1
Изобретение отноеится к землеройным кашипам, а именно к одноковшовыу, гидрав.|ическим экскаватором с ком1 ;1ектом взаимозаменяемых сменных рабочих органов.
Цель изобретения --- иовьпиение производите.;1ьности путем сокращения 13ремени на :мену рабочих органов.
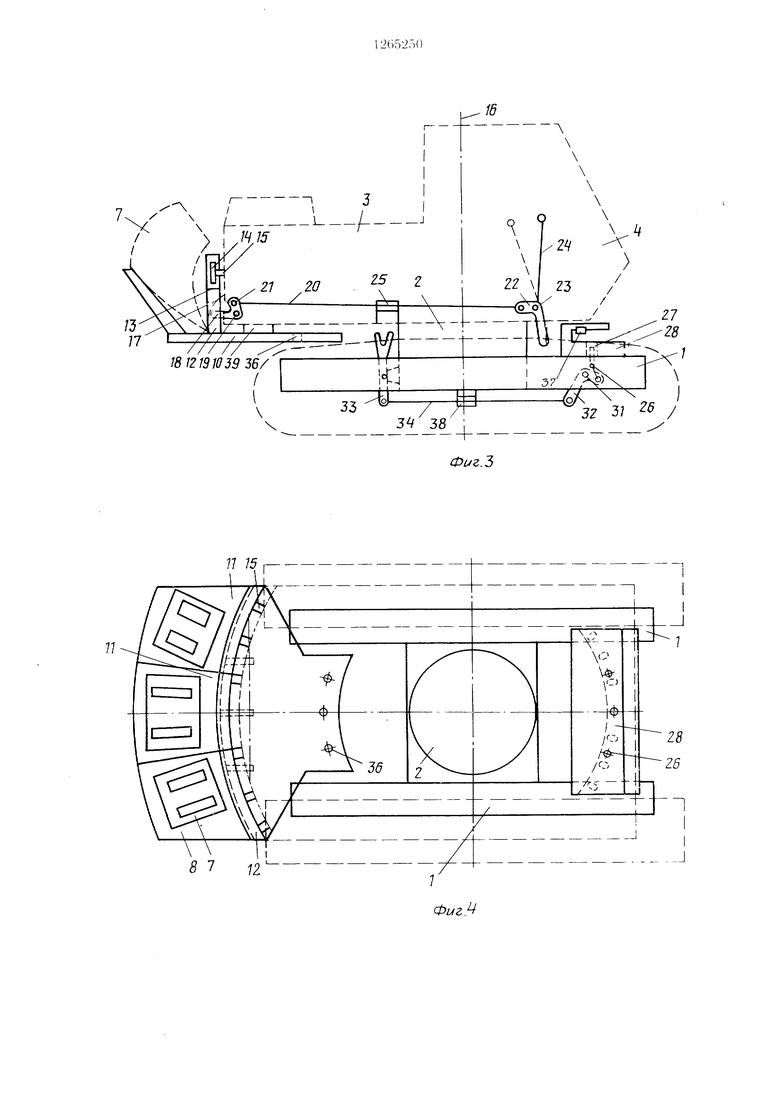
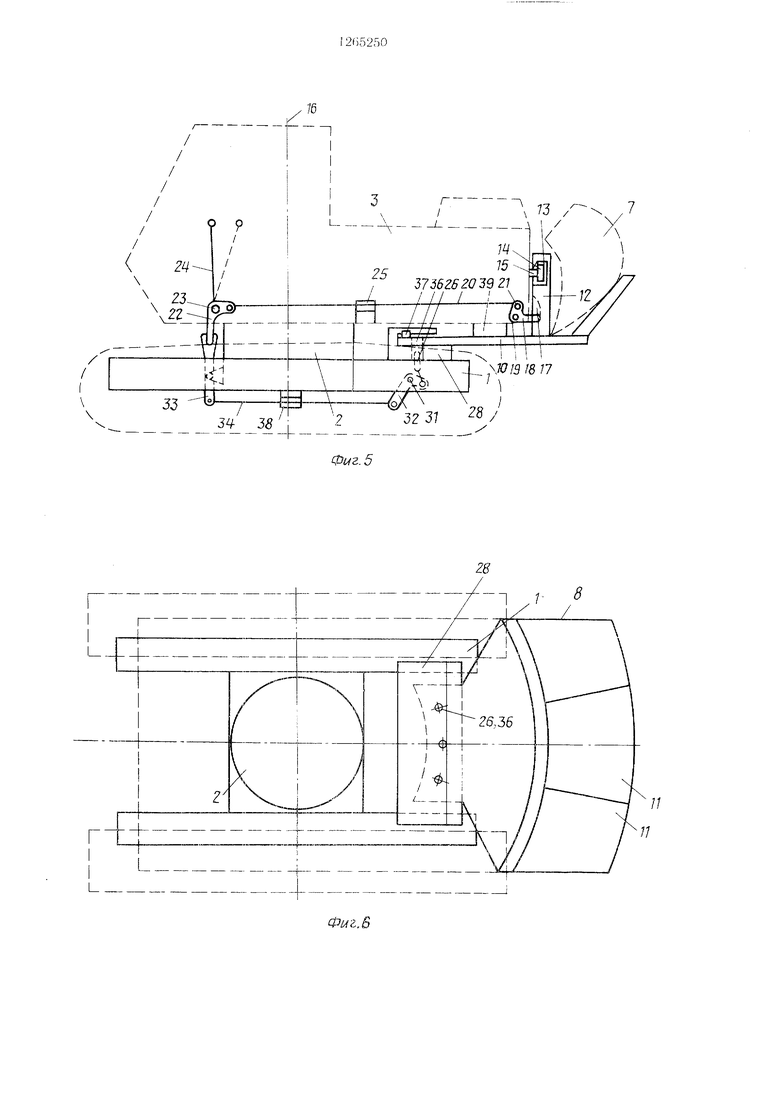
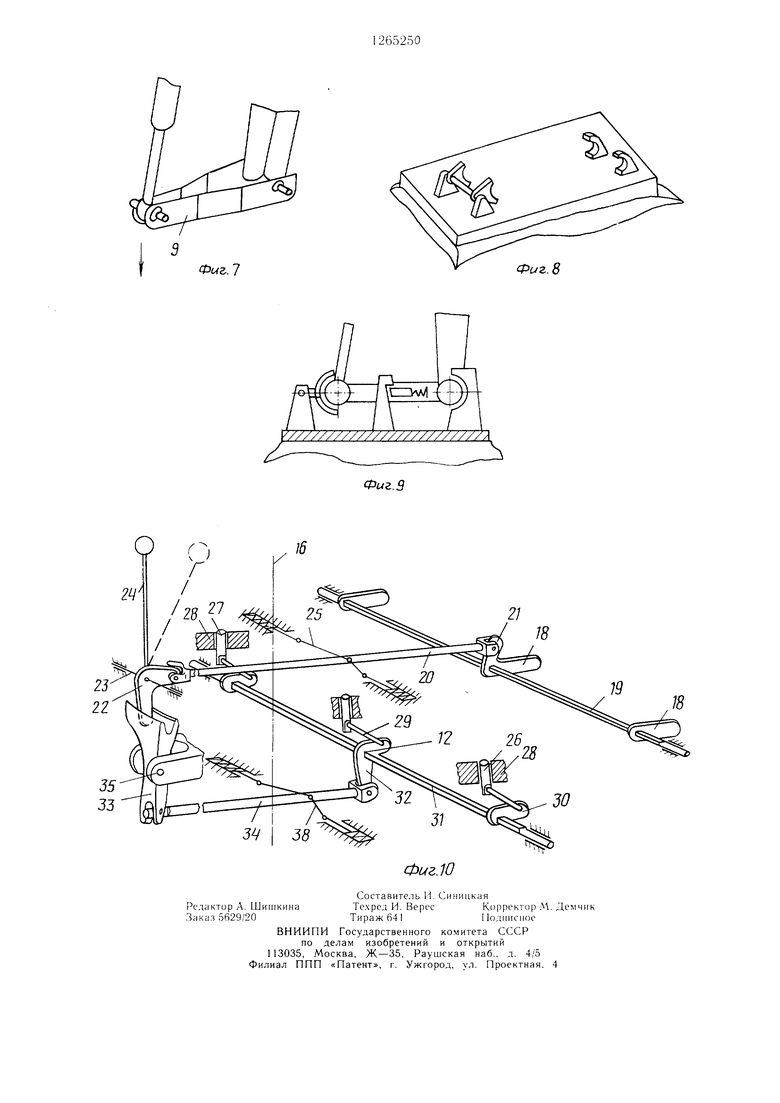
На фиг. 1 и 2 изображен - KCKaLijrrop, вид сбоку; на . 3 соединение секции с поворотной нлатформой, вид сбоку; на фи1-. 4 -- то же, вид в нлане; на фиг. 5 соединение секций с рамой тележки; на с|)иг. 6 -- то же, вид в нлане; на фиг. 7- 9 - узлы соедине1-ия рукоятки со с.менны.ми рабочими органа.ми; на фиг. 10 кинематическая схема механи: ма фиксации секций.
