триггера 25 с прямым и инверсным выходами, подключенными к первым входам элементов И П-1, 11-2 соответственно. Вторые входы компараторов 23, 24 соединены с выходами сумматоров (с) 17, 16 соответственно. На первый вход С 17 поступает сигнал с .интегратора 13, а на первый вход С 18 - сигнал с интегратора 14. Вторые входы С 17, 16 подключены к выходу блока 18. Р 12 формирует импульсы напряжения на основном выходе триггера 25, соответствующие интервалам управления для полюса положительной полярности, сдвинутые в сторону опережения о носитель91но соответствующих разрешенных интервалов на угол .с независимо от частоты вращения. Импульсы напряжения на инверсном выходе триггера соответствуют интервалам управления для полюса отрицательной полярности. Эти напряжения с выходов триггера являются разрешающими сигналами, соответствующими сдвинутым интервалам управления и переключающими Ф 3, 4. Датчик 7, узел 8, преобразователь 9 и элемент НЕ 10 служат для формирования сигнала, запрещающего прохождение запусканвдих импульсов в Ф 3 в случае превьшения пускового тока заданного значения. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Электропривод переменного тока | 1987 |
|
SU1529392A1 |
| Способ регулирования частоты вращения ротора вентильного электродвигателя | 1990 |
|
SU1721774A1 |
| Устройство для пуска синхронной машины, преимущественно асинхронизированной | 1986 |
|
SU1494183A1 |
| Вентильный двигатель | 1988 |
|
SU1594658A1 |
| Источник постоянного тока для дуговой сварки | 1985 |
|
SU1260131A1 |
| Устройство для реверса асинхронного частотно-регулируемого электродвигателя | 1983 |
|
SU1418881A1 |
| Электропривод переменного тока | 1988 |
|
SU1603515A1 |
| Устройство для управления регулируемым мостовым инвертором | 1988 |
|
SU1548830A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
Изобретение относится к электротехнике, в частности к области регулируемого электропривода с синхронными электродвигателями и непосредственными преобразователями частоты, и может быть использовано для пуска мощных синхронных машин от сети 50 Гц.
