оо
со
ГС
со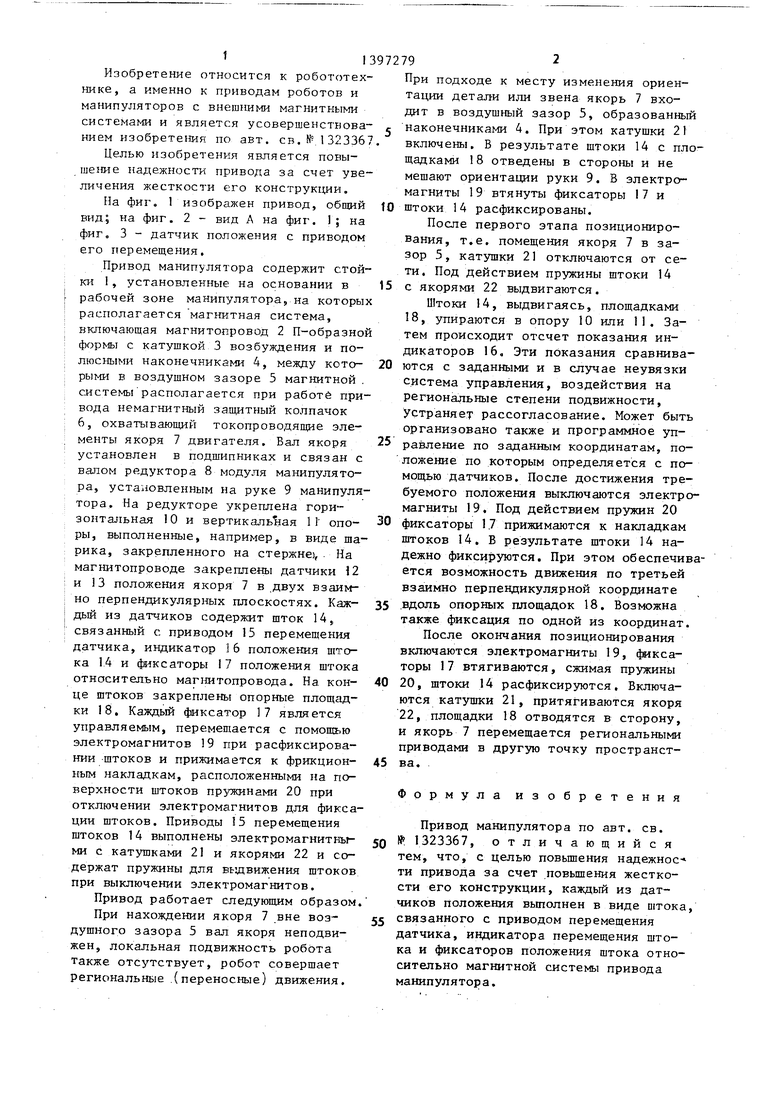
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1986 |
|
SU1323367A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Привод исполнительного органа манипулятора | 1988 |
|
SU1548041A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Исполнительный орган манипулятора | 1985 |
|
SU1268398A1 |
Изобретение относится к робототехнике, а именно к приводам роботов и манипуляторов с внешними магнитными системами. Целью изобретения является повышение надежности привода за счет увеличения жесткости его конструкции. При нахождении якоря 7 вне воздушного зазора 5 магнитной системы вал якоря неподвижен. После захода якоря 7 в воздушный зазор 5 и ориентации руки манипулятора 9 катушки приводов датчиков положения отключаются. Под действием пружин штоки 14 вьщвигаются и пластинами 18 упираются в опоры 10 и 11. Затем происходит отсчёт показаний индикаторов перемещения штоков 14. По ним происходит окончательное позиционирование руки 9 манипулятора. После этого происходит фиксирование штоков 14 управляемыми фиксаторами и включение привода манипулятора. После окончания позиционирования происходит расфикса- ция штоков 14, втягивание их и перемещение руки с якорем 7. 3 ил. (О (Л
фиг.1
Изобретение относится к робототехнике, а именно к приводам роботов и манипуляторов с внеилшми магнитными системами и является усовершенствованием изобретения но авт. св. №1323367.
Целью изобретения является повы- надежности привода за счет увеличения жесткости его конструкции.