Экскаватор состоит из хо.довой тележки I с )амой, HOBopoTHOio K)yia 2, и.1атформь 3 и кабины 4. На нлатформе смоншрованы стрела 5, рукоять 6 со сменным рабочи.м opiaHOM 7 и противовес 8. Рукоять 6 имеет узел 9 д;1я крепления сменных рабочих opi-анов. В качестве противовеса 8 иснол|1зуется плита 10 со съемными полыми секциями 11 со сменными рабочими органами 7. (/генки 12 каждой секции II имеют (})игу; ные радиусные пазы 13 для соединения с ответными роликами 14, закренленпыми isa н,1атформе 3 посредством осей 15 но радиусу относите.лыю оси 16 вран1ения платформы З. Стенки 12 каждой секции имеют также гнезда 17 соед1 нения е закрег1,;1енпы 1И на 1;1атформе 3 стопорами 18 механизма (1)иксации, которые жестко закренлен1 1 на оси 19, соединенной тягой 20 е рыча1ом 21 и Г-образпым pjjinaiOM 22, который CBsriari с н; атформой 3 11ос)едством оси 23 и и.мес- pi;.iчаг 24.
Тяга 20 имеет нружинные фи: ;сатор 1 25. Fia раме ходовой тележки 1 )ован1 1
зеугикальные CTOiiOpbi 26, расположенные в отвс1)стиях 27, BijHKXiHeHHbie в жестко закрепленном на раме захвате 28. Палец 26 кривон1ипа 29, кулачки 30, ва.ч 31, коромысла 32 связаны с концом новоротной вил ки 33 носредством тяги 34. Вилка 33 установлена па оси 35 и имеет в верхней части выполненный по радиусу относительно оси 16 наз для взаимодейетвия с Г-образпым рычагом 22. Плита 10 и.меет отве)0 стия 36 для соединения со стопорами 26. Захват 28 имеет паправляюпдие ролики 37, тяга 34 - нружиЕнный фиксатор 38. На н.латформе 3 закрен.чен унор 39.
Работа экскаватора заключаетея в следу кицем.
5Плита И) со сменными еекциями II соединяется с поворотной платформой 3, один из сменных рабочих органов соединяется с |)укоятью 6. В этом положении плита 10 и секции I 1 со сменными рабочи.ми органами выполняют функции противовеса.
Замена рабочих органов нроизводится и с л. еду К) щей носле.1овательности.
Поворотная п.латфор.ма 3 устапав;п-1вается так, что плита К) входит в захват 28, этом отверстии 27 и 36 сов.мен1аются. Поворотом )ычага 24 из одного фиксированного но;1оже:1ня к .тругое стопоры 2f) | ходят в отверстия 27 и t:T{) секции 11 относительно рамы ходовой те;1ежки i. Одновременно С;ог10)ы 18 вьгкодят из незд
