1
Изобретение относится к области машиностроения и может быть использовано при создании дистанционных манипуляторов.
Известно устройство для управления дистанционным манипулятором по основному авт. св. № 582960, содержащее последовательно соединенные электропривод, упругий элемент и датчик момента, датчик угла задающего органа, последовательно соединенные первый сумматор, усилитель, электрогидроусилитель, гидропривод и датчик давления, выход которого подключен к входу первого сумматора, последовательно соединенные датчик угла исполнительного органа и второй сумматор, выход которого через последовательно соединенные электропривод и датчик угла задающего органа подключен к второму входу второго сумматора, причем второй выход гидропривода соединен с входом датчика угла исполнительного органа, а выход датчика момента подключен к второму входу первого сумматора.
Недостатком известного устройства является низкое динамическое качество управления манипулятором, обусловленное наличием в контуре управления упругого элемента, расположенного между электроприводом и звеном задающего органа и представляющего собой колебательное звено.
Резкие, скачкообразные воздействия на упругий элемент со стороны электропривода, которые могут возникнуть в процессе работы, вызывают колебательные движения упругого элемента и соединенного с ним звена задающего органа. Колебания упругого элемента замеряются датчиком момента и поступают в канал управления исполнительным органом, вынуждая его соверщать нежелательные колебательные движения.
Цель изобретения - улучшение динамических характеристик устройства.
Это достигается тем, что в устройство введен корректирующий блок, входы которого соединены с выходами датчика момента и датчика угла задающего органа соответственно, а выход - с третьим входом второго сумматора.
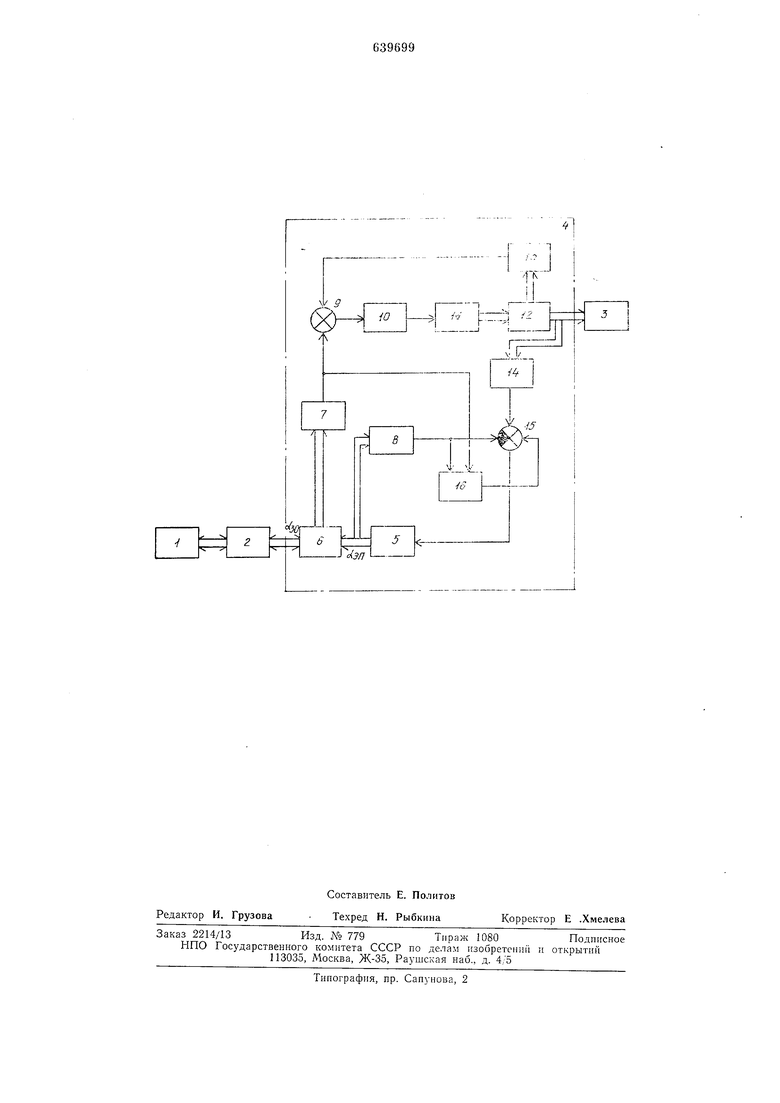
На чертеже представлена функциональная схема устройства для управления дистанционным манипулятором. На нем указаны оператор 1, звено 2 задающего органа, звено 3 исполнительного органа и устройство 4 для управления дистанционным манипулятором.