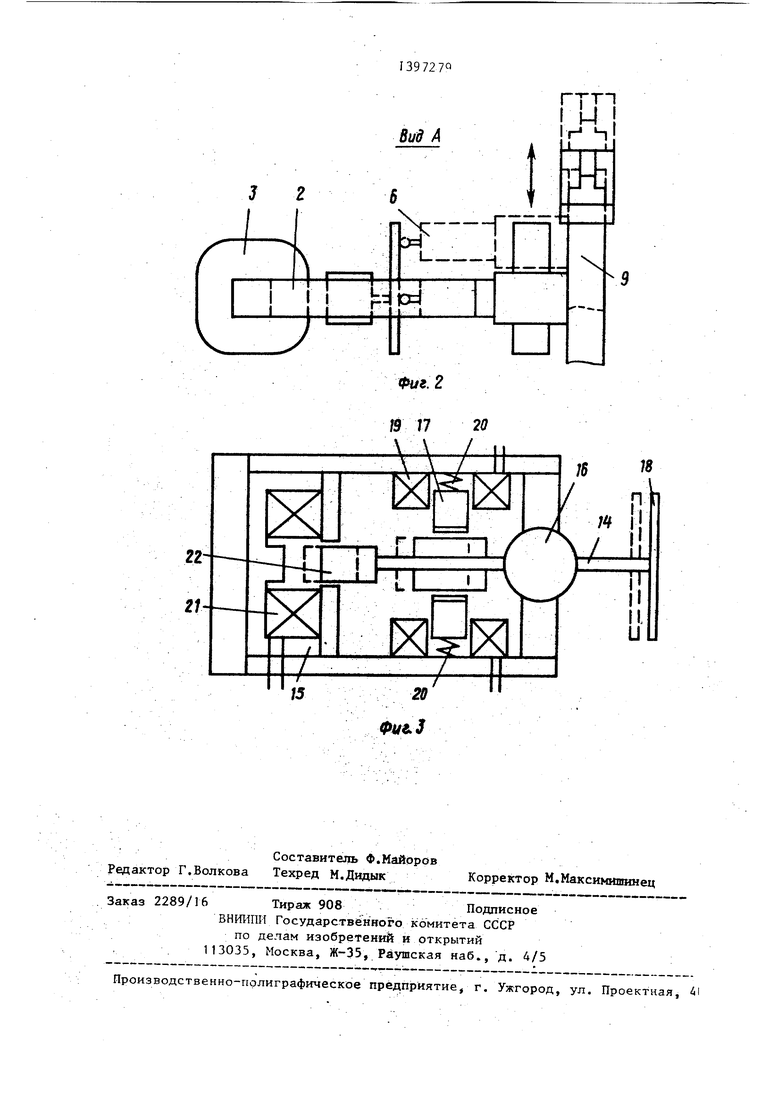
На фиг, 1 изображен нривод, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг о 3 - датчик положения с приводом его неремещения.
Привод манипулятора содержит стойки , установленные на основании в рабочей зоне манипулятора, на которых располагается мапштная система, включающая магнитопровод 2 П-образной формы с катушкой 3 возбуждения и по- люсными наконечниками 4, между которыми в воздушном зазоре 5 магнитной . с-истемы располагается при работе привода немагнитный защитный колпачок 6, охватывающий токопроводяш;ие эле- менты якоря 7 двигателя. Бал якоря установлен в подшипниках и связан с валом редуктора 8 модуля манипулятора, установленным на руке 9 манипулятора. На редукторе укреплена горизонтальная 10 и вертикаль11ая 11 опоры, выполненные, например, в виде шарика, закрепленного на стержне), . На магнитопроводе закреплены датчики 12 и 13 положения якоря 7 в двух взаимно перпендикулярных плоскостях. Каждый из датчиков содержит шток 14, связанный с приводом 15 перемещения датчика, индикатор I6 положения штока 14 и фиксаторы 17 положения штока относительно магнитопровода. На конце штоков закреплены опорные площгщ- ки 18. Каждый фиксатор 17 является управляемым, перемешается с noMoiia.ro электромагнитов 19 при расфиксирова- нии штоков и прижимается к фрикционным накладкам, расположенными на поверхности штоков прз жинами 20 при отключении электромагнитов для фиксации штоков. Приводы 15 перемещения штоков 14 выполнены электромагнитными с катзтлками 21 и якорями 22 и содержат пружины для вьздвижения штоков при выключении электромагнитов.
Привод работает следующим образом.
При нахождении якоря 7 вне воздушного зазора 5 вал якоря неподвижен, локальная подвижность робота также отсутствует, робот совершает региональные .(переносные) движения.
При подходе к месту изменения ориентации детали или звена якорь 7 входит в воздушный зазор 5, образованный
наконечниками 4. При этом катушки 21 включены. В результате штоки 14 с площадками 18 отведены в стороны и не мешают ориентации руки 9. В электромагниты 19 втянуты фиксаторы 17 и
штоки 14 расфиксированы.
После первого этапа позиционирования, т.е. помещения якоря 7 в зазор 5, катушки 21 отключаются от сети. Под действием пружины штоки 14
с якорями 22 выдвигаются.
Штоки 14, выдвигаясь, площадками 1В, упираются в опору 10 или 11. Затем происходит отсчет показания индикаторов 16„ Эти показания сравниваются с заданными и в случае неувязки система управления, воздействия на региональные степени подвижности, устраняет рассогласование. Может быть организовано также и программное управление по заданным координатам, положение по которым определяется с помощью датчиков. После достижения требуемого положения выключаются электромагниты 19. Под действием пружин 20
фиксаторы 1.7 прижимаются к накладкам штоков 14. В результате штоки 14 надежно фиксируются. При этом обеспечива ется возможность движения по третьей взаимно перпендикулярной координате
.вдоль опорных площадок 18. Возможна также фиксация по одной из координат.
После окончания позиционирования включаются электромагниты 19, фиксаторы 17 втягиваются, сжимая пружины 20, штоки 14 расфиксируются. Включаются катушки 21, притягиваются якоря 22, площадки 18 отводятся в сторону, и якорь 7 перемещается региональными приводами в другую точку пространства.
Формула изобретения
Привод манипулятора по авт. св.
№ 1323367, отличающийся тем, что, с целью повьш1ения надежное ти привода за счет повьш1ения жесткости его конструкции, каждый из датчиков положения вьтолнен в виде щтока,
связанного с приводом перемещения датчика, индикатора перемещения щтока и фиксаторов положения штока относительно магнитной системы привода манипулятора.
| Привод манипулятора | 1986 |
|
SU1323367A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