Целью изобретения является улучщение условий пуска путем увеличения среднего вращающего момента в области синхронной частоты вращения и уменьшения продолжительности пуска.
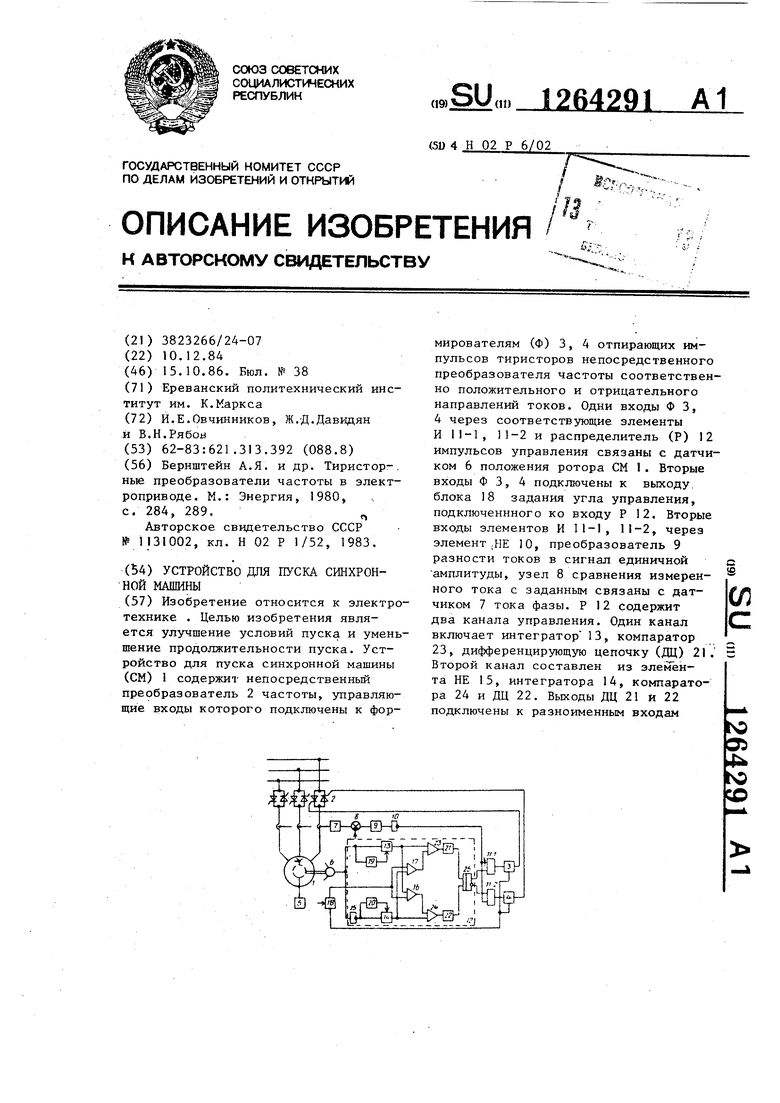
На чертеже приведена электрическая структурная схема устройства для пуска синхронной мащины.
Устройство для пуска синхронной машины 1 содержит непосредственньш преобразователь 2 частоты, формирователи отпирающих импульсов тиристоров преобразователя 3 и 4 соответственно положительного и отрицательного направления токов, возбудитель, 5постоянного тока, датчик 6 положения ротора, в цепи каждой фазы мапшны датчик 7 тока фазы, узел 8 сравнения измеренного тока с заданным током, преобразователь 9 разности токов в сигнал единичной амплитуды, элемент НЕ 10, два элемента И 11-1, 11-2, атакже распределитель 12 импульсов управления, содержаАий интеграторы 13 и 14; элемент
НЕ 15, два сумматора 16 и 17 напряжений, блок 18 задания угла управления, четыре дифференцирующих цепочки 19 - 22, два компаратора 23 и 24 и триггер 25.
Непосредственный преобразователь 2 частоты формирует импульсы тока, протекающие в якорньк обмотках синхронной машины. Питание преобразователя осуществляется от трехфазной нерегулируемой сети 50 Гц. Импульсы тока синхронизированы с положением ротора посредством датчика 6 поло-
жения ротора, который запускает формирователи отпирающих импульсов тиристоров преобразователя 3 и 4 соответственно положительного и отрицательного направления токов в соответствии с положением ротора. Индуктор синхронной машины возбуждается отдельным возбудителем 5 постоянного тока. , Назначение элементов 7-10 заключается в формировании
запрещающего сигнала, который запрещает прохождение запускающих, импульсов в формирователи. . Длительность запрещакяцего сигнала пропорциональна разности среднего значения пускового
тока и заданного тока якоря, когда пусковой ток превосходит заданный ток.
