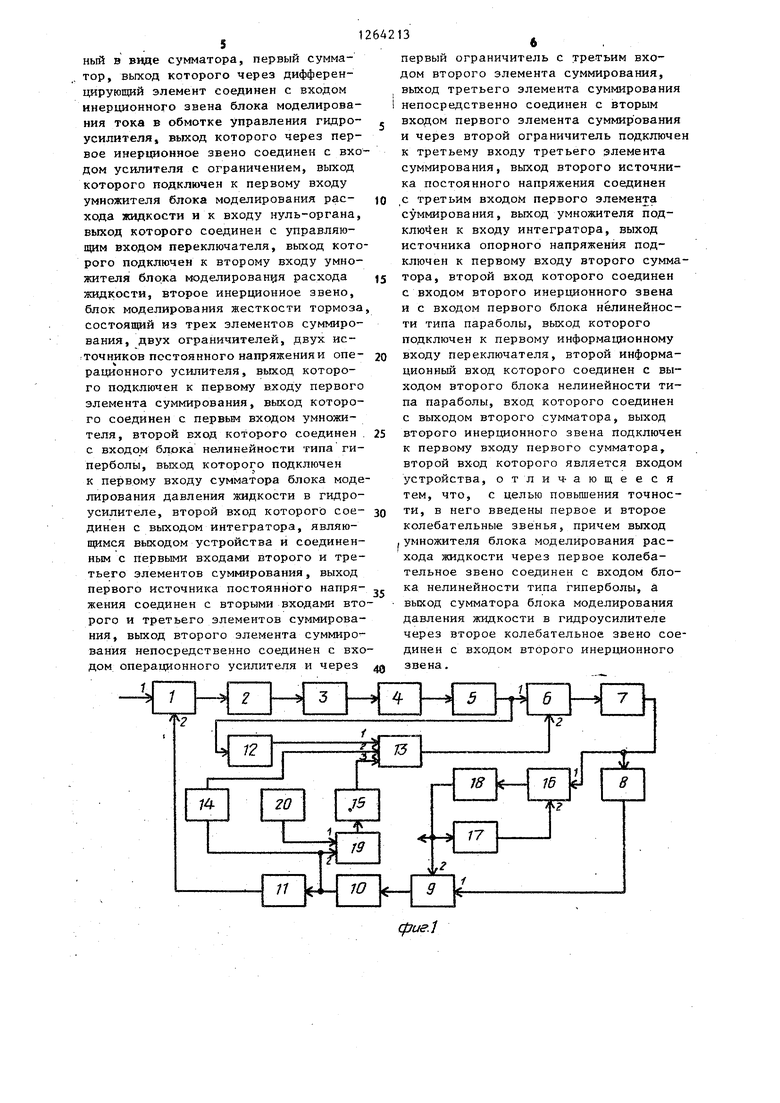
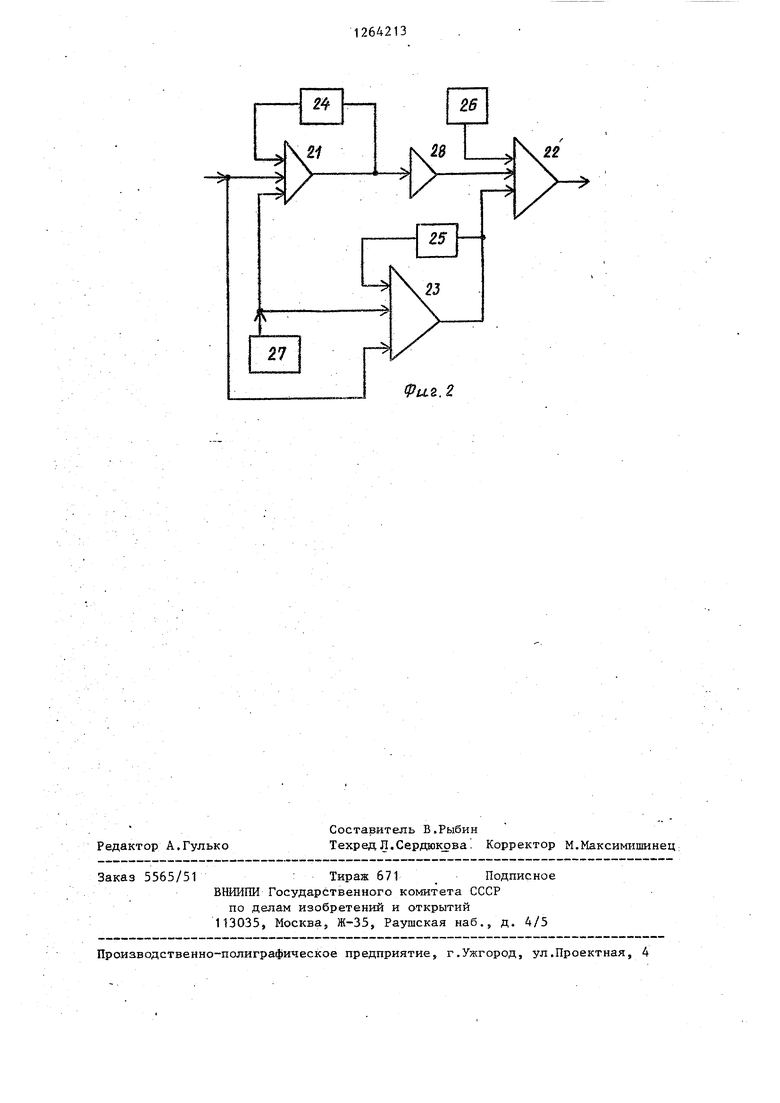
Изобретение относится к аналоговой вычислительной технике и может быть использовано для воспроизведения гидравлических систем дистанцион ного управления давлением в тормозах колес, а также при моделирова;нии гидравлических систем с трубопровода ми, и гидравлических приводов широкого применения. Целью изобретения является повышение точности- воспроизведения гидравлической системы дистанционного управления давлением в тормозах колес. На фиг. 1 представлена блок-схема устройства на фиг. 2 - то же, блок моделирования жесткости.тормоза. Устройство содержит первый сумматор 1, дифферентдирующий элемент 2, блок моделирования тока в обмотке управления гидроусилителя, вьшолненньй в виде инерционногозвена 3,первое инерционное звено 4, усилитель 5 с ограничением,блок моделирования расхода жидкости, выполненньй в виде умножителя 6, первое колебательное звено 7, блок 8 нелинейности типа гиперболы, блок моде41иройа шя давления жидкости в гидроусилителе, выполненный в виде сумматора 9, второе колебательное звено 10, второе инерционное звено 11, нуль-орган 12, переключатель 13, первьй блок 14 нелинейности типа параболы, второй блок 15 нелинейности типа параболы, умножитель 16, блок 17 моделирования жесткости тормоза, интегратор 18, сумматор 19, источник 20 опорного напряжения. Блок 17 содержит элементы суммирования 21, 22 и 23, ограничители 24 и-25, источник постоянного напряжения 26 и 27, операционньй уси литель 28. На выходах блоков формируются си налы: и у сигнал управления (входной сигнал устройства) U - сигнал обратной связиi ди - сигнал рассогласования, Ору - сигнал на выходе диф ференцирующего элемента, пропорциональный сигнал на входе электрогидроусилителя; и,- - сигнал на выходе инерционного звена 3, пропорциональ ный сигналу на входе обомтки гидроусилителя, Y - сигнал на выходе усилителя с ограничением, пропорционал ный отклонению золотника Qry - сигн на выходе умножителя 6, пропорщюнальный расходу жидкости на выходе электрогидроусилителяJ Q. - сигнал на выходе первого колебательного звена 7, пропорциональный расходу жидкости на выходе трубопроводаi лР - сигнал на выходе блока 8, пропорциональньй активным потерям давления в трубопроводе; Р - сигнал на выходе интегратора 18; С - сигнал на выходе блока 17, пропорциональный гидравлической жесткости тормоза; -.сигнал на входе второго колебательного звена 10; - сигнал на входе инерционного звена 11, пропорциональный давлению жидкости на выходе электрогидроусилителя, Р - выходной сигнал устройства, пропорцио- ; нальньй давлению жидкости на входе тормоза; Р. - сигнал источника 20 опорного напряжения, пропорциональньй давлению нагнетания жидкости, И, - сигнал на выходе нуль-органа 12; К - передаточньй коэффициент дифференцирующего элемента 2; , Тд„п соответственно передаточный коэффициент и постоянная времени инерционного