Изобретение относится к робототехнике, а точнее к медицинским роботам, применяющихся в ортопедической стоматологии в качестве автоматических артикуляторов - имитаторов движения нижней челюсти, с помощью которых осуществляется подгонка зубных рядов при протезировании.
Известен манипулятор по а.с. СССР №1269990, опубл. 15.11.1986, бюл. №42, з-ка №3802951/25-08 от 16.10.1984. Манипулятор содержит установленную в корпусе руку со схватом и приводом перемещения руки в поперечном и продольном относительно оси руки направлениях. Привод включает четыре электромагнитных двигателя, расположенных попарно и взаимно перпендикулярно. Каждый двигатель состоит из двух электромагнитов, полюса каждого из которых расположены один против другого, и витка, установленного между этими полюсами. Перемещение руки происходит при взаимодействии витка, по которому протекает ток с полями электромагнитов, направление которых в зависимости от требуемого направления перемещения может изменяться.
При включении электромагнитов приводов, закрепленных на корпусе согласно изобретению, ферромагнитная пластина, шарнирно связанная с рукой, будет втягиваться в область, имеющую более высокую напряженность магнитного поля, т.е. в зазор между полюсами электромагнитов, обеспечивая тем самым поперечное перемещение руки в направлении включенных приводов. При продольном перемещении руки включается только один из электромагнитов приводов.
Захват детали происходит при сближении рук, несущих части схвата, посредством электромагнитных двигателей, закрепленных на основании. Перенос детали осуществляется при синхронном перемещении рук от этих же двигателей. Для освобождения детали руки расходятся.
Перемещение руки производится посредством приводом продольного перемещения и приводом поперечного перемещения, которые могут работать одновременно. Приводы связаны с рукой через рамку, установленную на направляющих, при этом рука расположена в рамке и шарнирно с ней связана с образованием кинематической пары четвертого рода
Перемещение руки в поперечных направлениях осуществляется подключением соответствующих приводов, расположенных на корпусе. При этом подвижные части приводов, втягиваясь между симметрично расположенными полюсами неподвижных частей, смещают руку. Выдвижение руки достигается при включении части катушек приводов, создающих продольное вдоль оси руки усилие. Подвижные части приводов связаны с рукой через тросы, а сами эти части подпружинены к корпусу манипулятора.
Общим недостатком описанных конструкций является их малая жесткость, связанная с наличием гибких связей.
Наиболее близким к заявляемому по технической сущности является манипулятор по а.с. СССР №1530433, опубл. 23.12.1989, бюл. №47, з-ка №4172369/31-08 от 30.12.1986. Он содержит, руку со схватом, связанную через систему направляющих элементов с установленными на корпусе и сдвинутыми на угол 90° друг относительно друга линейными электродвигателями поперечного перемещения руки, и линейными электродвигателями продольного перемещения этой руки, отличающийся тем, что с целью упрощения конструкции, система направляющих элементов выполнена в виде четырех стержней, закрепленных на руке параллельно ее оси и сдвинутых друг относительно друга на угол 90°, и четырех планок, каждая из которых жестко связана с выходным элементом соответствующего электродвигателя поперечного перемещения и установлена между стержнем, расположенным со стороны этого электродвигателя, и рукой.
Недостатком манипулятора является сложность конструкции, наличие большого числа механических сопряжений элементов.
Изобретение направлено на упрощение конструкции.
Сущность изобретения заключается в том, что артикулятор содержащий приводы и основание для нижних зубных рядов, связанное через шарниры со штоками приводов, согласно изобретению, каждый привод снабжен четырьмя магнитными системами, содержащими источник возбуждения, имеющий сердечник, окруженный катушками возбуждения, и два магнитопровода, при этом используют два параллельно расположенных на общем основании трехстепенных привода, каждый из которых содержит катушку, установленную в радиально закрепленных относительно центра катушки пружинах, расположенную в поле упомянутых равномерно разнесенных магнитных систем.
