1
Изобретение относится к механизации и автоматизации производственных процессов, в частности к механизмам точного позиционирования подвижных звеньев роботов, манипуляторов и других устройств, и может быть использовано в различных отраслях народного хозяйства.
Известен робот РВ-50, содержгиций барабаны с упорами, которые ограничивают перемещения соответствукнцик звеньев руки робота .
Недостатком известной конструкции является ее сложность, низкая жесткость при длинных упорах и нгшичие зазоров в промежуточных передачах, что ведет к снижению точности позиционирования.
С целью упрощения конструкции по ышения точности позиционирования предложенный механизм позиционировайия робота снабжен расположенным параллелЬно подвижному звену робота винтом с установленными на нем регулируемыми упорами, а подвижное звено робота снабжено дополнительными упорами, один из которых в крайнем заднем положении кинематически связан с устройством поворота, причем часть регулируемых упоров расположена вперед, а часть - за одной из опор подвижного звена.
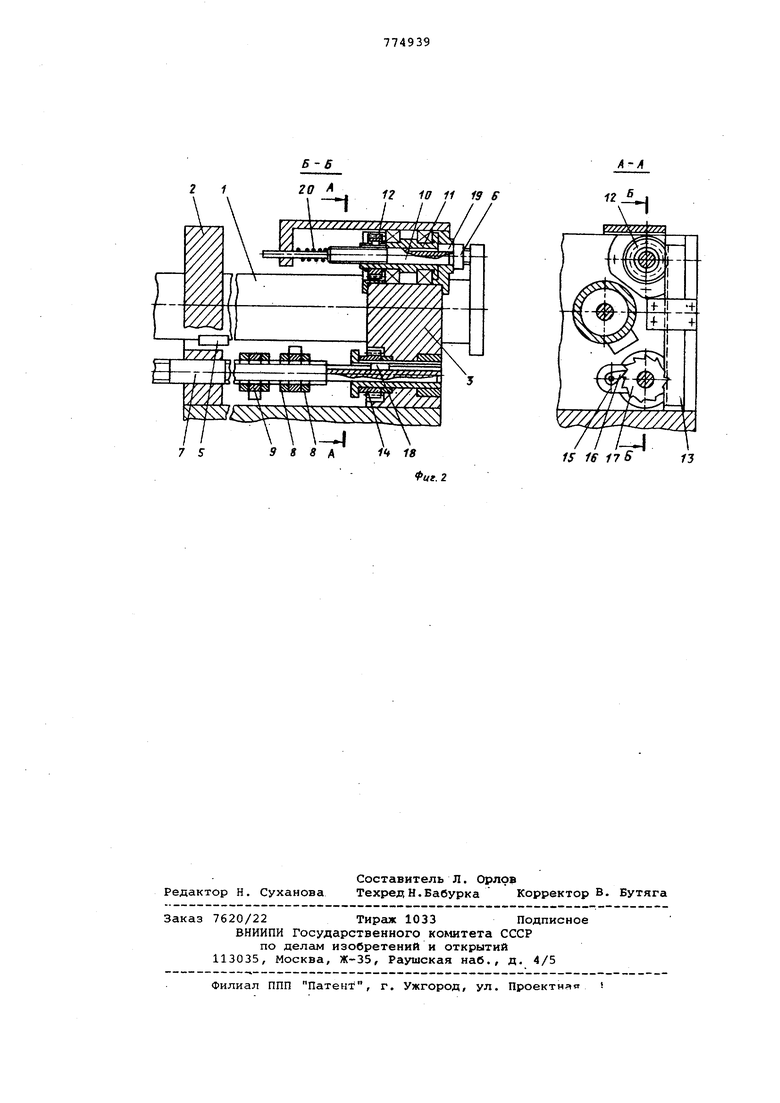
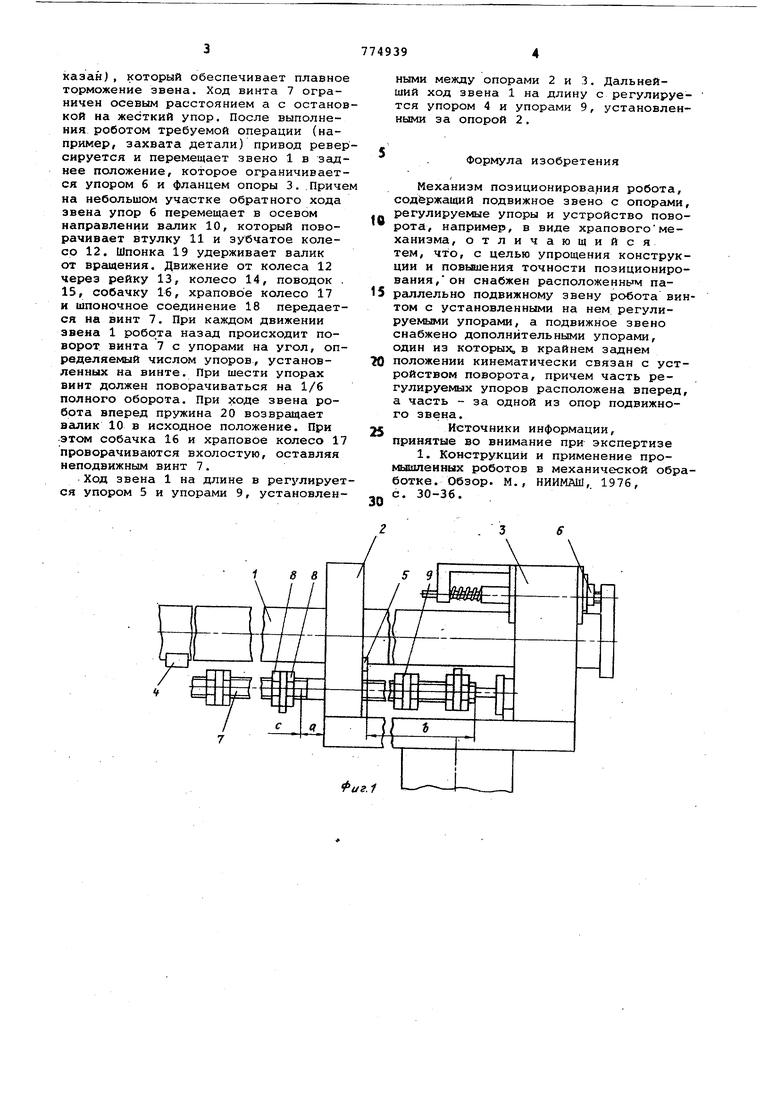
На фиг. 1 изображен механизм . позиционирования, общий вид; на 5 фиг. 2 - разрезы механизма.