звена 3 электромеханического преобразователя-, К, - соответственно передаточный коэффициент и постоянная времени инерционного звена 4 (гидроусилителя), К„ - переда точньй коэффициент интегратора 18, пропорциональный передаточному коэффициенту нагрузки трубопровода (тормоза) ; Tj, 4 , i параметры первого колебательного звена 7; Т, / Тд ,5,f - параметры второго колебательного звена 10; V-goa Т - соот-. ветственно передаточный коэффициент и постоянная времени инерционного звена 11 (датчика обратной связи); F(Q) характеристика блока 8 (зависимость активньЕХ потерь давления, в трубопроводе от расхода); F, (Ряу) РЗ н ) соответственjHOхарактеристики блоков 14 и.15 (расходно-перепадные характеристики :электрогИдроусилителя); Р(t), Рр, (t) - Яереходные процессы по давлению соответственно на входе тормоза и на выходе гидроусилителя в реальной гидросистеме; P(t),, (t) переходные, процессы по давлениюсо.ответственно на входе тормоза и на выходе гидроусилителя в устройствепрототипе; P.(t), Р (t) - переходные процессы по давлению соответственно на входе тормоза и на выходе гидроусилителя в предлагаемом устройстве. Устройство работает следующим образом. Для удобства реализации предлага емого устройства произведено эквивалентное преобразование структурной схемы, заключающееся в переносе второго колебательного звена 10 с передаточной функцией где Т - постоянная времени; 4 - показатель колебаний из цепи обратной связи в прямую цепь. В результате эквивалентного преобразования структурной схемы в ее прямой цепи вместо первого колебательного звена 7 с передаточной функцией WQ(S) получим первое колебательное звено 7 с передаточной функцией тупает на второй вход сумматора 1, на первый вход которого поступает сигнал обратной связи U. с выхода инерционного звена 11. Выходной сиг нал сумматора 1 eU U - U является сигналом рассогласования устро ства, который определяет точность, скорость и направление изменения выходного сигнала устройства Р , и через дифференцирующее звено 2 поступа ет на вход инерционного звена 3, выходной сигнал которого U; пропорционален току в обмотке гидроусилителя (ГУ) системы, который вызывает сигнал Y на выходе усилителя 5 с ограни чением, пропорциональный перемещению золотника. Преобразование перемещени золотника в тормозное давление рассмотрим для случая перемещения золот ника в сторону увеличения давления в тормозе Y 0. В этом случае сигна на выходе умножителя 6, пропорционал ньш расходу на выходе ГУ, равен Qr, K,Y , сигнал на выходе первого колебатель I ного звена 7пропорционален расходу жидкости на выходе трубопровода Qr откуда Р - 9х- + ГУ К Этот сигнал получаем на выходе сумматора 9, на один вход которого поступает сигнал Р с пыхода интегратора 18 г К I , на другой - сигнал с выхода блока 8 - -if. пропорциональный активным потерям давления в трубопроводе. Сигнал С, пропорциональный жесткости тормоза, формируется в блоке 1 7 . Переключение второго входа умножителя 6 в зависимости от знака Y к выходу блока 14, на котором реализована зависимость F (Ptv выходу блока 15, на котором реализована зависимость F (Р - Р,,) , происходит с помощью нуль-органа 12 и переключателя 13. Выходной сигнал устройства Р , пропорциональный давлению на входе тормоза с учетом волновых процессов в трубопроводе, получаем на выходе интегратора 18. Таким образом, с помощью предлагаемого устройства воспроизводится гидравлическая система дистанционного управления давлением в тормозах колес, в котором учтены физические процессы, происходящие во всех элементах гидросистемы, в том числе и в трубопроводе, соединяющем электрогидроусилитель и тормоз, что отсутствует в известных устройствах. Переходные процессы в предлагаемом устройстве соответствуют переходным процессам в реальной гидравлической системе дистанционного управления давлением в тормозах колес. Формула изобретения Устройство для моделирования гидравлической системы дистанционного управления давлением в тормозах коес, содержащее блок моделирования тока .в обмотке управления гидроусилителя, вьшолненньй в виде инерционного звена, блок моделирования расхода идкости, вьтолненный в виде умножиеля, блок моделирования давления идкости в гидроусилителе, выполненный в виде сумматора, первый сумматор, выход которого через дифференцирующий элемент соединен с входом инерционного звена блока моделирования тока в обмотке управления гидроусилителя, выход которого через первое инерционное звено соединен с входом усилителя с ограничением, выход которого подключен к первому входу умножителя блока моделирования расхода жидкости и к входу нуль-органа, выход которого соединен с управляющим входом переключателя, выход которого подключен к второму входу умножителя блока моделировануя расхода жидкости, второе инерционное звено, блок моделирования жесткости тормоза состоящий из трех элементов суммирования, двух ограничителей, двух исгТочников постоянного напряжения и oneрационного усилителя, вьосод которого подключен к первому входу первого элемента суммирования, выход которого соединен с первым входом умножителя, второй вход которого соединен с входом блгока нелинейности типа гиперболы, выход которого подключен к первому входу сумматора блока моделирования давления жидкости в гидроусилителе, второй вход которого соединен с выходом интегратора, являющимся выходом устройства и соединенным с первыми входами второго и третьего элементов суммирования, выход первого источника постоянного напряжения соединен с вторыми входами второго и третьего элементов суммирования, выход второго элемента суммирования непосредственно соединен с входом операционного усилителя и через
1
