(5) РЕГУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования гидравлической системы дистанционного управления давлением в тормозах колес | 1985 |
|
SU1264213A1 |
| Импульсный регулятор с опережающим элементом | 1980 |
|
SU964579A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Модель частотно-импульсного модулятора | 1977 |
|
SU651365A1 |
| Устройство для оптимизации фотосинтеза растений | 1989 |
|
SU1690611A1 |
| Устройство адаптации | 1979 |
|
SU813358A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ РЕГУЛИРОВАНИЯ МОЩНОСТИ ДУГОВОЙ ЭЛЕКТРОПЕЧИ | 1969 |
|
SU251718A1 |
| Импульсный регулятор | 1978 |
|
SU796790A1 |
| Устройство автоматического регулирования толщины полосового проката | 1982 |
|
SU1068193A1 |
| Устройство для управления вентильным преобразователем | 1983 |
|
SU1094129A1 |
. , 1 :
Изобретение относится к области нелинейных управляющих устройств и может быть использовано в электрогидравлических (или электромеханических) приводах станкоавтоматов.
Известен регулятор, содержащий формирователь сигнала управления, выход которого соединен с первым входом, а через инерционное звено и поляризованное реле - со вторым входом усилителя мощности с зоной нечувствительности, выход которого соединен со входом исполнительного двигателя, причем поляризованное реле функционально предназначено для анализа вели чины сигнала управления и формирова- ния напряжения смещения, компенсирующего влияния (ЗОНЫ нечувствительности усилителя мощности 11.
Недостатком известного регулятора является его низкая точность и наличие автоколебаний.
Известен ре гуля тор, содержащий по-ч; ляризованное реле и последовательно
соединенные формирователь сигнала управления, усилитель мощности и исполнительный двигатель, причем выход формирователя сигнала управления соединен со входами поляризованного реле непосредственно и через интегратор, а контакты поляризованного реле установлены в цепи разряда интегратора 23- В данном регуляторе практически
to исключены колебания вокруг положения равновесия. Недостатком регулятора является его низкая точность.
Наиболее близким к предлагаемому по технической сущности является ре15гулятор, содержащий источник напряжения смещения, последовательно соединенные интегратор и поляризованное реле, и последовательно соединенные формирователь сигнала управления,
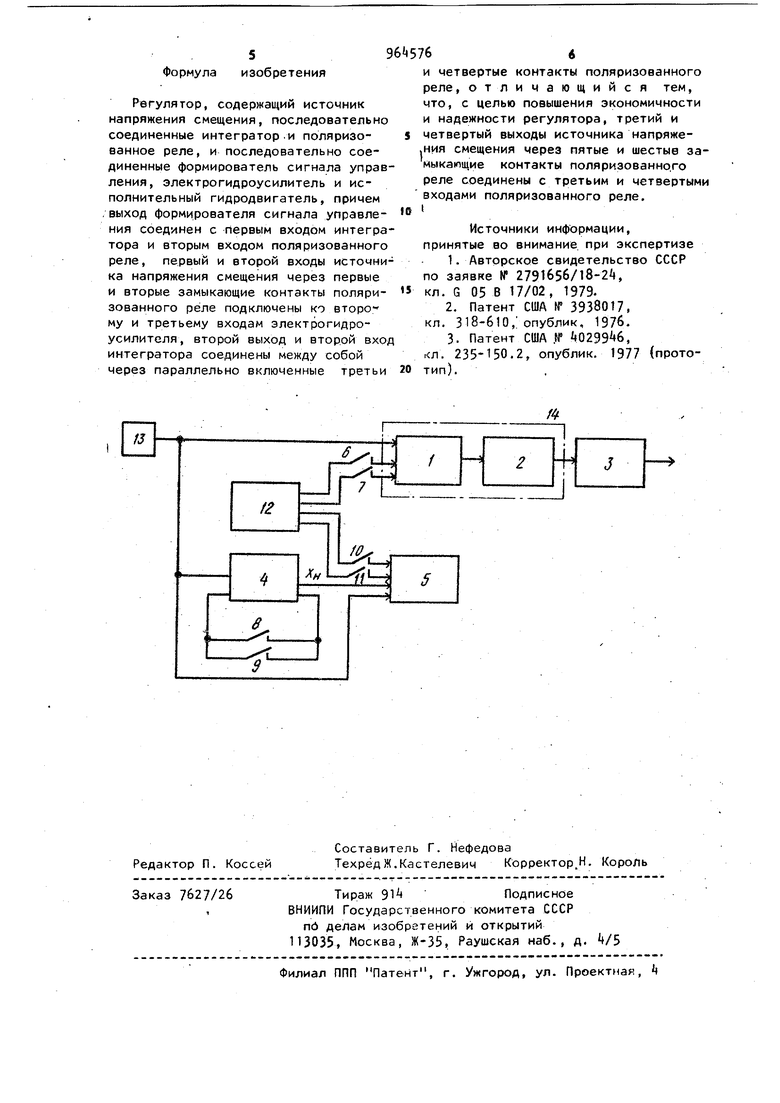
20 электрогидроусилитель и исполнительный гидродвигатель, причем выход формирователя сигнала управления со-, единен с первым входом интегратора и вторым входом поляризованного реле первый и второй входы источника нап ряжения смещения через первые и вторые замыкающие контакты поляризованного реле подключены ко второму и третьему входам электрогидроусилителя, второй выход и второй вход интегратора соединены между собой че рез параллельно включенные третьи и четвертые контакты поляризованного реле ГЗ . Недостатком известного регулятора является его неэкономичность из-за наличия непроизводительного расхода рабочего тела (жидкости) и его низ кая надежность из-за возникновения автоколебаний. Цель изобретения. - повышение эко номичности и надежности регулятора. Поставленная цель достигается тем, что в регуляторе третий и четвертый выходы источника напряжения смещения через пятые и шестые замыкающие контакты поляризованного ре ле соединены с третьим и четвертыми входами поляризованного реле. На чертеже изображена блок-схема регулятора. Регулятор содержит электрогидравлическ.