Устройство для пуска синхронной йашины работает следующим обраяом. На выходе датчика положения ротора вырабатьшаются прямоугольные импульсы единичной амплитуды и паузы длительности которых равны длительностям разрешенных интервалов. Импульс соответствует разрешенному интервалу для полюса положительной полярности (положительный разрешенньш интервал). Пауза соответствует разрешенному интервалу для полюса отрицательной полярности (отрицательный разрешенный интервал). Эти прямоугольные импульсы дифференцируются узлом 19, где выделяется дифференцированный сигнал положительной полярности, соответствующий переднему фро ту сигнала датчика положения ротора, т.е. моменту начала разрешенного интервала. Далее сигнал датчика положения ротора интегрируется первым интегратором 13, на выходе которого вырабатывается напряжение, величина которого определяет относительное угловое положение ротора. Линейно возрастающий участок характе ристики на протяжении импульса (поло жительного разрешенного интервала) характеризует текущее время в течение разрешенного интервала. По завершении импульса (положительного разрешенного интервала) напряжение на выходе интегратора 13 остается постоянным на протяжении паузы - горизонтальный участок характеристики Ордината горизонтального участка характеризует запомненную длительг ность предыдущего разрешенного интервала. По завершении паузы в момент начала следующего положительного разрешенного интервала производит ся сброс интегрированного напряжения до нуля и далее процесс интегрирования повторяется. Сброс производится дифференцированным сигналом положительной полярности, который от дифференцирующего узла 19 поступает на интегратор 13 в начале каждого следующего разрешен ного интервала. Напряжение с выхода датчика 6 положения ротора по параллельной цепи инвертируется злементом НЕ 15, в результате чего паузд обращается в сигнал единичной ампли туды, а сигнал в паузу. Это дает возможность интегрировать сигнал и определять относительное угловое положение ротора также на отрицатель ном разрешенномИнтервале. Этот сигнал дифференцируется дифференцирующим узлом 20, где выделяется дифференцирО ванный сигнал положительной полярности, соответствующий переднему фронту отрицательного разрешенного интервала. Инвертированный сигнал с выхода элемента НЕ 15 интегрируется вторым интегратором 14, Аналогичным образом производится запоминание длительности предыдущего разрешенного интервала и последующий сброс посредством дифференцирующего 20. Разность ординат горизонтального участка (длительность предыдущего разрешенного интервала) и нарастающего линейного участка (текущее время дв1гаения ротора в течение раз-решенного интервала) представляет собой относительное время, которое осталось пройти полюсу до окончания разрешенного интервала (при условии. что длительность текущего разрешенного интервала равна длительности предьщущего разрешенного интервала). Это время исчисляется в относительных долях длительности разрешенного интервала - ординаты горизонтального участка, принятой за единицу, так. как масштаб времени интегральной характеристики зависит от скорости вращения ротора. Нарастающий линейный участок достигает ординаты горизонтального участка (пересекает горизонтальный участок) в конце текущего разрешенного интервала. Если текущую интегральную характеристику переместить параллельно оси абсцисс вверх на заданную величину, пропорциональную углу (времени) опережения Т, то ее линейный участок пересечет горизонтальный участок характеристики предьщущего интервала (от параллельного канала) раньше момента окончания разрешенного интервала на время Г . Таким образом, момент времени пересечения будет опережать конец текущего разрешенного интервала, или на чало следующего разрешенного интервала на заданную величину . Причем этот временной сдвиг будет абсолютHbw, равным заданному времени независимо от частоты вращения. Зафиксированные таким образом моменты времег ни в каждом разрешенном интервале представляют собой начала интервалов управления, которые сдвинуты в сторону опережения относительно разреSшенных интервалов на эаданньш угол независимо, от частоты вращения. Величина этого сдвига задается величиной перемещения характеристики вдоль оси ординат. Вертикальное перемещение интегральной характеристики эквивалентно суммированию с ней постоянного управляющего напряжения ус-танки U|j . Суммирование напряжения уставки и ц с интегральной характеристикой выполняется в сумматорах 16 и 17 На одни входы этих сумматоров подают ся интегрированные напряжения соответственно положительного и отрицательного разрешенных интервалов (соответственно с выходов интеграторов 13 и 14), а на другие входы - напряжение О „ с выхода блока 18 задания угла управления. Изменением напряжения Uq можно регулировать величину сдвига