первый ограничитель с третьим входом второго элемента суммирования, выход третьего элемента суммирования непосредственно соединен с вторым входом первого элемента суммирования и через второй ограничитель подключе к третьему входу третьего элемента суммирования, выход второго источника постоянного напряжения соединен с третьим входом первого элемента суммирования, выход умножителя подклю4ен к входу интегратора, выход источника опорного напряжения подключен к первому входу второго сумматора, второй вход которого соединен с входом второго инерционного звена и с входом первого блока нелинейности типа параболы, выход которого подключен к первому информационному входу переключателя, второй информационный вход которого соединен с выходом второго блока нелинейности типа параболы, вход которого соединен с выходом второго сумматора, выход второго инерционного звена подключен к первому входу первого сумматора, второй вход которого является входом устройства, отлич-ающееся тем, что, с целью повышения точности, в него введены первое и второе колебательные звенья, причем выход .умножителя блока моделирования расхода жидкости через первое колебательное звено соединен с входом блока нелинейности типа гиперболы, а выход сумматора блока моделирования давления жидкости в гидроусилителе через второе колебательное звено соединен с входом второго инерционного звена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования элемента энергоблока при переходных режимах | 1988 |
|
SU1672486A1 |
| Устройство для моделирования сухого трения | 1983 |
|
SU1103251A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР | 2012 |
|
RU2506692C1 |
| Регулятор | 1981 |
|
SU964576A1 |
| Устройство для контроля прогрева ротора паровой турбины | 1981 |
|
SU976114A1 |
| Устройство для управления дистанционным манипулятором | 1977 |
|
SU639699A2 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Устройство для контроля обезуглероживания сталеплавильной ванны | 1979 |
|
SU870443A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2551824C1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано для воспроизведения гидравлических систем дистанционного управления. давлением в тормозах колес, а также при моделировании гидравлических систем с трудопровода- ми и гидравлическихприводов широкого применения. Целью изобретения является псвьппение точности. С помощью устройства -.воспроизводится гидравлическая система дистанционного управления давлением в тормозах колес, в котором учтены физические процессы, происходящие во всех элементах гидросистемы, в том числе и в трубопроводе, соединяющем электрогидроусилис тель и тормоз. Переходные процессы ел в устройстве соответствуют переходным процессам в реальной гидравлической системе дистанционного управления в тормозах колес. 2 ил.
| Гамынин Н.С | |||
| Гидравлический привод системы управления | |||
| М.: Машиностроение, 1972, с | |||
| Газогенератор для дров, торфа и кизяка | 1921 |
|
SU376A1 |
| Гамынин Н.С | |||
| Гидравлический следящий привод | |||
| М.: Машиностроение, 1968, с | |||
| Электромагнитное реле | 1922 |
|
SU466A1 |
