Изобретение относится к горному машиностроению, а именно к экскаваторам непрерывного действия для открытых горных работ.
Цель изобретения - повышение .произ- водительности и увеличение высоты копания при расширении технологических возможностей.
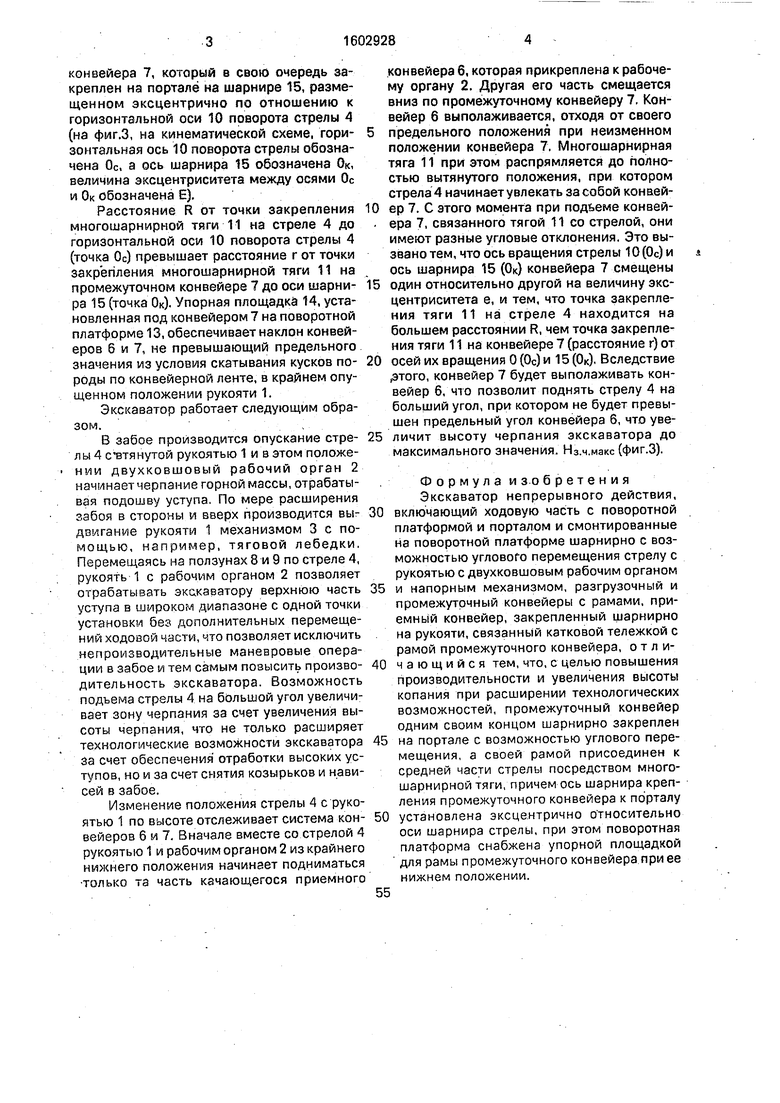
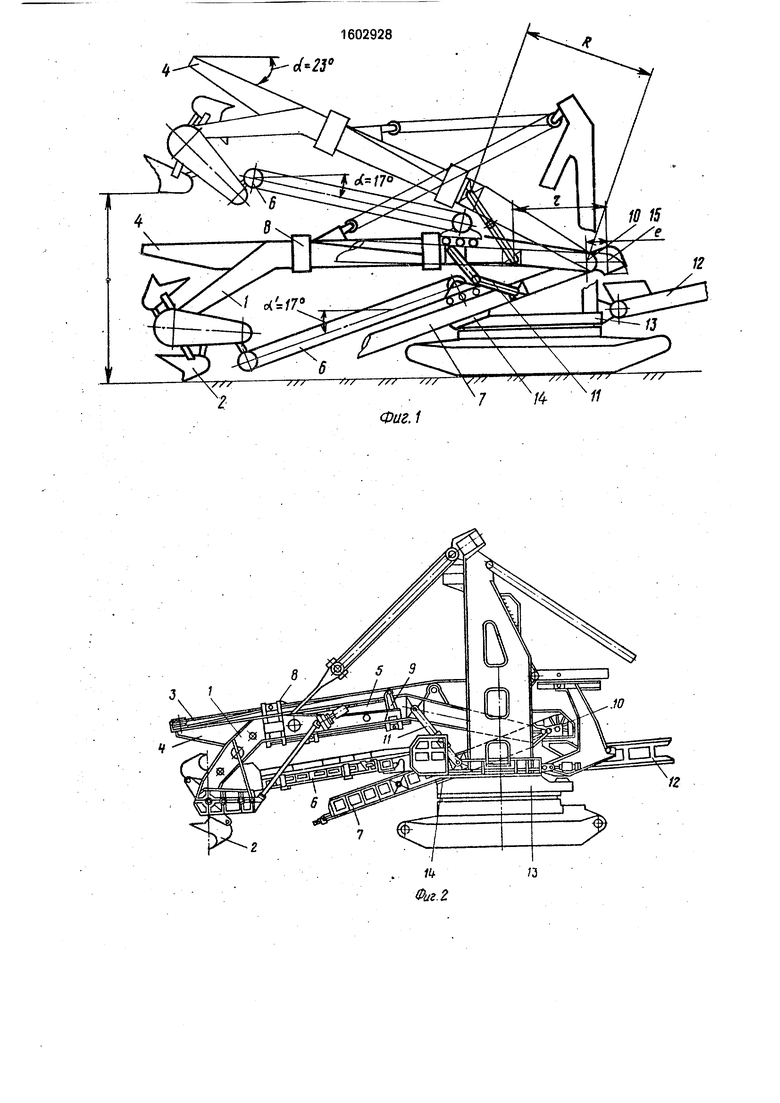
На фиг. 1 представлена принципиальная схема данного экскаватора непрерывного действия для разработки взорванных скальных пород; на фиг .2 - экскаватор с промежуточным положением приемного конвейера; на фиг.З - упрощенная кинематическая схема данного экскаватора.
Экскаватор включает рукоять 1 с двух- ковшовым рабочим органом 2 и напорным
механизмом 3 рукояти, выполненным в виде системы тросов и блоков, либо в виде силового цилиндра, либо в виде реечного зацепления, и стрелу 4 с направляющими параллелями 5. Экскаватор имеет качрю- щийся приемный 6 и промежуточный 7 конвейеры. Крепление рукояти Т к стреле 4 выполнено из двух ползунов 8 и 9. причем ползун 9 установлен в задней части, а ползун 8 - в средней части рукояти 1. Стрела 4 шарнирно закреплена на портале с горизонтальной осью 10 поворота. Промежуточный конвейер 7 прикреплен к стреле 4 посредством многошарнирной тяги 11. Отвальный конвейер 12 закреплен на поворотной платформе 13. На ней же установлена упорная площадка 14 для опирания промежуточного
Оч
о
ч О О 00
конвейера 7, который в свою очередь закреплен на портале на шарнире 15, размещенном эксцентрично по отношению к горизонтальной оси 10 поворота стрелы 4 (на фиг.З, на кинематической схеме, горизонтальная ось 10 поворота стрелы обозначена Ос, а ось шарнира 15 обозначена Ок, величина эксцентриситета между осями Ос и Ок обозначена Е),
Расстояние R от точки закрепления многошарнирной тяги 11 на стреле 4 до горизонтальной оси 10 поворота стрелы 4 (точка Ос) превышает расстояние г от точки закрепления многошарнирной тяги 11 на промежуточном конвейере 7 до оси шарнира 15 (точка Ок). Упорная площадка 14, установленная под конвейером 7 на поворотной платформе 13, обеспечивает наклон конвейеров 6 и 7, не превышающий предельного значения из условия скатывания кусков породы по конвейерной ленте, в крайнем опущенном положении рукояти 1.
Экскаватор работает следующим образом. . В забое производится опускание стрелы 4 с втянутой рукоятью 1 и в этом положении двухковшовый рабочий орган 2 начинает черпание горной массы, отрабатывая подошву уступа. По мере расширения забоя в стороны и вверх производится выдвигание рукояти 1 механизмом 3 с помощью, например, тяговой лебедки. Перемещаясь на ползунах 8 и 9 по стреле 4, рукоять 1 с рабочим органом 2 позволяет отрабатывать экакаватору верхнюю часть уступа в широком диапазоне с одной точки установки без дополнительных перемещений ходовой части, что позволяет исключить непроизводительные маневровые операции в забое и тем самым повысить производительность экскаватора. Возможность подъема стрелы 4 на большой угол увеличивает зону черпания за счет увеличения высоты черпания, что не только расширяет технологические возможности экскаватора за счет обеспечения отработки высоких уступов, но и за счет снятия козырьков и нависей в забое..