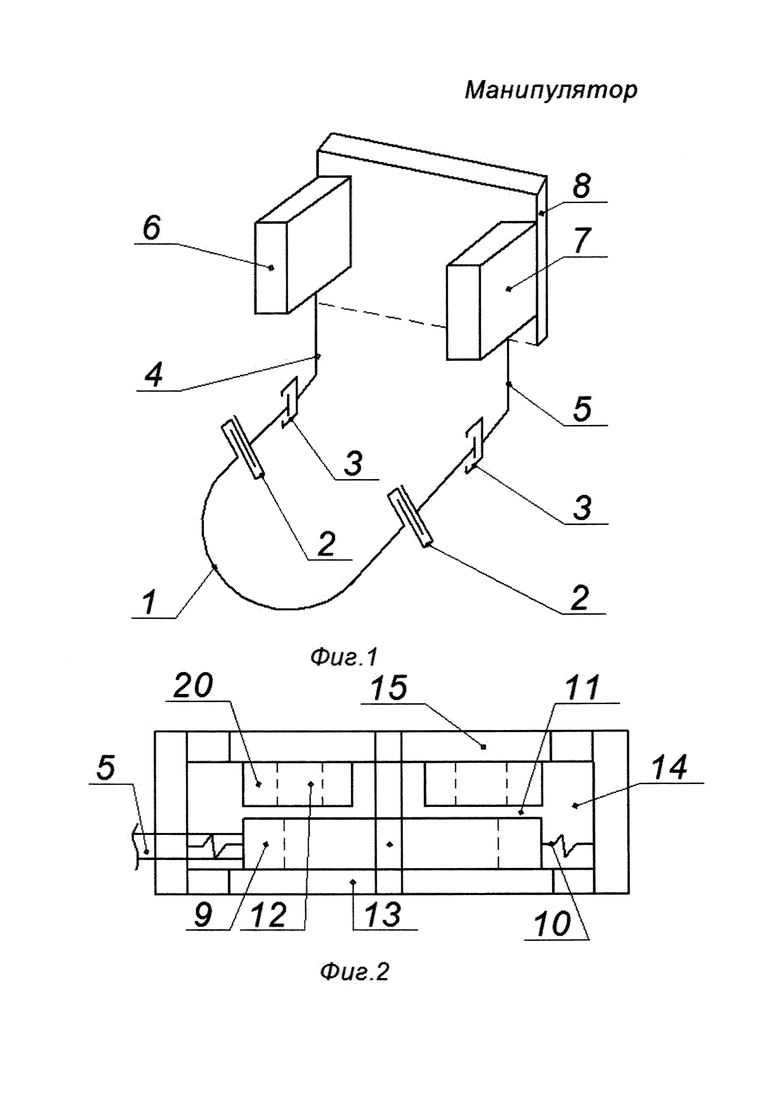
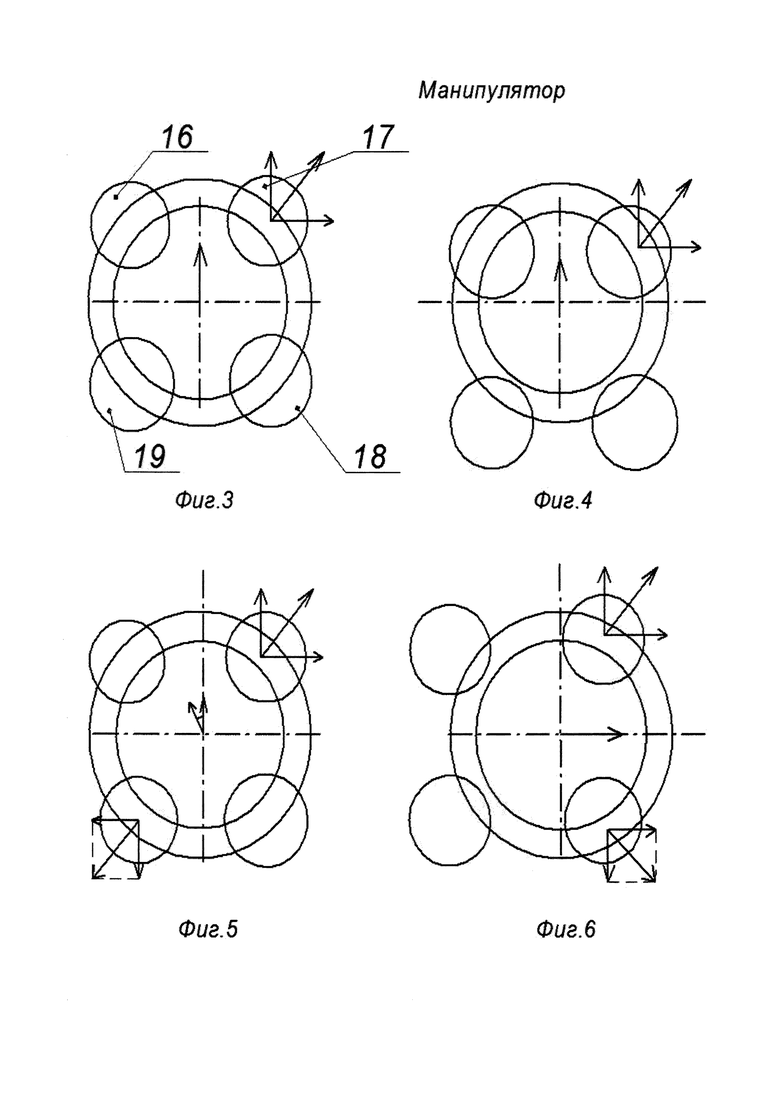
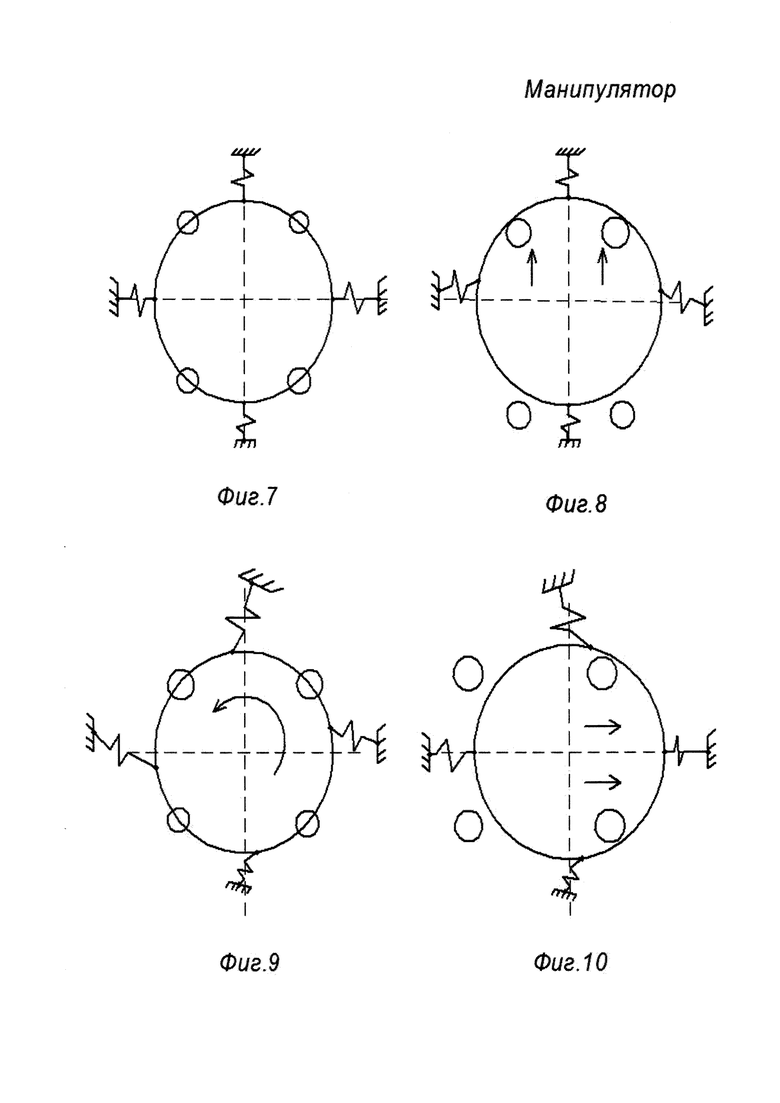
Сущность изобретения иллюстрируется чертежом, где на фиг. 1 показан общий вид артикулятора, на фиг. 2 вид сверху одного привода, на фиг. 3 показано общее расположение систем магнитной катушки, на фиг. 4 показана конфигурация включения катушек при движении вверх - вниз, на фиг. 5 то же при повороте, на фиг. 6 то же, но при движении вправо - влево. На фиг. 7 катушка показана с удерживающими пружинами в нейтральной конфигурации, фиг. 8 соответствует движению катушки с пружинами вертикально, фиг. 9 соответствует повороту, фиг. 10 соответствует движению катушки с пружинами горизонтально.
