Изобретение относится к средствам нелинейной коррекции систем автоматического управления и может быть использовано для коррекции следящих систем, неизменяемая часть которых содержит нелинейные элементы типа зоны нечувствительности.
Цель изобретения - повьтение точности компенсации нелинейным корректрующим устройством влияния нестационарной нелинейности на корректируемую систему.
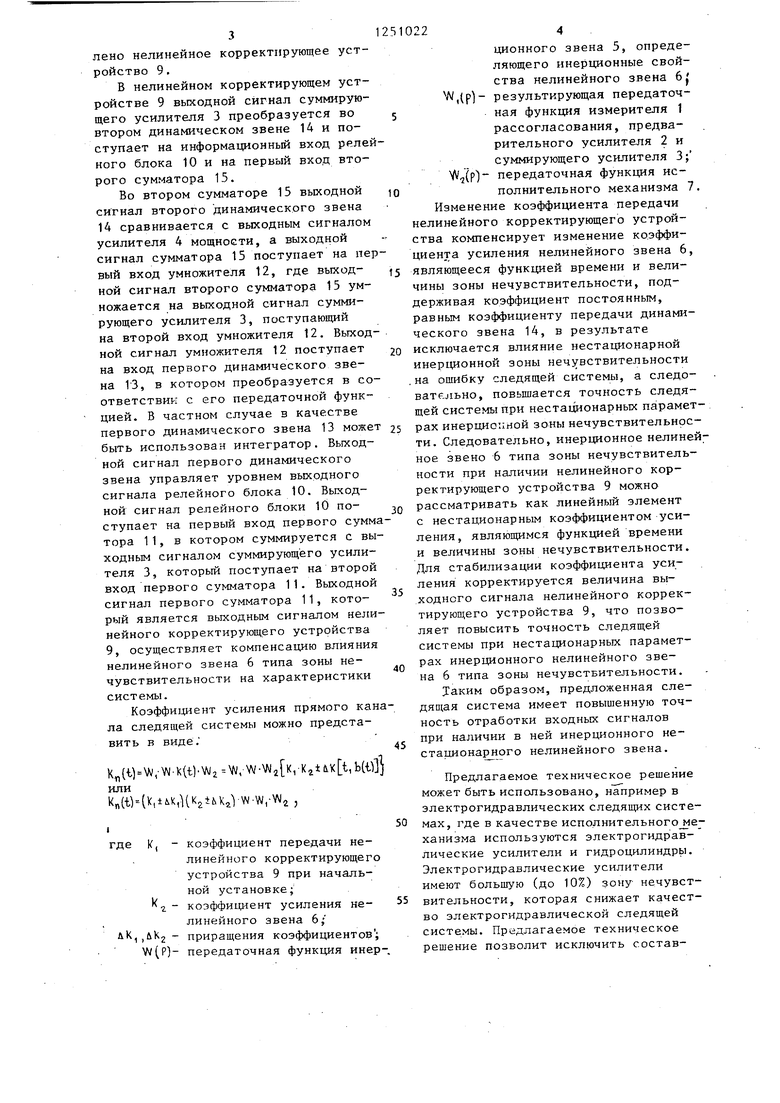
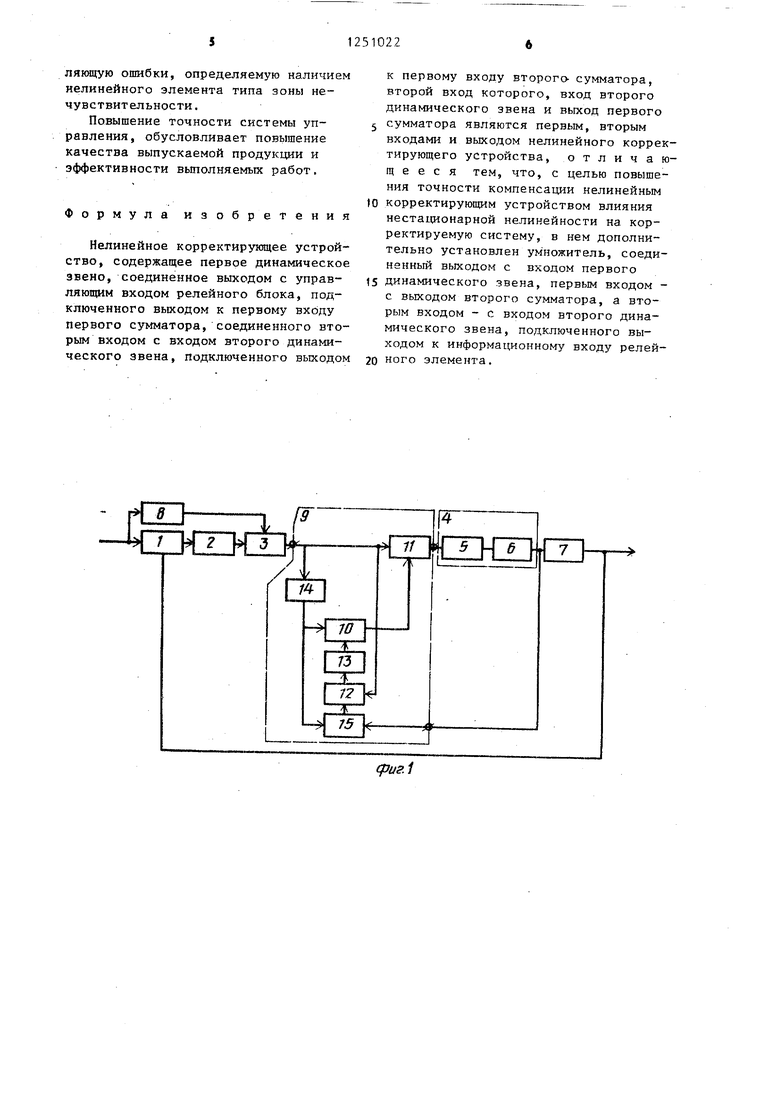
На фиг. 1 приведена структурная схема нелинейного корректирующего устройства в составе следящей системы/ на фиг. 2 - принципиальная электрическая схема релейного элемента, на фиг. 3 - принципиальная электрическая схема умножителя.
Устройство содержит измеритель 1 рассогласования, предварительный усилитель 2, суммирующий усилитель 3, усилитель 4 мощности, инерционное звено 5, нелинейное звено б, исполнительный механизм 7, корректирующий блок 8, нелинейное корректирующее устройство 9, релейный блок 10, первьй cjrMMETop 11, умножитель 12, первое 13 и второе 14 динамические звенья, второй сумматор 15, переключатель 16, повторитель 17, источник 18 опорного напряжения, элемент управления переключателем 19, суммирующий элемент 20, операционный усилитель 21, резисторы 22-25, общую шину 26, полевые транзисторы 27-30, операционный усилитель 31, резисторы 32-34, формирователь 35 импульсов, триггер 36, инвертор 37, операционный усилитель 38, резисторы 39-41, широтно-импульсный модулятор 42, интегратор 43, триггер Шмидта 44, резисторы 45 и 46, переключатель 47, фильтр 48 низких частот, опера- ционньА усилитель 49, резистор 50 и конденсатор 51 ( U; - выходной сигнал i -го блока).
В состав усилителя 4 мощности входит инерционное звено 5 и нелинейное звено 6 типа зоны нечувствительности .
В составе нелинейного корректирующего устройства имеются релейной блок 10, первый сумматор 11, умножитель 12, первое 13 и второе 14 динамические звенья и второй сумматор 15. Характеристики второго динамического звена 14 выбираются в звисимости от характеристик динамического звена 3 усилителя мощности, поэтому, второе динамическое звено
14 является моделью динамического эвена 5.