ий преобразователь-1 , двухкаскадный гидроусилитель 2, гйдродвигатель 3. интегратор , поляризованное реле 5 с замыкающими контакта ми 6-11, источник 12 напряжения смещения, формирователь 13 сигнала управления, электрогидравлический усилитель И, Регулятор работает следующим образом. При отсутствии на выходе формирователя 13 управляющего сигнала f(t) золотник гидроусилителя 2 перекрывает свои перепускные отверстия, пре дотвращая расход рабочей жидкости. При подаче на входы преобразователя 1 интегратора k и поляризованного реле 5 управляющего сигнала f{t) с выхода формирователя 13 золот ник гидроусилителя 2 переместится на величину, пропорциональную f(t) (при перемещении золотника на величину бо льшую зоны нечувствительности гидроусилителя 2 начнется перепуск жидкости), интегратор А начнет интегри.ровать. В момент времени, когда f(t)+x b, где сигнал на выходе иитеграгора, репе 5 начнет срабатывать, а через отрезок времени t, , рав1-1Ый времени запаздывания в срабатывании, реле 5 замкнет свои контакты 6,8,10. При замыкании контактов 6 подается ступенчатый сигнал, пропорциональный зоне нечувствительности гидроусилителя 2, с выхода источника 12 на вход преобразователя 1, В результате этого золотник гидроусилителя 2 дополнительно перемещается на величину, равную его зоне нечувствительности. При замыкании контактов 10 на вход поляризованного реле 5 подается ступенчатый сигнал atl(t). При замыкании контактов 8 шунтируется цепь обратной связи интеграТора , в результате чего сигнал на его выходе становится равным нулю. Расход жидкости будет происходить до тех пор, пока f(t) 0. При f(t) О расход жидкости прекращается, так как золотник перекрывает перепускные отверстия гидроусилителя 2. В момент времени, когда f(t) + + ari(t)mb, поляризованное реле 5 начнет отпускать, а через отрезок времени t запаз- дывания в отпускании поляризованного реле 5, реле разорвет скоммутированные цепи,, в результате чего золотник гидроусилителя 2 займет нейтральное положение, а интегратор 4 будет подготовлен к очередному циклу работы . Время запаздывания в отпускании реле выбирается из условия JQ7/tn , где tf,- время, .перемещения золотника гидроусилителя 2 на расстояние, равное его зоне нечувствительности при подаче на вход преобразователя ступенчатого сигнала, пропорционального зоне нечувствительности гидроусилителя 2. При смене полярности управляющего сигнала f(t) регулятор работает аналогично рассмотренному случаю. Однако при смене полярности цепи коммутируются контактами 7,9,П реле 5. Применение предлагаемого регулятора по сравнению с известным позволяет уменьшить расход энергии при работе за счет исключения непроизводительного расхода рабочей жидкости и за счет этого повысить экономичность регулятора примерно на 1%, исключить возможность возникновения субгармонического резонанса на частотах колебаний объекта и за счет этого повысить надежность регулятора примерно на 2,5j.
Формула изобретения
Регулятор, содержащий источник напряжения смещения, последовательно соединенные интегратор .и поляризованное реле, и последовательно соединенные формирователь сигнала управления, электрогидроусилитель и исполнительный гидродвигатель, причем /выход формирователя сигнала управления соединен с первым входом интегратора и вторым входом поляризованного реле, первый и второй входы источника напряжения смещения через первые и вторые замыкающие контакты поляризованного реле подключены ко второ му и третьему входам электрогидроусилителя, второй выход и второй вход интегратора соединены между собой через параллельно включенные третьи
И четвертые контакты поляризованного реле, отличающийся тем, что, с целью повышения экономичности и надежности регулятора, третий и четвертый выходы источника напряже.ния смещения через пятые и шестые замыкающие контакты поляризованно.го реле соединены с третьим и четвертыми входами поляризованного реле. t
Источники информации, принятые во внимание при экспертизе
кл. G 05 В 17/02, 1979.
кл. 235-150.2, опублик. 1977 (прототип).