Подвижное звено 1 робота установлено в опорах 2 и 3. На звене закреплены дополнительные упоры 4-6. В опорах 2 и 3 параллельно оси звена 1 установлен .-винт 7, на котором, располагаются регулируемые гайки 8 с регу.пируемыми упорами 9. Упор 6 с винтом 7 соединен через шлицевинтовую пару: валик 10 и втулку 5 11 г зубчатое колесо 12, рейку 13, зубчатое колесо 14, поводок 15, собачку 16, храповое колесо 17, шпоночное соединение 16. Валик 10 соединен с опорой 3 через.шпонку 19 и пружину 20 возврата.
Механизм работает следующим образом.
Перемещение звена 1 вперед (привод звена не показан) осуществляется 25 до тех пор, пока один из дополнительных упоров 4 или 5 не встретит выступ одного из регулируемых упоров 9. После чего винт 7 перемещается совместно со звеном 1, воздействуя при этом 30 на шток тормозного г-олотника (не показан), который обеспечивает плавное торможение эвена. Ход винта 7 ограничен осевым расстоянием а с остановкой на жесткий упор. После выполнения роботом требуемой операции (например, захвата детали) привод реверсируется и перемещает звено 1 в заднее положение, которое ограничивается упором 6 и фланцем опоры 3. . Приче на небольшом участке обратного хода эвена упор 6 перемещает в осевом направлении валик 10, который поворачивает втулку 11 и зубчатое колесо 12. Шпонка 19 удерживает валик от вращения. Движение от колеса 12 через рейку 13, колесо 14, поводок 15, собачку 16, храповое колесо 17 и шпоночное соединение 18 передается на винт 7. При каждом движении эвена 1 робота назад происходит поворот винта 7 с упорами на угол, определяемый числом упоров, установленных на винте. При шести упорах винт должен поворачиваться на 1/6 полного оборота. При ходе звена робота вперед пружина 20 возвращает валик 10 в исходное положение. При ЭТОМ собачка 16 и храповое колесо 17 проворачиваются вхолостую, оставляя неподвижным винт 7.
Ход звена 1 на длине в регулируется упором 5 и упорами 9, установленными между опорами 2 и 3, Дальнейший ход звена 1 на длину с регулируется упором 4 и упорами 9, установленными за опорой 2.
Формула изобретения
Механизм пoзициoниpoвa ия робота, содержащий подвижное звено с опорами, регулируемые упоры и устройство поворота, например, в виде храповогомеханизма, отличающийся тем, что, с целью упрощения конструкции и повьвиения точности позиционирования,он снабжен расположенным параллельно подвижному звену робота винтом с установленными на нем регулируемьали упорами, а подвижное звено снабжено дополнительными упорами, один из которых, в крайнем заднем положении кинематически связан с устройством поворота, причем часть регулируемых упоров расположена вперед, а часть - за одной из опор подвижного звена.
Источники информации, принятые во внимание при экспертизе 1. Конструкций и применение промышленных роботов в механической обработке. Обзор. М., НИИМАШ, 1976,
0 °-2 1 9 8 8 A 14 18 IS 16 176
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод исполнительного органа робота | 1982 |
|
SU1122501A1 |
| Привод робота | 1979 |
|
SU901675A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| Прокатно-ковочный стан | 1988 |
|
SU1547891A1 |
| Механизм позиционирования робота | 1978 |
|
SU716808A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1395343A1 |
| Устройство для нанесения клея на кромки обувных деталей | 1988 |
|
SU1574202A1 |
| Многошпиндельная делительная головка | 1961 |
|
SU144699A1 |
| Устройство для настилания круглого трикотажного полотна | 1986 |
|
SU1368240A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |