Изобретение относится к механизации и автоматизации производственных процессов, в частности к механизмам позиционирования подвижных звеньев роботов, манипуляторов и подобных устройств, и может быть использовано в различных отраслях народного хозяй ства. Целью изобретения является упроще ние конструкции при увеличении числа точек позиционирования. На чертеже изображен механизм позиционирования робота, общий вид. Подвижное звено 1 установлено в корпусе 2 (выполнены из немагнитного материала). В верхней части корпуса 2 размещен источник 3 магнитного по ля (например,электромагнит). На подвижном звене в опорах 4 и 5 установлена пластина 6, выполненная из ферромагнитного материала (например, стали), при этом в ней имеется отвер стие 7, Механизм содержит также гибкие магнитопроводы 8 - 12 и выдвижные упоры 13 в корпусах 14. Под основанием корпуса подвижного звена расположены подвижный упор 15 с пружиной 16. и жестко закрепленный фик. сирующий упор 17. На корпусе 2 рас-, положен датчик 18 устройства управления перемещением пластины 6, взаимодействующий с упором 5, Механизм работает следующим образом. В исходном положении электромагнит 3 включен, пластина находится в положении, указанном на чертеже, При этом воздушный зазор между торцами магнитопроводов 9 - 12 и электромагнитом 3 перекрыт ферритовой частью пластины 6, а зазор между электромаг нитом 3 и магнитопроводом 8 совпадает с отверстием 7. Магнитоуправляемый вьщвижной упор 13, соединенный с рабочей зоной магнитопровода 8, выдвинут, а остальные упоры находятся во втянутом положении. Перемещение звена I вперед (напри мер, справа напево) осуществляется д тех пор, пока вьвдвинутый упор 13 маг нитопровода 8 не встретит подвижный упор 15, после чего оба упора переме щаются совместно, сжимая пружину 16 воздействуя упором 15 на шток тормозного золотника (не показан) и осу ществляя плавное торможение звена с последующей остановкой на жесткий упор 17. После выполнения роботом требуемой операции (например,захват 29 детали) звено 1 перемещается п исходное положение (слева направо) и воздействует на датчик 18, после чего управляющее устройство (не показано) передвигает пластину 6 в следующее положение (справа налево на расстояние а, располагая отверстие 7 между магнитопроводом 9 и электромагнитом 3), при этом выдвижной упор 13, расположенный в рабочей зоне магнитопровода 9, выдвигается в рабочее положение, остальные упоры втянуты. При последующем движении звена 1 вперед аналогично описанному осуществляется передвижение и остановка подвижного звена 1 в позиции, определяемой упором 13, управляемым магнитопроводом 9, и возврат звена в исходное положение. После окончания последнего цикла позиционирования, осуществляемого