Устройство для управления дистанционным манипулятором содержит электропривод 5, упругий элемент 6, датчик 7 момента, датчик 8 угла задающего органа, первый сумматор 9, усилитель 10, электрогидроусилитель 11, гидропривод 12 и датчик 13 давления, датчик 14 угла исиолпительиого органа, второй сумматор 15, корректирующий блок 16.
Устройство работает следующим образом.
Оиератор 1, прикладывая силовое воздействие к звеиу 2. деформирует уиругий элемент 6. Деформация упругого элемента 6, пропорииопальиая разиости угловых положений звена 2 и выходиого вала электропривода 5 (озо-Оэп), замеряется датчиком 7 момента, выходной еигиал которого подается на вход первого сумматора 9 п гюрректирующий блок 16. На другой вход сумматора 9 поступает сигнал датчика 13 давления, иропорциональный нагрузке гидропривода 12. Сигнал с выхода сумматора 9 проходит на вход усилителя 10, вырабатывающего еигиал управления гидроприводом 12. Сигнал с выхода усилителя 10 поступает на электрогидроусилитель 11, преобразующий электрический сигнал в механическое перемещение золотника.
В соответствии с положением золотника электрогидроусилителя 11 в нолостях гидропривода 12 создается перепад давления, вызывающий перемещение выходного вала гндропривода 12 и закрепленного на нем звена 3 со скоростью, пропорциональной сигналу уиравления.
При иеремещении звена 3 датчик 14 угла вырабатывает сигнал, соответствующий угловому положению звена 3. Этот сигнал через второй сумматор 15 поступает на вход электропривода 5, вызывая иеремещение его выходного вала. Положение выходного вала электропривода 5 (аэп) замеряется
датчиком 8 угла, выходной еигиал которого поступает на другой сумматора 15, охватывая гидропривод 12 обратной отрицательной связью но положению, и корректнрующий блок 16.
Корректирующий блок 16 осуществляет суммирование сигналов датчика 7 момента н датчика 8 угла и дифференцирование полученной суммы. Суммарный сигнал датчнков 7 и 8 пропорционален угловому положению звена 2 («зо-«э11 + аоп Озо), а производная от суммарного сигнала пропорциональна угловой скорости звена 2.
Сигнал, соответствующий скорости звена
2, с выхода корректирующего блока 16 постунает на третий вход сумматора 15, охватывая гидропривод 12 обратной отрицательиой связью по скорости звена 2.
Обратная отрица1ельная связь по скоростн звеиа 2 обеспечивает демпфирование колебаний упругого элемента 6 без участия оператора 1, что повышает динамическое качество управлеиня манипулятором.
Формула изобретения
Устройство для управления дистанционным манипулятором по авт. св. ° 582960, отлпчающееся тем, что, с целью улучшения динамических характернетик устройства, оно содержит корректирующий блок, входы которого соединены е выходами датчика момента и датчика угла задающего органа соответетвенно, а выход - с третьим входом второго сумматора. Источиики информании,
нринятые во внимание ирн эксиертизе 1. Авторское свидетельство СССР о 582960, кл. В 25J 13/00, 01.03.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Устройство для управления дистанционным манипулятором | 1978 |
|
SU737917A2 |
| Устройство для управления дистанционным манипулятором | 1983 |
|
SU1095129A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU950519A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1061987A2 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| Устройство для управления дистанционным манипулятором | 1985 |
|
SU1313692A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1033308A2 |