Артикулятор состоит из руки - 1, представляющей собой основание для нижних зубных рядов, рука прикреплена к шарнирам 2 и 3, которые соединены со штоками 4 и 5, штоки установлены на кольцах приводов 6 и 7, приводы установлены на общем основании 8. Каждый из приводов содержит катушки 9, установленные в радиально закрепленных, относительно центра катушки, пружинах 10. Обмотка катушек находится в воздушном зазоре 11, который образован источниками возбуждения, при этом поток замыкается через первый магнитопровод 13, основание 14 и второй магнитопровод 15. Источник возбуждения имеет сердечник 12. Магнитные системы объясняющие принцип действия на фиг. 3, 4, 5, 6 пронумерованы по часовой стрелке, то есть по позициям 16, 17, 18, 19. Сердечник 12 источника возбуждения окружен катушками возбуждения 20, которые также как и катушки 9, питаются от источников напряжения, которые на чертеже не показаны. Работа устройства.
В нейтральном состоянии, то есть при отсутствии тока в катушках 9 -катушки, штоки и рука 1 находятся в некотором нейтральном состоянии, которое характеризуется фиг. 3 и фиг. 7. При необходимости движения вертикально, вверх или вниз - полярности источника возбуждения соответствуют фиг. 4 и 8, то есть полярность источников возбуждения магнитных систем 16 и 17, противоположно полярности источников возбуждения 18 и 19.
При необходимости разворота катушек на некоторый угол, показанный на фиг. 5, источники возбуждения возбуждаются диагонально, что показано на фиг. 5, при этом происходит поворот штока относительно катушек 9, при этом поворачиваются вспомогательные шарниры, а также поддерживающую руку 1 пружины. При необходимости горизонтального перемещения задействованы вертикальные группы источников возбуждения, например 17,18 или 16,19, что показано на фиг. 6 и 10.
Таки образом, каждый из приводов 6 или 7 обеспечивают три степени подвижности, а поскольку приводов два, общее количество степеней подвижности составляет шесть, что как известно из теоретической механики достаточно для перемещения твердого тема в пространстве.