путем разрыва магнитной связи магнитопровода 12 и возврата подвижного звена 1 в исходное положение, устройство управления, получая очередной сигнал от датчика 18, перемещает пластину 6 в первоначальное положение, после чего механизм повторяет программу позиционирования. Предложенное устройство позволяет сократить количество звеньев кинематических цепей, упрощает конструкцию и снижает габариты устройства при увеличении числа точек позиционирования, расположение концов магнитопроводов со стороны электромагнита на равных расстояниях друг от друга упрощает конструкцию устройства программного управления за счет возможности управления идентичными сигналами независимо от характера размещения точек позиционирования, снижает металлоемкость робота в целом. Формула изобретения Механизм позиционирования робота, содержащий корпус, в котором с возможностью линейного перемещения установлено подвижное звено с регулируемыми упорами, и устройство управления выдвижением упоров, о т личающийся тем, что, с целью упрощения конструкции при увеличении числа точек позиционирования, он снабжен общим для всех упоров источником магнитного поля, при этом магнитная связь между упорами и источником магнитного поля производится посредством гибких магнитопроводов, а устройство управления выдвижением упоров, выполненное в виде пластины из ферромагнитного материала с отверстием, установлено в зазоре между источником магнитного поля и подвижным звеном с возможностью перемещения вдоль оси подвижного звена.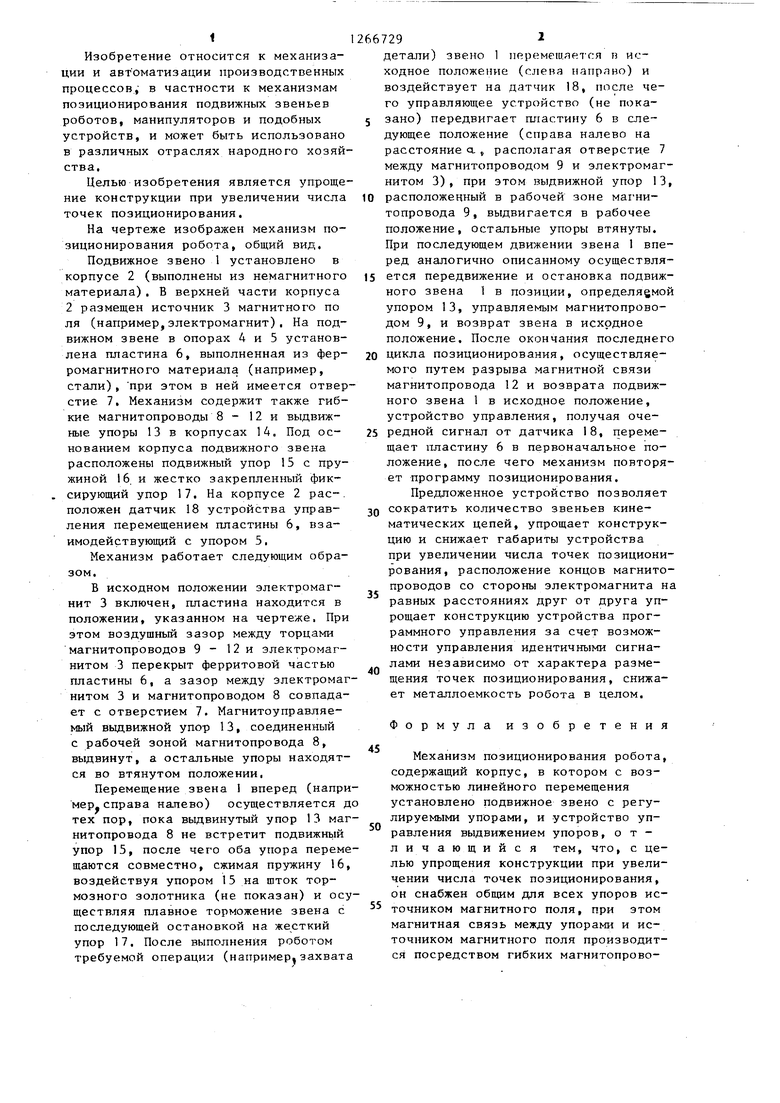
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1986 |
|
SU1397279A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227957C1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153758C1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| КОЛЛАБОРАТИВНОЕ СВАРОЧНОЕ УСТРОЙСТВО | 2024 |
|
RU2833865C1 |
Изобретение относится к механизмам позиционирования подвижных звеньев роботов, манипуляторов и подобных устройств и может быть использовано в различных отраслях народного хозяйства. Цель изобретения состоит в гпрощении конструкции при увеличении числа точек позиционирования. Механизм позиционирования робота снабжен общим для всех упоровисточником магнитного поля. Магнитная связь между упорами и источником магнитного поля осуществлена гибкими магнитопроводами. Устройство управления выдвижением упоров выполненное в виде пластины из ферромагнитного материала с отверстием, расположено в зазоре между источником магнитного поля и подвижным звеном с возможностью перемещения вдоль оси (Л подвижного звена. 1 ил.
| Механизм позиционирования робота | 1978 |
|
SU774939A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