Изменение положения стрелы 4 с рукоятью 1 по высоте отслеживает система конвейеров 6 и 7. Вначале вместе со стрелой 4 рукоятью 1 и рабочим органом 2 из крайнего нижнего положения начинает подниматься только та часть качающегося приемного
конвейера 6, которая прикреплена к рабочему органу 2, Другая его часть смещается вниз по промежуточному конвейеру 7. Конвейер 6 выполаживается, отходя от своего
предельного положения при неизменном положении конвейера 7, Многошарнирная тяга 11 при этом распрямляется до полностью вытянутого положения, при котором стрела 4 начинает увлекать за собой конвей0 ер 7. С этого момента при подъеме конвей- . ера 7. связанного тягой 11 со стрелой, они имеют разные угловые отклонения. Это вызвано тем, что ось вращения стрелы 10 (Ос) и ось шарнира 15 (Ок) конвейера 7 смещены
5 один относительно другой на величину эксцентриситета е, и тем, что точка закрепления тяги 11 на стреле 4 находится на большем расстоянии R, чем точка закрепления тяги 11 на конвейере 7 (расстояние г) от
0 осей их вращения О (Ос) и 15 (Ок). Вследствие ,этого, конвейер 7 будет выполаживать конвейер б, что позволит поднять стрелу 4 на больший угол, при котором не будет превышен предельный угол конвейера б, что уве5 личит высоту черпания экскаватора до максимального значения. Нз.ч.макс (фиг.З).
Формула изобретения Экскаватор непрерывного действия, 0 включающий ходовую часть с поворотной платформой и порталом и смонтированные на поворотной платформе шарнирно с возможностью углового перемещения стрелу с рукоятью с двухковшовым рабочим органом
5 и напорным механизмом, разгрузочный и промежутрчный конвейеры с рамами, при- емнУй конвейер, закрепленный шарнирно на рукояти, связанный катковой тележкой с рамой промежуточного конвейера, о т л и40 чающийся тем, что, с целью повышения производительности и увеличения высоты копания при расширении технологических возможностей, промежуточный конвейер одним своим концом шарнирно закреплен
45 на портале с возможностью углового перемещения, а своей рамой присоединен к средней части стрелы посредством многошарнирной тяги, причем ось шарнира крепления промежуточного конвейера к порталу
50 установлена эксцентрично относительно оси шарнира стрелы, при этом поворотная платформа снабжена упорной площадкой для рамы промежуточного конвейера при ее нижнем положении.
55
1602928
| название | год | авторы | номер документа |
|---|---|---|---|
| СМЕННОЕ РАБОЧЕЕ ОБОРУДОВАНИЕ ТИПА ПРЯМОЙ ЛОПАТЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU239130A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2577870C2 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Экскаватор-драглайн для подводной разработки горных пород | 1984 |
|
SU1168673A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 1990 |
|
RU2023113C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| Экскаватор | 1986 |
|
SU1362789A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ КАРЬЕРНОГО ЭКСКАВАТОРА | 2014 |
|
RU2573143C1 |
Изобретение относится к горному машиностроению, а именно к экскаваторам непрерывного действия для открытых горных работ. Цель - повышение производительности и увеличение высоты копания при расширении технологических возможностей. Экскаватор включает рукоять 1 с двухковшовым рабочим органом 2, механизм напора, стрелу (С) 4, приемный 6 и промежуточный конвейеры (ПК) 7. На портале поворотной платформы шарнирно закреплены С 4 и ПК 7 с возможностью их углового перемещения, при этом ось 15 шарнира ПК 7 эксцентрична оси 10 шарнира С 4. Посредством многошарнирной тяги 11 ПК 7 присоединен к С 4. При работе экскаватора подъем С 4 отслеживается ПК 6 и 7 и благодаря разным угловым перемещениям С 4 и ПК 7 происходит выполаживание ПК 6. Это позволяет поднимать С 4 на больший угол без достижения значений предельных углов для транспортирования породы по конвейерам. 3 ил.
Фиг. 1
Ж 4
Фиг.З
| Карьерная машина для разработки взорванных скальных пород | 1972 |
|
SU662718A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
| , Авторское свидетельство СССР № 275942, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