В состав релейного блока 10 входят переключатель 16, состоящий из четырех полевых транзисторов 27-30 и общей шины 26, повторитель 17,
состоящий из операционного усилителя 31 и резисторов 32-34, источник 18 опорного напряжения, элемент 19 управления переключателем, содержащий формирователь импульсов и триггер
5 36, и суммирующий элемент 20, содержащий операционный усилитель 29, резисторы 22-24, 25 и общую шину 26. Умножителг 12 содержит инвертор 37, состоящий из операционного усиQ лителя 38, резисторов 39-41 и общей шины 26, широтно-импульсный модулятор 42, состоящий из интегратора 43, триггера Шмидта 44 и резисторов 45 и 46, переключатель 47 и фильтр 48
5 низких частот, состоящий из операционного усилителя 49, резистора 50, конденсатора 51 и общей шины 26. Йелин йное корректирующее устройство в составе следящей системы работает следующим образом.
Входной сигнал системы поступает на первый вход измерителя 1 рассогласования, где сравнивается с выходным сигналом исполнительного механизма 7, который поступает на второй вход
5 измерителя 1 рассогласования. Выходной сигнал измерителя 1 рассогласования усиливается в предварительном усилителе 2 и поступает на первый вход суммирующего усилителя 3. Кроме того, входной сигнал системы поступает на вход корректирукяцего блока 8j выходной сигнал поступает на второй вход суммирующего усилителя 3. Передаточная функция корректи рующего блока .8 выбирается из условия обеспечения инвариантности системы, благодаря чему расширяется диапазон входных сигналов, отрабатываемых следящей системой.
0 На выходе измерителя 1 рассогласования формируется сигнал рассогласования, который в значительной сте- дени зависит от величины зоны нечувствительности нелинейного звена 6 55 усилителя 4 мощности. Для исключений этой зависимости в системе между выходом суммирующего усилителя 3 и входом усилителя 4 мощности установ0
0
лено нелинейное корректирующее устройство 9,
В нелинейном корректирующем устройстве 9 выходной сигнал суммирующего усилителя 3 преобразуется во втором динамическом звене 14 и поступает на информационный вход релейного блока 10 и на первый вход второго сумматора 15.
Во втором сумматоре 15 выходной сигнал второго динамического звена 14 сравнивается с выходным сигналом усилителя 4 мощности, а выходной сигнал сумматора 15 поступает на первый вход умножителя 12, где выходной сигнал второго сумматора 15 умножается на выходной сигнал суммирующего усилителя 3, поступающий на второй вход умножителя 12. Выходной сигнгш умножителя 12 поступает на вход первого динамического звена 13, в котором преобразуется в со- ответствик с его передаточной функцией. В частном случае в качестве первого динамического звена 13 может быть использован интегратор. Выходной сигнал первого динамического звена управляет уровнем выходного сигнала релейного блока 10. Выходной сигнал релейного блоки lO поступает на первый вход первого сумматора 11, в котором суммируется с выходным сигналом суммирующего усилителя 3, который поступает на второй вход первого сумматора 11. Выходной сигнал первого сумматора 11, который является выходным сигналом нелинейного корректирующего устройства 9, осуществляет компенсацию влияния нелинейного звена 6 типа зоны нечувствительности на характеристики системы.
Коэффи диент усиления прямого канала следящей системы можно представить в виде.
) V,-VJ.k(t) Vy/2 N, W-V/2 K,-Kjtix t,b(ill или
knW-(if,i,UK2 K4Vw-w,-W2,
коэффициент передачи нелинейного корректирующего устройства 9 при начальной установке;
коэффициент усиления нелинейного звена 6; приращения коэффициентов ; передаточная функция инер-.
510224
ционного звена 5, определяющего инерционные свойства нелинейного звена 6| i(p) результирующая передаточ- 5ная функция измерителя 1
рассогласования, предварительного усилителя 2 и суммирующего усилителя 3; NA/(p )- передаточная функция ис- 10полнительного механизма 7.
Изменение коэффициента передачи нелинейного корректирующего устройства компенсирует изменение коэффициента усиления нелинейного звена 6, t5 являющееся функцией времени и величины зоны нечувствительности, поддерживая коэффициент постоянным, равным коэффициенту передачи динамического звена 14, в результате 20 исключается влияние нестационарной инерционной зоны нечувствительности .на ошибку следящей системы, а следовательно, повышается точность следящей системы при нестационарных парамет- 5 рах инерционной зоны нечувствительности. Следовательно, инерционное нелинейное звено 6 типа зоны нечувствительности при наличии нелинейного корректирующего устройства 9 можно 0 рассматривать как линейный элемент с нестационарным коэффициентом усиления, являющимся функцией времени и величины зоны нечувствительности. Для стабилизации коэффициента усиления корректируется величина выходного сигнала нелинейного корректирующего устройства 9, что позволяет повысить точность следящей системы при нестационарных параметрах инерционного нелинейного звена 6 типа зоны нечувствительности.
Таким образом, предложенная сле- дяп1ая система имеет повышенную точность отработки входных сигналов при наличии в ней инерционного не5
0
5
стационарного нелинейного звена.
Предлагаемое техническое решение может быть использовано, например в электрогидравлических следящих системах, где в качестве исподнительного ме- ханизма используются электрогидравлические усилители и гидроцилиндры. Электрогидравлические усилители имеют больщую (до 10%) зону нечувствительности, которая снижает качество электрогидравлической следящей системы. Предлагаемое техническое решение позволит исключить составляющую ошибки, определяемую наличием нелинейного элемента типа зоны нечувствительности.
Повышение точности системы управления, обусловливает повышение качества выпускаемой продукции и эффективности вьтолняемых работ.
Формула изобретения
Нелинейное корректирунлцее устройство, содержащее первое динамическое звено, соединенное выходом с управляющим входом релейного блока, подключенного выходом к первому входу первого сумматора, соединенного вторым входом с входом второго динамического звена, подключенного выходом
к первому входу второго- сумматора, второй вход которого, вход второго динамического эвена и выход первого
J сумматора являются первым, вторым входами и выходом нелинейного корректирующего устройства, о т л и ч а ю щ е е с я тем, что, с целью повышения точности компенсации нелинейным
10 корректирующим устройством влияния нестационарной нелинейности на корректируемую систему, в нем дополнительно установлен умножитель, соединенный выходом с входом первого
f5 динамического звена, первым входом - с выходом второго сумматора, а вторым входом - с входом второго динамического звена, подключенного выходом к информационному входу релей20 ного элемента.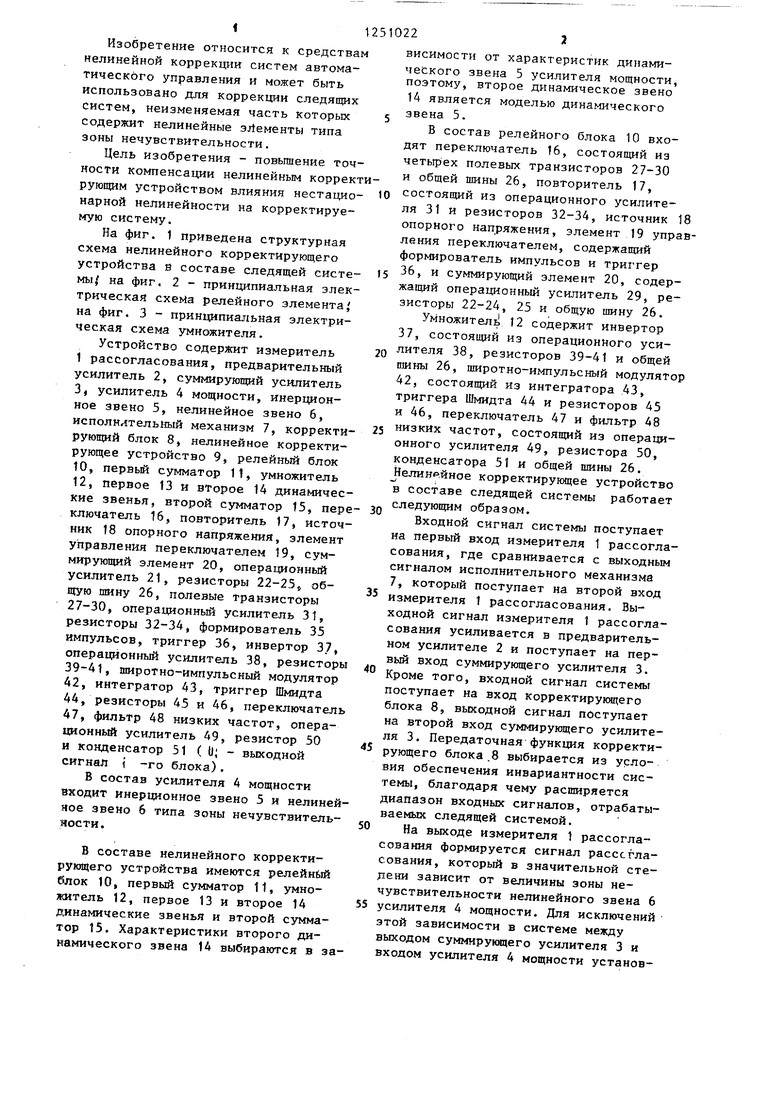
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство компенсации нелинейности | 1982 |
|
SU1037204A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Устройство для компенсации инерционной нелинейности типа насыщения | 1980 |
|
SU940129A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Следящая система | 1980 |
|
SU883861A1 |
Изобретение относится к средствам нелинейной коррекции систем автоматического управления и может быть использовано для коррекции следящих систем, неизменяемая часть которьпс содержит нелинейные элементы типа зоны нечувствительности, например для коррекции гидравлических следящих систем. В устройстве решается задача компенсации влияния зоны нечувствительности на характеристики корректируемой системы. Устройство устанавливается между выходом измерителя рассогласования и входом блока, содержащего зону нечувствительности. Его входными сигналами являются сигнал рассогласования и выходной сигнал блока с зоной нечувствительности. В корректирующем устройстве сигнал рассогласования пропускается через первое динамическое звено, являющееся моделью линейной части блока с зоной нечувствительности, и поступает на вход релейного блока и первый вход первого сумматора. В первом сумматоре этот сигнал сравнивается с выходным сигналом блока с зоной нечувствительности, а результат с рав- g нения поступает на первый вход жителя, в котором умножается на сиг-i J нал рассогласования. Выходной сиг- нал умножителя преобразуется во вто-, ром динамическом звене, например с в интеграторе, и поступает на управ-j ляющий вход релейного блока. Под действием управляющего сигнала меняется величина выходного сигнала релейного блока. Выходной сигнал релейного блока суммируется с сигна-| лом рассогласования, и результируюидий суммарный сигнал является выходным сигналом нелинейного кoppeкти рующего устройства. 3 ил.
(/f
Uro.
сриг.2
Редактор Л.Пчелинская
Составитель Ю.Гладков Техред Н.Бонкало
Заказ 4409/43
Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фигЗ
Корректор Е.Рощко
| Зайцев Г.Ф | |||
| и др | |||
| Комбинированные следящие системы | |||
| - Киев: Техника, 1978, с | |||
| Прибор для массовой выработки лекал | 1921 |
|
SU118A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Хлыпало Е.И | |||
| Нелинейные корректирующие устройства в автоматических системах | |||
| - Л.: Энергия, 1973, с | |||
| Вагонетка для кабельной висячей дороги, переносной радиально вокруг центральной опоры | 1920 |
|
SU243A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