интервалов управления. Величина сдвига интервалов управления зависит от заданного угла управления тиристоров ей . В данном устройстве пуска интервал управления сдвигается в сторону опережения относительно разрешенного интервала на угол ( ei . Сдвиг осуществляется автоматически системой управления при задании угла управления независимо от частоты вра щения ротора. Угол управления c«S регу лирует длительность и амплитуду импульсов, следовательно средний мо- . мент и темп nycjja. Угол управления об и темп пуска задаются блоком 18 задания угла управления. При этом с вы хода блока 18 на формирователи отпирающих импульсов тиристоров преобразователя 3 и 4 подается соответствующее управляющее напряжение, пропорциональное углу управления сл . Одновременно с этим с другого вьпсода блока 18 на сумматоры 16 и 17 подает ся управляющее напряжение, пропорцио нальное углу сдвига интервала управления, т.е. пропорциональное тому же углу управления U kt ko6. В первом компараторе 23 напряжение с выхода сумматора 17 сравнивается с запомненным уровнем напряжения положительного разрешенного интервала с выхода интегратора 13. Соответственно во втором компараторе 24 напряжение с выхода сумматора 16 сравнивается с запомненнымуровнем напряжения отрицательного разре9шенного интервала с выхода интегратора 14. Когда -напряжение с выхода сумматора превьшает напряжение интегральной характеристики параллельного канала, на выходе соответствующего компаратора 23 или 24 возникает сигнал единичной амплитуды. Далее эти прямоугольные сигналы дифференцируются соответственно дифференцирующими цепочками 21 и 22, где вьщеляются дифференцированные сигналы положительной полярности, соответствующие передним фронтам сигналов. Этими дифференцированными сигналами переключается триггер 25, Импульсы напряжения на основном выходе триггера соответствуют интервалам управления для полюса положительной полярности, которые сдвинуты в сторону опережения относительно соответствующих разрешенных интервалов на угол о независимо от частоты вращения. Импульсы напряжения на инверсном выходе триггера соответствуют интервалам управ- ления для полюса отрицательной полярности. Эти напряжения с выходов триггера являются разрешающими сит- налами, которые соответствуют сдвинутьи4 интервалам управления и которьми переключаются каналы формирования отпирающих .импульсов тиристоров положительного (элементы 1-1,3) или отрицательного (элементы 11-2,4) направления тока. Формула изобретения Устройство для пуска синхронной машины, содержащее непосредственньй преобразователь частоты с естественной коммутацией, подключенный к сети переменного тока, выход которого соединен с якорной обмоткой синхронной машины через датчики тока фазы а управляющие входы тиристоров каждой фазы соединены с соответствующими выходами формирователей отпираю щих импульсов, первые входы которых соединены с выходами элементов И, а вторые входы - с выходом блока задания угла управления, датчик положения ротора синхронной машины, выходы которого пофазно связаны с соответствующими входами распределителя импульсов управления, выходы которого соединены с первыми входами элементов И, вторые входы которых соединены с выходом преобразователя разнос7 12642 ти токов в сигнал единичной амплитуды, вход которого подключен к выходу датчика тока фазы через узел оравнения, опорньй вход которого подключей к блоку задания тока якоря, от-5 личающееся тем, что, с целью улучшения условий пуска путем увеличения среднего вращающего момента в области синхронной частоты вращения и уменьшения продолжительное-О ти пуска, распределитель импульсов управления в каждой фазе выполнен двухканальным с инвертирук1щим и неинвертируннцим входами,в него введены два интегратора, входы Сброс 15 которых соединены с основными входами через дифференцирующие цепи, два сумматора, два компаратора и триг918гер, раздельные входы которого соединены соответственно с выходами пер вого и второго компараторов через дифференцирующие цепи, одни входы компараторов соединены с выходами первого и второго интеграторов, причем другие входы первого и второго компараторов соединены соочветственно с выходами первого и второго сумт маторов, первые входы которых соединены перекрестно с выходами второго и первого интеграторов, а вторые их входы соединены с выходом блока задания угла управления, при этом каждая фаза непосредственного преобразователя частоты с естественной коммутацией выполнена в виде встречнопараллельно включенных тиристоров.
| Бернштейн А.Я | |||
| и др | |||
| Тиристорные преобразователи частоты в элект роприводе | |||
| М.: Энергия, 1980, с | |||
| СЧЕТНЫЙ ДИСК ДЛЯ РАСЧЕТА СОСТАВНЫХ ЧАСТЕЙ ПИЩИ | 1919 |
|
SU284A1 |
| Устройство для пуска синхронной машины | 1983 |
|
SU1131002A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