Технико-экономическим преимуществом является наличие всего двух комплексных приводов, каждый из которых обеспечивает три степени подвижности. Это упрощает механическую часть устройства, а также наличие пружин 10 обеспечивает возможность реализации резонансного режима, присущего движению нижней челюсти человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2374064C1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Схват | 1990 |
|
SU1811477A3 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Привод манипулятора | 1986 |
|
SU1397279A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| ЭЛЕКТРОМАГНИТНЫЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2283472C1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| Устройство для перемещения материала | 1986 |
|
SU1355331A1 |
Изобретение относится к робототехнике, а точнее к медицинским роботам, применяющимся в ортопедической стоматологии в качестве автоматических артикуляторов - имитаторов движения нижней челюсти, с помощью которых осуществляется подгонка зубных рядов при протезировании. Артикулятор содержит приводы и основание для нижних зубных рядов, связанное через шарниры со штоками приводов. Каждый привод снабжен четырьмя магнитными системами, содержащими источник возбуждения, имеющий сердечник, окруженный катушками возбуждения, и два магнитопровода. При этом используют два параллельно расположенных на общем основании трехстепенных привода, каждый из которых содержит катушку, установленную в радиально закрепленных относительно центра катушки пружинах, расположенную в поле упомянутых равномерно разнесенных магнитных систем. Изобретение направлено на упрощение конструкции. 10 ил.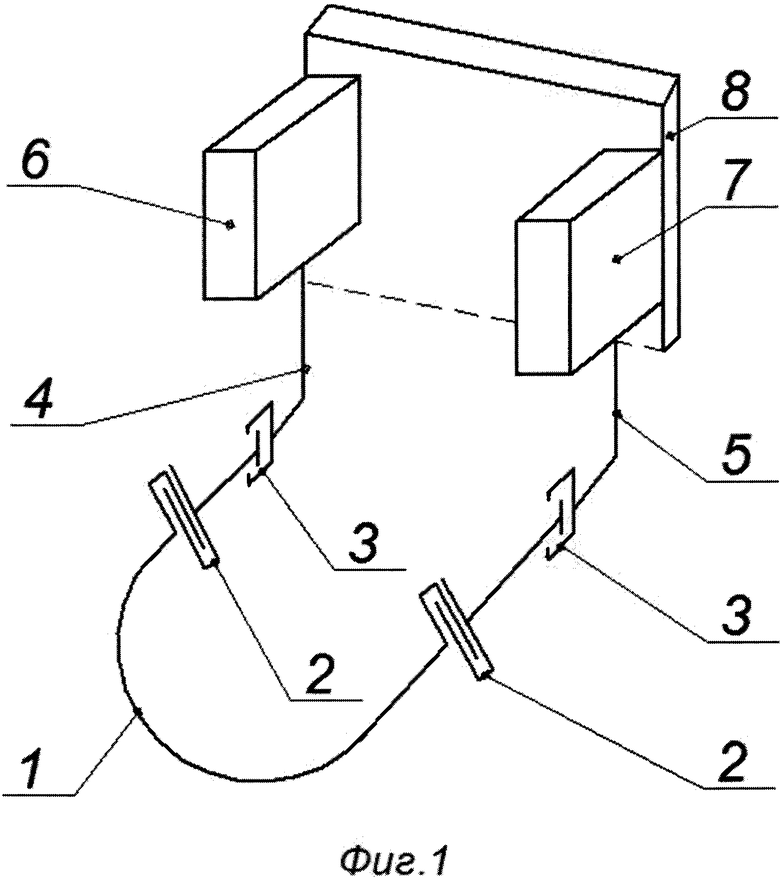
Артикулятор, содержащий приводы и основание для нижних зубных рядов, связанное через шарниры со штоками приводов, отличающийся тем, что каждый привод снабжен четырьмя магнитными системами, содержащими источник возбуждения, имеющий сердечник, окруженный катушками возбуждения, и два магнитопровода, при этом используют два параллельно расположенных на общем основании трехстепенных привода, каждый из которых содержит катушку, установленную в радиально закрепленных относительно центра катушки пружинах, расположенную в поле упомянутых равномерно разнесенных магнитных систем.
| РОБОТ-АРТИКУЛЯТОР | 2008 |
|
RU2390405C2 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2005 |
|
RU2300456C1 |
| US 6142779 A1, 07.11.2000 | |||
| US 8814564 B2, 26.08.2014 | |||
| СПОСОБ ЗАЖИГАНИЯ ГОРЮЧЕЙ СМЕСИ В КАРБЮРАТОРНЫХ ДВИГАТЕЛЯХ ВНУТРЕННЕГО СГОРАНИЯ И СИСТЕМА ЗАЖИГАНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019728C1 |

