU180974A1 |
| СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОЛ1 СУДОВОГОРУЛЯ | 1967 |
|
SU206335A1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Автоматический стабилизатор курса судов | 1959 |
|
SU126383A1 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