0 17. После это1о 1:латформа 3 поворачивается на 180, смонтирован}1ый на рукояти fi рабочий opiaH укладьн ается в св()б(;дпук) секцию 11, а я: друго; секции рабочий о)-ан другого назначения соединяется е оукоятьн) 6. 3aTt- : секции отсоединяются or
ходовой тележкг 1 н с-юва осдиняются с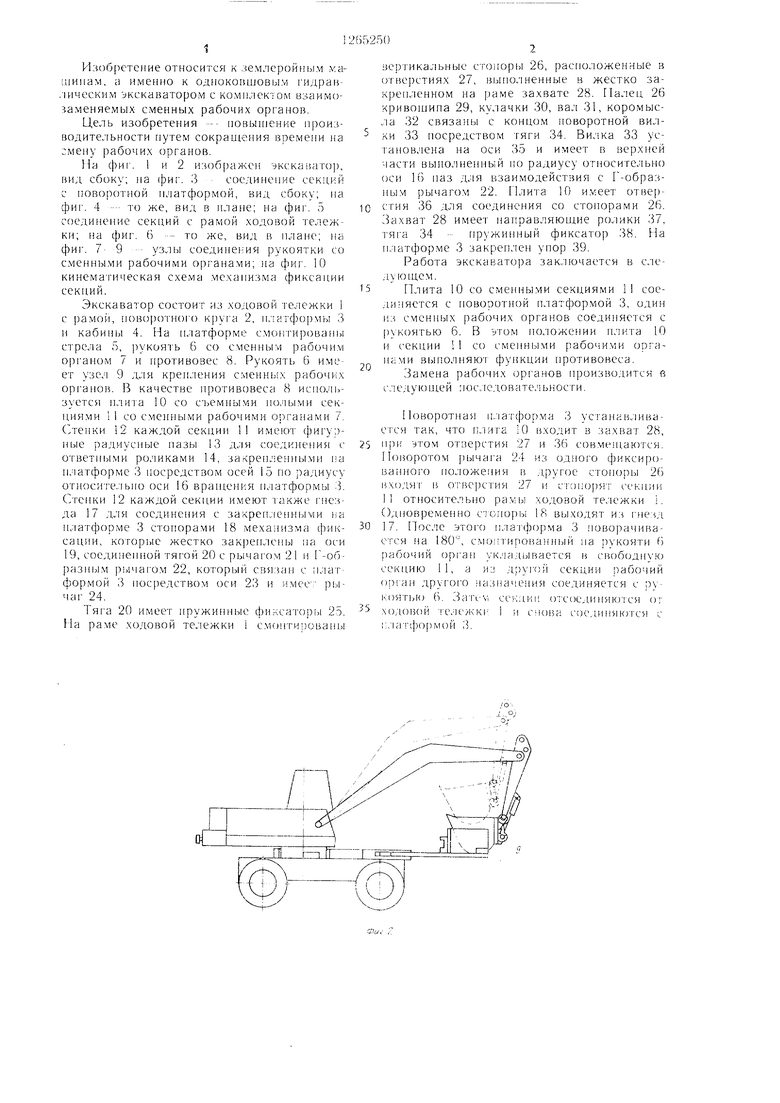
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой гидравлический экскаватор | 1985 |
|
SU1305258A2 |
| Землеройный комбайн | 1951 |
|
SU94259A1 |
| Самоходный гидравлический экскаватор | 1984 |
|
SU1313956A1 |
| Экскаватор непрерывного действия | 1988 |
|
SU1602928A1 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| ЭКСКАВАТОР для РАЗРАБОТКИ СКАЛЬНЫХ ПОРОД | 1972 |
|
SU324346A1 |
| Экскаватор-драглайн для подводной разработки горных пород | 1984 |
|
SU1168673A1 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| МНОГОЦЕЛЕВОЙ МАНИПУЛЯТОРНЫЙ АГРЕГАТ | 1992 |
|
RU2016756C1 |
1. Многоцелевой гидравлический экскаватор, включающий смонтированную на раме ходовой тележки поворотную платформу со стрелой и рукоятью, которая имеет узел для соединения ео сменными рабочими органами, и комплект сменных рабочих органов с ответными узлами для соединения с рукоятью, отличающийся тем, что. с целью ; / 8 повышения производительности путем сокращения времени на смену рабочих органов, он снабжен полыми секциями, в полостях которых расположены рабочие органы с возможностью их попеременного соединения с рукоятью, при этом секции имеют стопорные узлы для попеременного стопорения относительно новоротной п,1атформы со стороны, противоположной стреле, и относительно рамы ходовой тележки посредством механизма фиксации. 2. Экскаватор по и. 1, отличающийся тем, что механизм фиксации выполнен из механических стопоров,одни из которых смонтированы на поворотной платформе, а - па раме ходовой те,, при этом стопоры расположены с возможностью их взаимодействия со стопорными уз,1ами и между собой посредством кинема(Л тической связи с рычагом управления нри расположении стрелы в вертика,1ьно11 n;iocкости, проходящей через ось продо,1ьно(1 симметрии ходовой тележки. o о ел ю ел о 
/
Я
}
2
25 2
ZZ
27 -28
33
П
7« 32 3/ 25 у
J 38
Фиг.5
Фиг. 15,
J 8 23231 28 У
I
. 5
Фмг. 7
| Устройство для крепления рабочего органа гидравлического экскаватора | 1976 |
|
SU618501A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Рабочее оборудование одноковшового экскаватора | 1974 |
|
SU604911A2 |
